
Wetteifern
In dieser Lektion haben Sie gelernt, wie Sie Ihren Roboter mithilfe von autonomen und Fahrersteuerungsprogrammen zum Sammeln und Werten von Ringen steuern und wie und warum Sie in VEXcode EXP. mehrere Programmplätze verwenden. Sie haben geübt, Ihre Strategie sowohl für die Fahrersteuerung als auch für autonome Bewegungen zu optimieren, und sind nun bereit, das Gelernte bei der Split Decision Challenge anzuwenden!
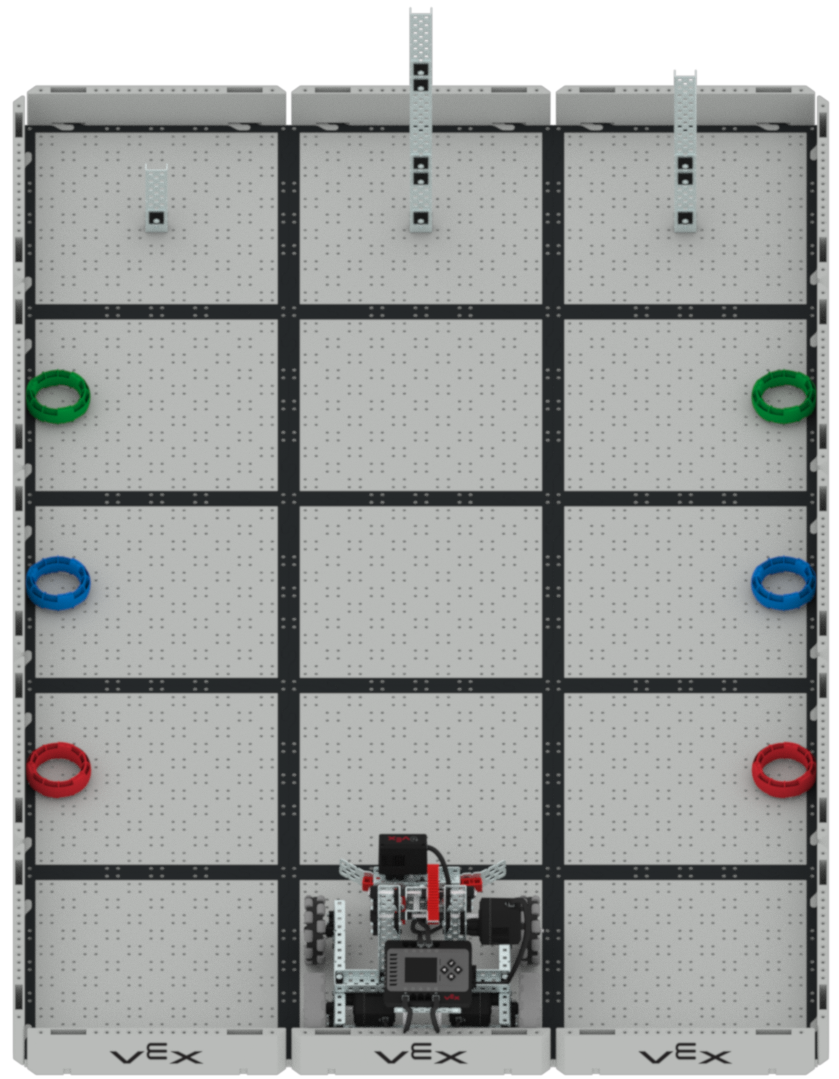
Das Ziel dieser Herausforderung besteht darin, die höchste Punktzahl zu erreichen, indem man in zwei 30-Sekunden-Läufen vier Ringe auf einem mittelgroßen Pfosten greift, bewegt und einheimst. Ein Lauf erfolgt durch den Fahrer gesteuert, der andere autonom. Die folgende Animation zeigt, wie das Feld aufgebaut sein sollte und wie die beiden Läufe gespielt und gewertet werden. Der Roboter mit den meisten Punkten gewinnt.
Im Video unten befindet sich der Clawbot auf der linken Seite des Feldes und blickt auf einen mittelgroßen Pfosten, der in der Mitte der Feldkachel vier Reihen vom Roboter entfernt in der Nähe der rechten Wand angebracht ist. Auf dem Feld befinden sich vier Ringe. Der erste liegt an der oberen Feldmauer zwischen dem zweiten und dritten Plättchen und der zweite liegt an der oberen Feldmauer zwischen dem dritten und vierten Plättchen. Der dritte und vierte Ring werden direkt gegenüber dem ersten und zweiten an der unteren Feldwand platziert. Über dem Feld befindet sich eine Stoppuhr, die auf 30 Sekunden eingestellt ist, sowie ein Gehirnsymbol, das anzeigt, dass dies der autonome Teil der Herausforderung ist. Das Video beginnt mit einem Countdown von drei. Der Clawbot bewegt sich, um Ringe aufzuheben und sie auf dem Pfosten zu platzieren, und erzielt drei der vier Punkte, bevor die Zeit abgelaufen ist, was ihm eine autonome Punktzahl von 9 ergibt. Der Fahrerkontrolllauf beginnt mit einem Countdown: 3, 2, 1. Der Clawbot fährt los, um Ringe aufzuheben und auf dem Pfosten zu platzieren. Dabei erzielt er 3 Punkte, bevor die Zeit abgelaufen ist. Die endgültige autonome Punktzahl beträgt 9 und die endgültige Fahrersteuerungspunktzahl beträgt 9 mit einer Gesamtpunktzahl von 18
Befolgen Sie die Schritte in diesem Dokument, um die Split Decision Challenge abzuschließen. Google / .docx / .pdf
Wenn Sie die Split Decision Challenge abgeschlossen haben, melden Sie sich bei Ihrem Lehrer. Stellen Sie sicher, dass Sie die Ergebnisse der Herausforderung in Ihrem technischen Notizbuch dokumentiert haben.
Abschlussreflexion
Nachdem Sie nun eine Strategie entwickelt und an der Split Decision Challenge teilgenommen haben, ist es an der Zeit, darüber nachzudenken, was Sie in dieser Lektion gelernt und getan haben. Beginnen Sie mit einer neuen Seite in Ihrem technischen Notizbuch, um mit Ihrer Reflexion zu beginnen.
Bewerten Sie sich in Ihrem technischen Notizbuch hinsichtlich der folgenden Konzepte als Anfänger, Lehrling oder Experte. Geben Sie eine kurze Begründung dafür ab, warum Sie sich für jedes Konzept diese Bewertung gegeben haben:
- Ich wende mein Wissen über benutzerdefinierte Treibersteuerung auf dem EXP Brain und in VEXcode EXP an, um meinen Roboter so zu programmieren, dass er bei der Split Decision Challenge die höchstmögliche Punktzahl erreicht.
- Planen und Durchführen eines Projekts, bei dem mein Roboter die Split Decision Challenge autonom bewältigt
- Mehrere Projektslots auf dem EXP Brain nutzen, um die höchstmögliche Punktzahl bei der Split Decision Challenge zu erreichen
- Zusammenarbeit mit meinen Teammitgliedern, um eine Gesamtstrategie für die Split Decision Challenge zu entwickeln
Mithilfe dieser Tabelle können Sie feststellen, in welche Kategorie Sie fallen.
| Experte | Ich habe das Gefühl, dass ich das Konzept vollständig verstanden habe und es jemand anderem beibringen könnte. |
| Lehrling | Ich habe das Gefühl, dass ich das Konzept ausreichend verstanden habe, um an der Herausforderung teilzunehmen. |
| Anfänger | Ich habe das Gefühl, dass ich das Konzept nicht verstanden habe und nicht weiß, wie ich die Herausforderung bewältigen soll. |
Wie geht es weiter?
In dieser Lektion haben Sie gelernt, wie Sie die Fahrersteuerung anpassen und wie Sie die autonome Bewegung Ihres Roboters planen und programmieren. Sie haben geübt, eine Strategie für die Durchführung von Aktivitäten unter Kontrolle des Fahrers und autonom zu entwickeln. Sie haben außerdem gelernt, wie und warum Sie mehrere Programmplätze in VEXcode EXP. verwenden. Jetzt ist es Zeit, am Ring Leader-Wettbewerb teilzunehmen!
In der nächsten Lektion werden Sie:
- Gehen Sie die Regeln des Wettbewerbs durch
- Entwickeln Sie eine Spielstrategie
- Nehmen Sie am Ring Leader-Wettbewerb teil!
Wählen Sie < Zurück zu Lektionen um zur Lektionsübersicht zurückzukehren.
Wählen Sie Nächste Lektion > um mit Lektion 5 fortzufahren und zu erfahren, wie Sie am Ring Leader-Wettbewerb teilnehmen können!