
يلعب
الجزء الأول - خطوة بخطوة
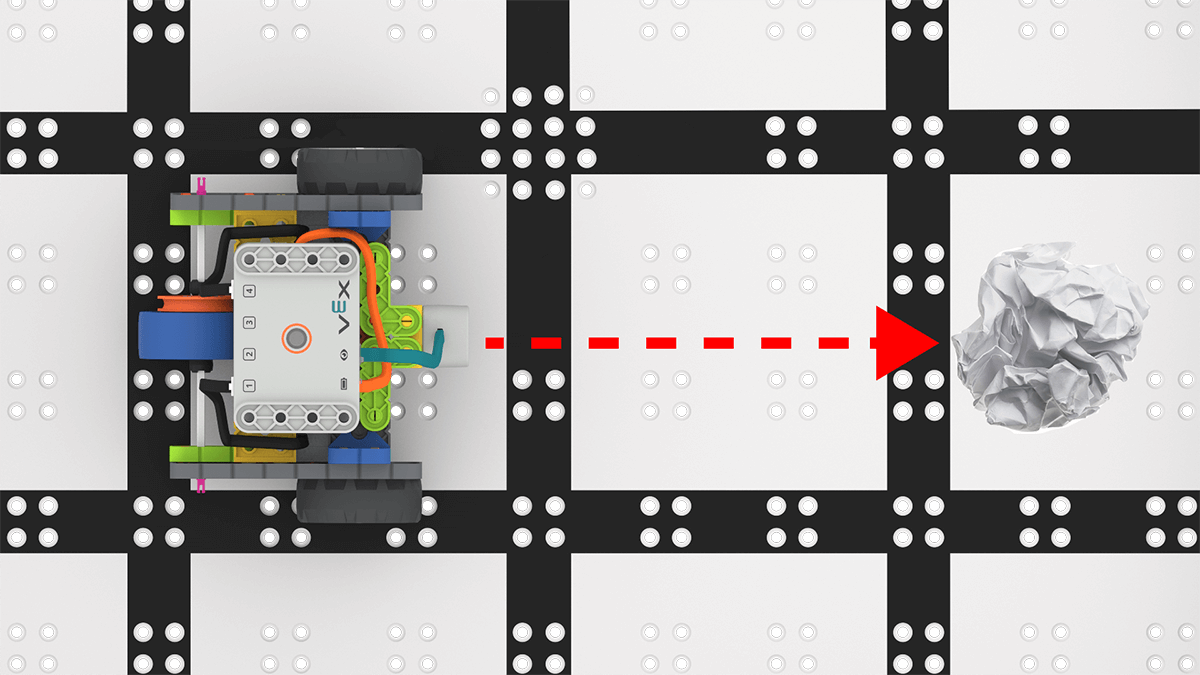
- تعليماتأرشد الطلاب إلى أنهم سيقومون ببناء مشروع في VEXcode GO لتشغيل قاعدة التعليمات البرمجية حتى يتم اكتشاف جسم في منطقة هبوط المريخ (الحقل). يوضح الرسم المتحرك أدناه كيفية تحرك قاعدة التعليمات البرمجية عند بدء هذا المشروع.
تأكد من استخدام أشياء فاتحة اللون أو بيضاء اللون لتمثيل "العائق" في منطقة الهبوط لضمان أن يكتشف مستشعر العين هذا الشيء. يمكن للطلاب إزالة العائق بمجرد وصول Code Base إليه وتوقفه.
ملف الفيديو - نموذجنموذج للطلاب حول كيفية بناء المشروع في VEXcode GO واختبار مشاريعهم على أرض الواقع.
- ابدأ بإظهار للطلاب كيفية ربط الدماغ في قاعدة التعليمات البرمجية الخاصة بهم بجهازهم في VEXcode GO. لأن خطوات الاتصال تختلف بين الأجهزة, انظر Connecting articles of the VEXcode GO VEX Library للحصول على خطوات محددة لتوصيل VEX GO Brain بالكمبيوتر أو الجهاز اللوحي.
- سوف يحتاجون أيضًا إلى تكوين VEXCode GO لقاعدة التعليمات البرمجية. If necessary, model the steps from the Configure a Code Base مقالة مكتبة VEX and ensure students can انظر Drivetrain blocks in the Toolbox.
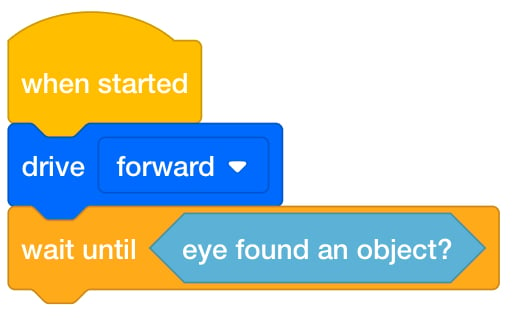
- اسحب كتلة [Drive] إلى مساحة العمل وألصقها بالكتلة {When started}.

إضافة كتلة [Drive] - ثم اطلب من الطلاب أن يضيفوا كتلة [انتظر حتى]. بعد ذلك، اسحب كتلة<Found object> داخل المساحة السداسية داخل كتلة [انتظر حتى].
أضف [انتظر حتى] مع <Found object> - اطلب من الطلاب إضافة كتلة [إيقاف القيادة] لجعل قاعدة التعليمات البرمجية تتوقف عن القيادة عند اكتشاف كائن ما.
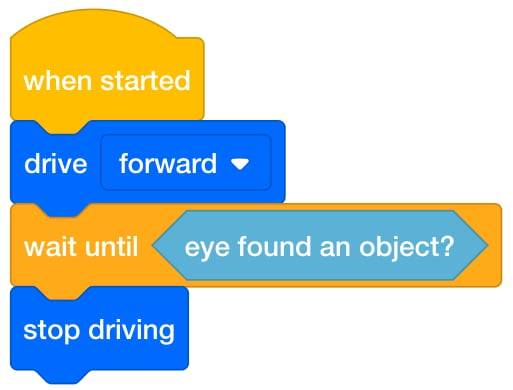
أضف [توقف عن القيادة] - بمجرد أن يقوم الطلاب ببناء مشروعهم، اطلب منهم تسمية مشروعهم بـ Drive Until 1 وحفظه على أجهزتهم. انظر Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
نموذج للطلاب حول كيفية اختبار مشروعهم ميدانيا.
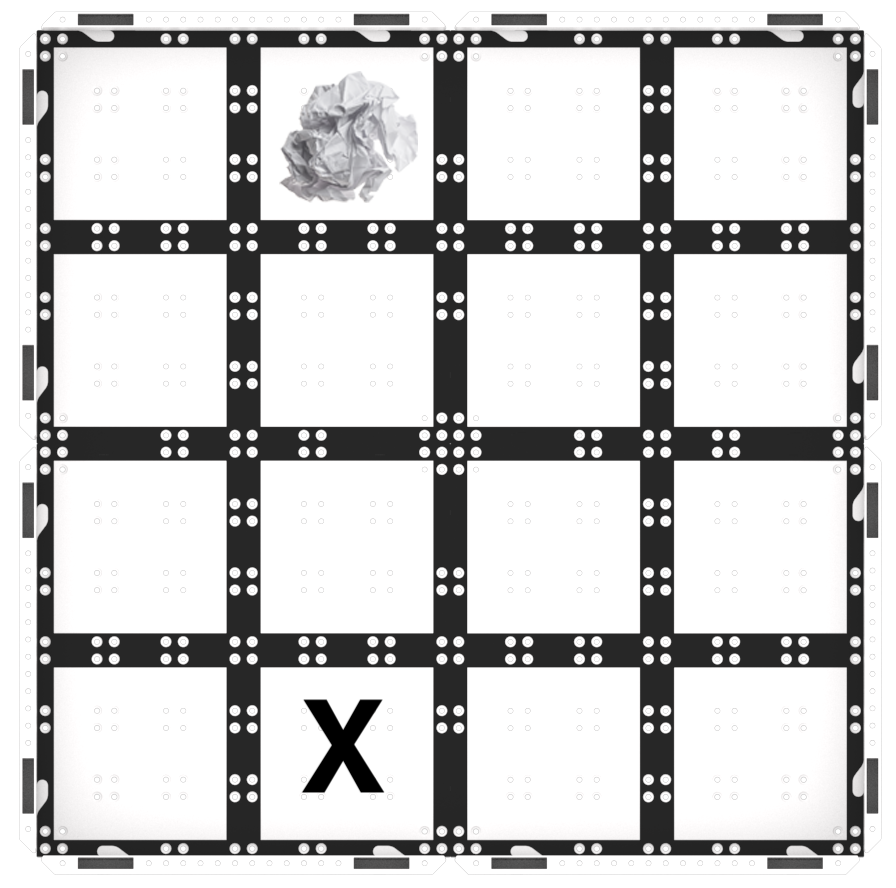
- أولاً، أظهر لهم كيفية وضع العائق وقاعدة التعليمات البرمجية في المربع الذي يحمل علامة "X".
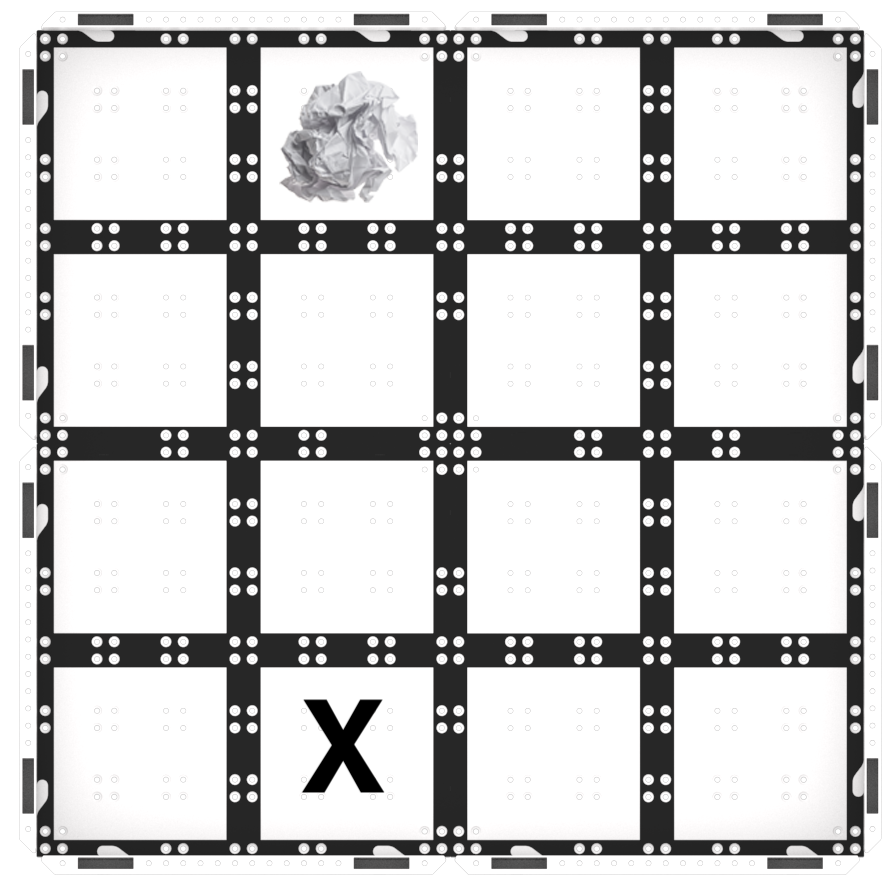
ضع العائق على الحقل وقاعدة التعليمات البرمجية على "X" - تأكد من أن مستشعر العين الموجود في مقدمة الروبوت يواجه العائق.
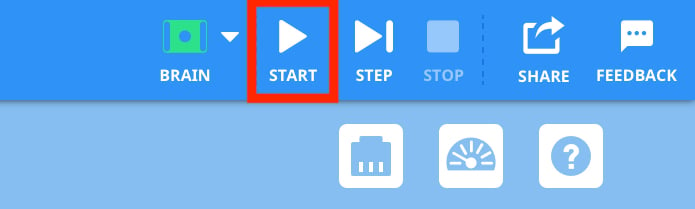
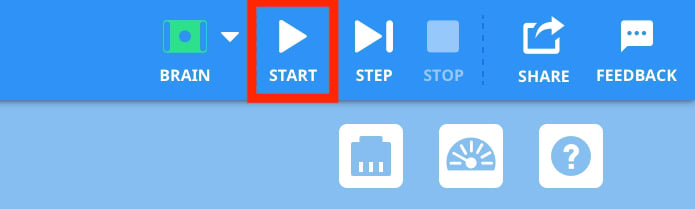
يواجه مستشعر العين عقبة - بمجرد وضع قاعدة التعليمات البرمجية في الحقل، اطلب من الطلاب تحديد "بدء" في VEXcode GO لاختبار مشاريعهم.
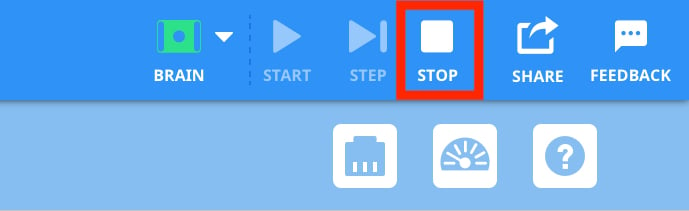
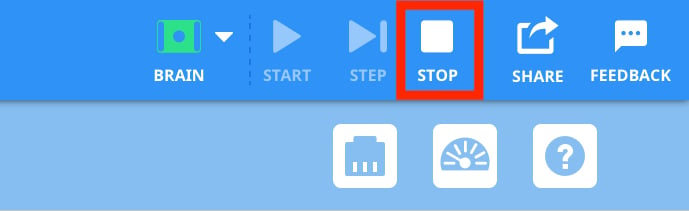
حدد البدء لاختبار المشروع - بعد انتهاء تنفيذ المشروع، سيحتاج الطلاب إلى تحديد زر "إيقاف" في شريط الأدوات.
حدد المحطة - بالنسبة للمجموعات التي تنتهي مبكرًا وتحتاج إلى تحديات إضافية، اطلب منهم نقل العائق إلى موقع جديد واختبار مشروعهم مرة أخرى.
- تسهيلتسهيل المحادثة مع الطلاب أثناء اختبارهم لمشاريعهم.
- كيف يتحرك روبوت Code Base في هذا المشروع؟ هل يمكنك أن تظهر لي بيديك؟
- كيف عرف Code Base متى يجب التوقف؟
- كيف تعرف أن هناك شيء أمامك؟
- إذا كنت قاعدة التعليمات البرمجية، أي من حواسك ستساعدك في القيادة حتى الوصول إلى شيء ما؟
- تذكيرذكّر الطلاب أنه على الرغم من أن هذا مشروع صغير، إلا أنهم قد يرتكبون أخطاء وقد يستغرق الأمر أكثر من محاولة لإنجاح مشروعهم. لتشجيع الطلاب على تقبل الأخطاء على طول الطريق، اطرح أسئلة مثل:
- ما هو الخطأ الذي ارتكبته والذي علمك شيئًا؟
- ما هو الجزء من المختبر الذي جعلك تفكر بجدية؟
- هل كان من الصعب محاذاة قاعدة التعليمات البرمجية بحيث يواجه مستشعر العين الكائن؟ ما هي الاستراتيجية التي استخدمتها لترتيبها؟
- اسألاطلب من الطلاب تسمية أو وصف جهاز أو كائن يعتقدون أنه يستخدم مستشعر العين. اسألهم إذا كانوا قد سمعوا عن المكنسة الكهربائية الروبوتية؟ هل يمكنهم وصف كيفية عمل الأوامر [Drive] و[Wait until] و <Found object> مع هذا الجهاز؟
مناقشة جماعية & استراحة منتصف اللعب
بمجرد أن تنتهي كل مجموعة من اختبار مشاريعها، يجتمعون معًا لإجراء محادثة قصيرة .
- قم بعرض شاشتك حتى يتمكن جميع الطلاب من رؤية الكود، أو قم بتوجيه الطلاب إلى منطقة مركزية حيث يمكنهم جميعًا رؤية الكود على جهازك اللوحي أو الكمبيوتر.
- ابدأ مشروع Drive Until 1 واطلب من الطلاب مشاهدة الكود أثناء تشغيل المشروع ووصف ما يرونه. اطلب من الطلاب وصف ما يحدث مع ميزة التمييز، وتحديد أنها تبقى على كتلة [انتظر حتى] حتى يكتشف مستشعر العين وجود كائن.
- كيف يتحرك الضوء الأخضر عندما نبدأ مشروعنا؟
- لماذا تعتقد أن الضوء الأخضر يتوقف مؤقتًا في كتلة [انتظر حتى]؟
- ما الذي تعتقد أن النقطة البارزة تخبرنا به؟
الجزء الثاني - خطوة بخطوة
- تعليماتقم بتوجيه الطلاب إلى أنهم سيضيفون إلى مشروعهم حتى ترسل قاعدة التعليمات البرمجية إشارات عندما يكتشف مستشعر العين عائقًا في منطقة هبوط المريخ. سيضيف الطلاب مستشعر LED Bumper إلى الروبوت الخاص بهم، ثم يضيفون كتلتي [تعيين لون المصد] و[انتظار] إلى مشروعهم لإنشاء تأثير إشارة.
عندما يختبرون مشاريعهم، يقومون بإزالة العائق عندما يضيء الروبوت. يوضح الرسم المتحرك أدناه كيفية تحرك قاعدة التعليمات البرمجية عند بدء المشروع. بمجرد أن يضيء مصباح LED الموجود على قاعدة التعليمات البرمجية، سيتعين على الطلاب إزالة العائق من الملعب. ويظهر هذا أيضًا في الرسوم المتحركة.
ملف الفيديو - النموذجنموذج للطلاب حول كيفية إضافة مستشعر LED Bumper إلى قاعدة التعليمات البرمجية الخاصة بهم.
- هناك العديد من الطرق التي يمكن للطلاب من خلالها إضافة LED Bumper إلى قاعدة التعليمات البرمجية. فيما يلي طريقة سريعة وسهلة لإضافتها إلى الجزء العلوي من قاعدة التعليمات البرمجية باستخدام دبابيس حمراء فقط والمستشعر. يجب توصيل مستشعر LED Bumper بمنفذ 2 على GO Brain.
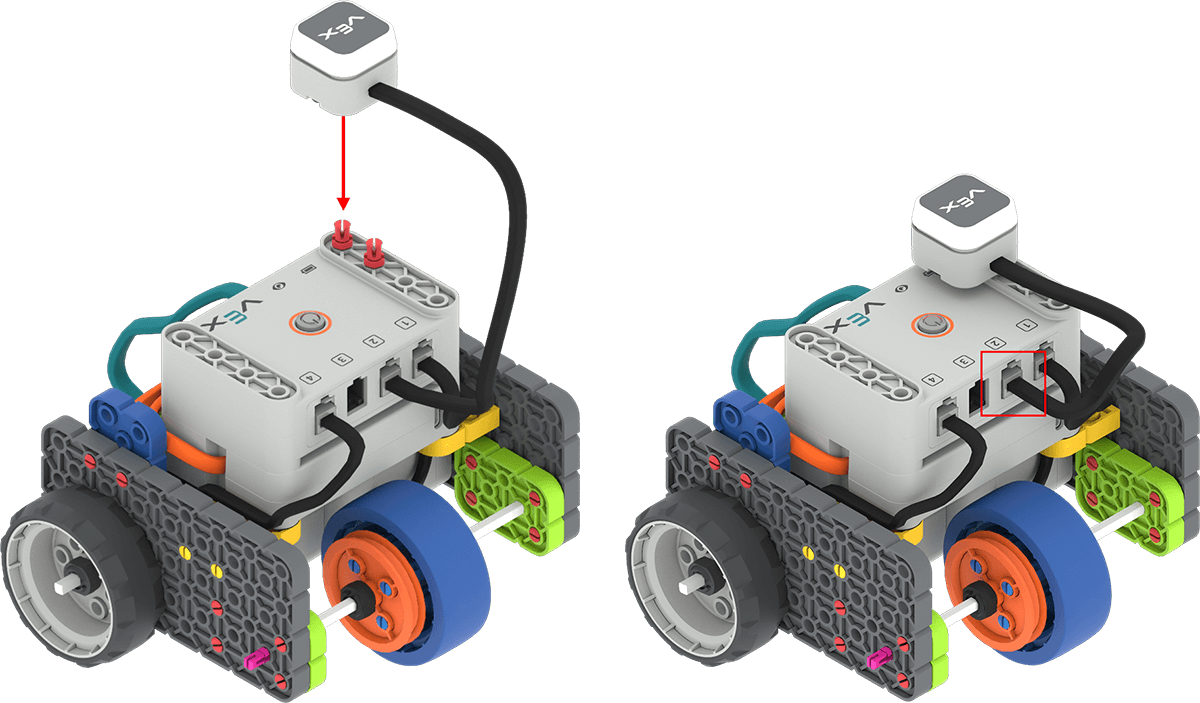
أضف مستشعر مصد LED وقم بتوصيله بالمنفذ 2 نموذج لكيفية البناء على مشروع VEXcode GO الحالي واختباره على أرض الواقع.
- If students need to open their Drive Until 1 project, model the device-specific steps, as shown in the مقالة مكتبة VEXs in the Open and Save section.
-
اطلب من الطلاب إضافة كتل إلى مشاريع VEXcode GO الخاصة بهم لإعادة إنشاء الكود الموجود في الصورة أدناه. ستحتوي الكتل الجديدة على مصباح LED يضيء باللون الأحمر لمدة 3 ثوانٍ للإشارة إلى اكتشاف جسم ما. يشير المربع الأحمر إلى الكتل الجديدة التي يجب إضافتها إلى المشروع.
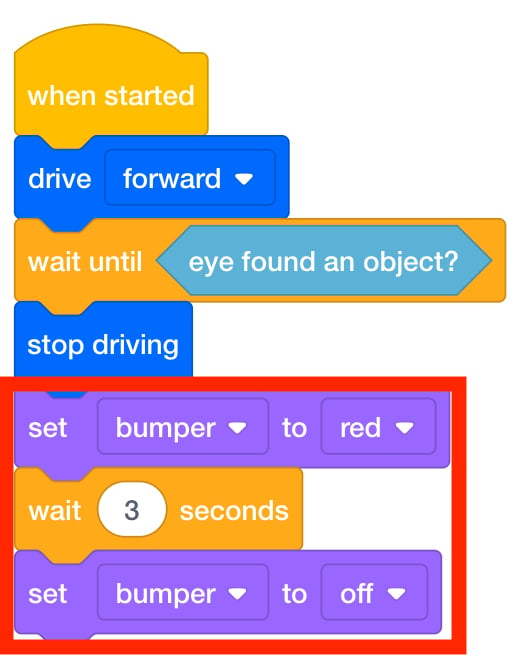
أضف كتلًا لجعل مصد LED يضيء - سيؤدي تعيين كتلة [تعيين لون المصد] على اللون الأحمر إلى توهج المصد LED باللون الأحمر.
- تنتظر كتلة [الانتظار] مدة زمنية محددة قبل الانتقال إلى الكتلة التالية.
- سيؤدي ضبط كتلة [تعيين لون المصد] على إيقاف إلى إيقاف تأثير التوهج.
- بمجرد أن يقوم الطلاب ببناء مشروعهم، اطلب منهم تسمية مشروعهم باسم Drive Until 2 وحفظه على أجهزتهم. انظر قسم الفتح والحفظ في مكتبة VEXcode GO VEX للحصول على خطوات خاصة بالجهاز لحفظ مشروع VEXcode GO.
- اطلب من الطلاب وضع قاعدة التعليمات البرمجية الخاصة بهم في الميدان لاختبار مشروعهم.
ضع العائق على الحقل وقاعدة التعليمات البرمجية على "X" - بمجرد وضع قاعدة التعليمات البرمجية في الحقل، اطلب من الطلاب تحديد "بدء" في VEXcode GO لاختبار مشاريعهم.
حدد "ابدأ" لاختبار المشروع - بعد أن يقوم Code Base بالقيادة حتى يكتشف العائق، يجب أن يضيء مصباح LED باللون الأحمر لمدة 3 ثوانٍ للإشارة إلى اكتشافه لجسم ما. يجب على الطلاب إزالة الجسم عندما يضيء مصباح LED باللون الأخضر.
- أخبر الطلاب أنه سيتعين عليهم تحديد زر "إيقاف" في شريط الأدوات بعد إزالة الكائن.
حدد المحطة - إذا أنهى الطلاب بناء مشاريعهم واختبارها بسرعة، فاطلب منهم إضافة كتل Drivetrain إضافية إلى مشروعهم حتى تعود قاعدة التعليمات البرمجية إلى موضع البداية. شجعهم على تجربة المسارات المختلفة التي يمكن لقاعدة التعليمات البرمجية اتباعها للعودة إلى نقطة البداية.
- تسهيلتسهيل قيام الطلاب باختبار مشاريعهم والتناوب عليها في الميدان. أثناء اختبار الطلاب، اطرح عليهم أسئلة حول مستشعر العين، وكيف ستتحرك قاعدة التعليمات البرمجية استنادًا إلى الكتل الموجودة في مشروعهم.
- كيف ستشير قاعدة التعليمات البرمجية الخاصة بك إلى أنها اكتشفت كائنًا؟ ما هي الكتل التي تستخدمها لإنجاز هذا؟
- ما مدى البعد عن العائق الذي يقع عليه Code Base عندما يتوقف عن القيادة؟ هل يمكنك أن تظهر لي بيديك؟
- ما هي الكتل الموجودة في مشروعنا التي تخبر قاعدة التعليمات البرمجية بالتوقف عن القيادة؟
Review the Using the VEX GO Sensors and the Coding with the VEX GO LED Bumper articles for information on the LED Bumper to help students who need additional support to understand how the sensors work in their project.
- تذكيرذكّر الطلاب بضرورة التحقق من مشروعهم ومقارنته بصورة المشروع، قبل الاختبار. إذا قام أحد الطلاب ببناء المشروع في VEXcode GO، فيمكن لشريكه التحقق من الكود، قبل وضع قاعدة الكود في الحقل وبدء المشروع.
- اسألاسأل الطلاب، كيف يستكشف العلماء الأماكن البعيدة؟
يقوم العلماء والمهندسون بتصميم أنواع مختلفة من الروبوتات لاستكشاف المناطق البعيدة جدًا أو التي يصعب على البشر استكشافها. يقوم العلماء بتصميم مركبات فضائية لاستكشاف المريخ، وغواصات بدون طيار للتحقيق في المحيط، وحتى إرسال طائرات بدون طيار إلى البراكين النشطة لجمع البيانات!
- كيف يمكن للعلماء برمجة غواصة لاستخدام أجهزة استشعار العين لاستكشاف المحيط؟
- كيف يمكن للعلماء استخدام أجهزة استشعار العين على طائرة بدون طيار للمساعدة في استكشاف البركان؟ ما هو الأمر الذي سيستخدمونه لجعل الطائرة بدون طيار تطير حتى تقترب من جدران البركان؟
- ما هي المهام الأخرى التي يمكن للعلماء برمجة مركبة المريخ للقيام بها باستخدام مستشعر العين؟