
Spielen
Teil 1 - Schritt für Schritt
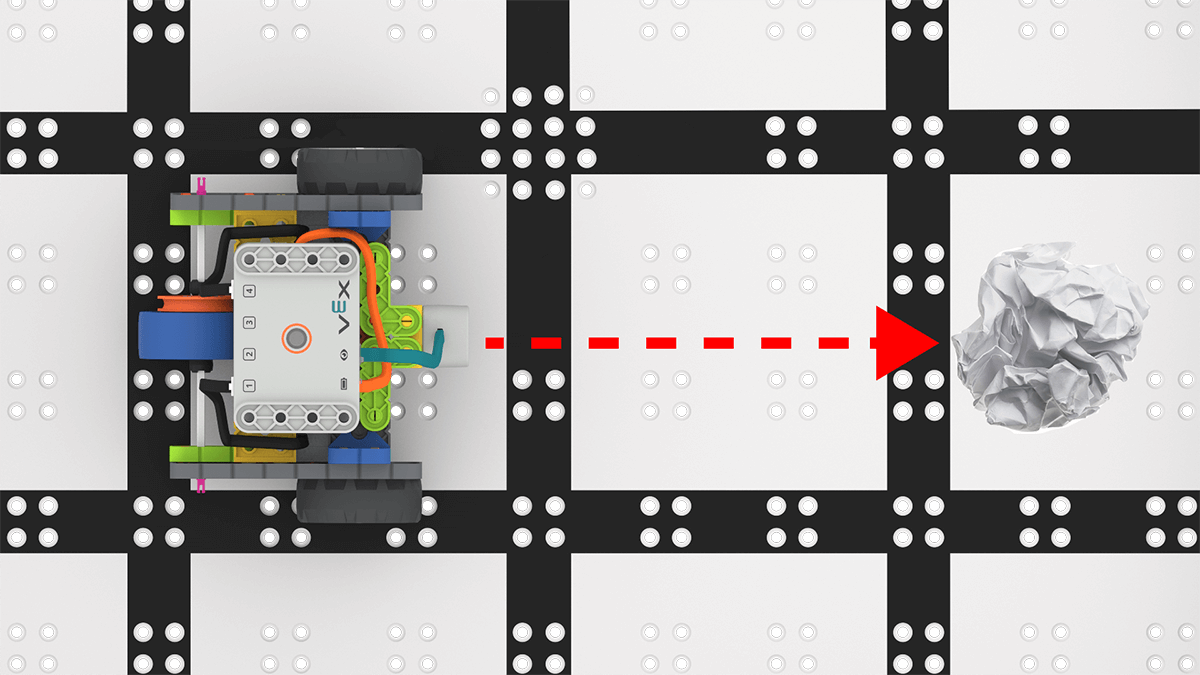
- AnweisungenWeisen Sie die Schüler an, dass sie in VEXcode GO ein Projekt erstellen werden, um die Code Base zu steuern, bis sie ein Objekt auf der Marslandefläche (dem Feld) erkennt. Die folgende Animation zeigt, wie sich die Codebasis bewegt, wenn dieses Projekt gestartet wird.
Verwenden Sie unbedingt helle oder weiße Objekte, um das „Hindernis“ auf der Landefläche darzustellen, damit der Augensensor dieses Objekt erkennt. Die Schüler können das Hindernis beseitigen, sobald die Code Base darauf zufährt und anhält.
Videodatei - ModellModell für Studenten, wie sie das Projekt in VEXcode GO erstellen und ihre Projekte im Feld testen.
- Zeigen Sie den Schülern zunächst, wie sie das Brain auf ihrer Code Base mit ihrem Gerät in VEXcode GO verbinden. Da die Verbindungsschritte je nach Gerät unterschiedlich sind, see the Connecting articles of the VEXcode GO VEX Library Hier finden Sie spezifische Schritte zum Anschließen des VEX GO Brain an Ihren Computer oder Tablet.
- Sie müssen auch VEXCode GO für die Codebasis konfigurieren. If necessary, model the steps from the Configure a Code Base VEX Library article and ensure students can see the Drivetrain blocks in the Toolbox.
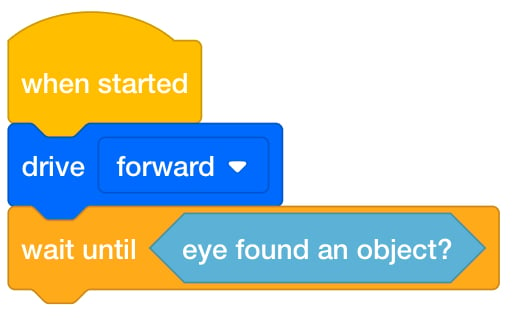
- Ziehen Sie einen [Drive]-Block in den Arbeitsbereich und hängen Sie ihn an den {When started} -Block an.

[Laufwerk] Block hinzufügen- Lassen Sie die Schüler dann einen [Warten bis]-Block hinzufügen. Ziehen Sie als Nächstes einen<Found object> Block in den sechseckigen Bereich innerhalb des Blocks [Warten bis].
Addiere [Warten bis] mit <Found object> - Lassen Sie die Schüler einen [Fahrt stoppen]-Block hinzufügen, damit die Codebasis die Fahrt stoppt, wenn ein Objekt erkannt wird.
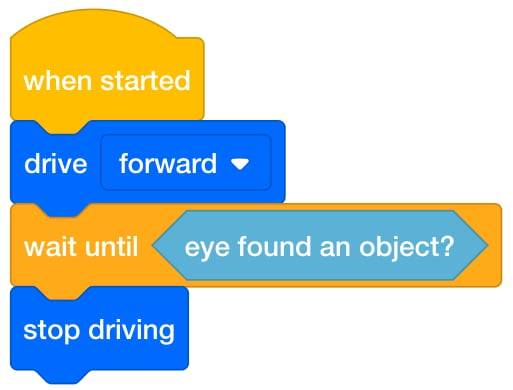
Hinzufügen [Fahren beenden] - Nachdem die Schüler ihr Projekt erstellt haben, sollen sie es „ Drive Until 1 “ nennen und auf ihrem Gerät speichern. See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
Modell für Studierende, wie sie ihr Projekt vor Ort testen können.
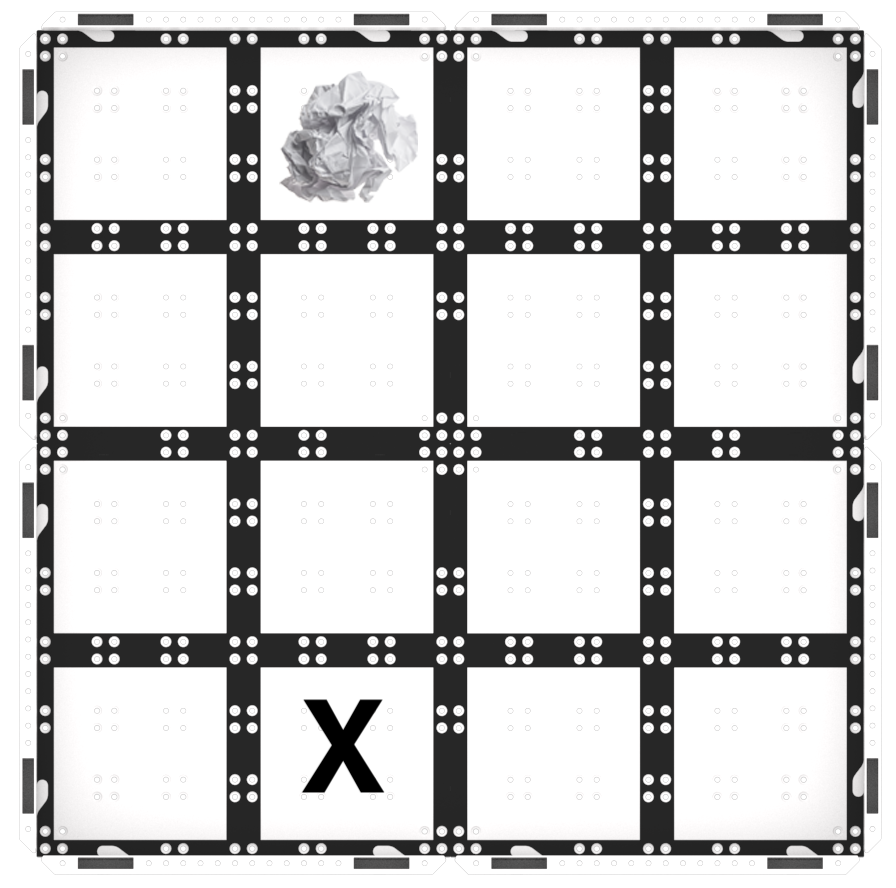
- Zeigen Sie ihnen zunächst, wie sie das Hindernis und die Codebasis auf dem Quadrat mit dem „X“ platzieren.
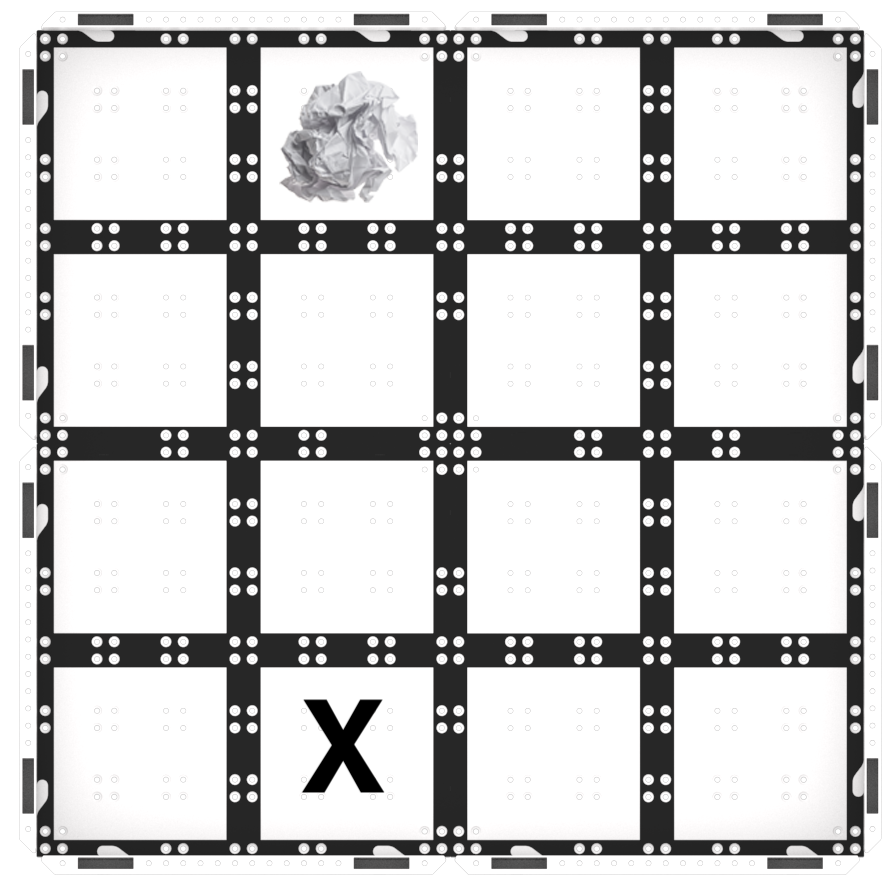
Platziere das Hindernis auf dem Feld und die Codebasis auf dem „X“ - Stellen Sie sicher, dass der Augensensor an der Vorderseite des Roboters auf das Hindernis gerichtet ist.
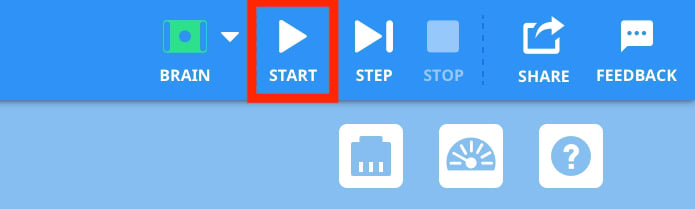
Augensensor steht vor Hindernis - Sobald die Codebasis im Feld platziert ist, lassen Sie die Schüler in VEXcode GO „Start“ auswählen, um ihre Projekte zu testen.
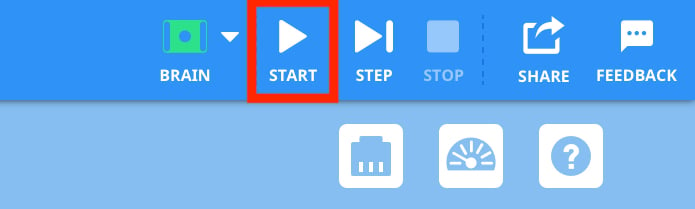
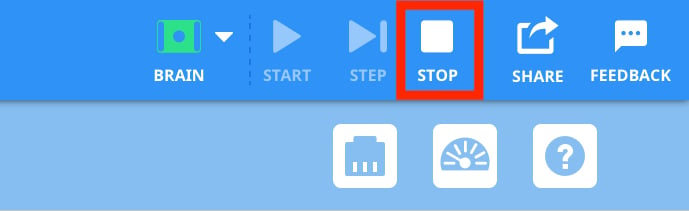
Wählen Sie „Starten“, um Projekt zu testen- Nachdem das Projekt beendet ist, müssen die Schüler in der Symbolleiste auf die Schaltfläche „Stopp“ klicken.
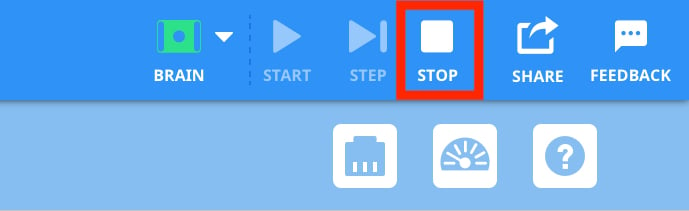
Stopp auswählen- Lassen Sie Gruppen, die früher fertig sind und zusätzliche Herausforderungen benötigen, das Hindernis an einen neuen Ort verlegen und ihr Projekt erneut testen.
- ModerierenModerieren Sie ein Gespräch mit den Schülern, während sie ihre Projekte testen.
- Wie bewegt sich der Code Base-Roboter in diesem Projekt? Kannst du es mir mit deinen Händen zeigen?
- Woher wusste die Codebasis, wann sie aufhören musste?
- Woher wissen Sie, wann etwas vor Ihnen liegt?
- Wenn Sie die Code-Basis wären, welche Ihrer Sinne würden Ihnen helfen, bis zu einem Objekt zu gelangen?
- ErinnernErinnern Sie die Schüler daran, dass ihnen, obwohl es sich um ein kleines Projekt handelt, Fehler unterlaufen können und dass sie möglicherweise mehrere Versuche benötigen, bis ihr Projekt erfolgreich abgeschlossen ist. Um die Schüler zu ermutigen, ihre Fehler zu akzeptieren, stellen Sie Fragen wie:
- Welchen Fehler haben Sie gemacht, aus dem Sie etwas gelernt haben?
- Welcher Teil des Labors hat Sie zum Nachdenken angeregt?
- War es schwierig, die Codebasis so auszurichten, dass der Augensensor auf das Objekt zeigte? Welche Strategie haben Sie zum Ausrichten verwendet?
- FrageBitten Sie die Schüler, ein Gerät oder Objekt zu benennen oder zu beschreiben, von dem sie glauben, dass es einen Augensensor verwendet. Fragen Sie sie, ob sie schon einmal von einem Staubsaugerroboter gehört haben? Können sie beschreiben, wie die Befehle [Fahren], [Warten bis] und <Found object> mit diesem Gerät funktionieren könnten?
Spielpause & Gruppendiskussion
Sobald jede Gruppe mit dem Testen ihrer Projektefertig ist, kommen Sie zu einem kurzen Gespräch zusammen.
- Projizieren Sie Ihren Bildschirm so, dass alle Schüler den Code sehen können, oder bringen Sie die Schüler zu einem zentralen Bereich, wo sie alle den Code auf Ihrem Tablet oder Computer sehen können.
- Starten Sie das Projekt Drive Until 1 “ und bitten Sie die Schüler, den Code während der Ausführung des Projekts zu beobachten und zu beschreiben, was sie sehen. Weisen Sie die Schüler an, zu beschreiben, was mit der Hervorhebungsfunktion geschieht, und zu erkennen, dass sie im Block [Warten bis] bleibt, bis der Augensensor ein Objekt erkennt.
- Wie bewegt sich die grüne Markierung, wenn wir unser Projekt starten?
- Warum verharrt die grüne Markierung Ihrer Meinung nach beim Block [Warten bis]?
- Was sagt uns Ihrer Meinung nach dieses Highlight?
Teil 2 - Schritt für Schritt
- UnterrichtenWeisen Sie die Schüler an, ihr Projekt so zu erweitern, dass die Codebasis signalisiert, wenn der Augensensor ein Hindernis im Marslandebereich erkannt hat. Die Schüler fügen ihrem Roboter einen LED-Stoßfängersensor hinzu und fügen dann ihrem Projekt die Blöcke [Stoßfängerfarbe festlegen] und [Warten] hinzu, um einen Signaleffekt zu erzeugen.
Während sie ihre Projekte testen, beseitigen sie das Hindernis, wenn der Roboter leuchtet. Die folgende Animation zeigt, wie sich die Codebasis bewegt, wenn das Projekt gestartet wird. Sobald der LED-Stoßfänger an der Code-Basis leuchtet, müssen die Schüler das Hindernis vom Feld entfernen. Dies wird auch in der Animation gezeigt.
Videodatei - ModellModell für Studenten, wie sie den LED-Stoßfängersensor zu ihrer Codebasis hinzufügen.
- Es gibt viele Möglichkeiten, wie Schüler den LED-Stoßfänger zur Codebasis hinzufügen können. Unten finden Sie eine schnelle und einfache Möglichkeit, es mit nur zwei roten Stiften und dem Sensor oben in der Codebasis hinzuzufügen. Der LED-Stoßfängersensor muss an Port 2 des GO Brain angeschlossen werden.
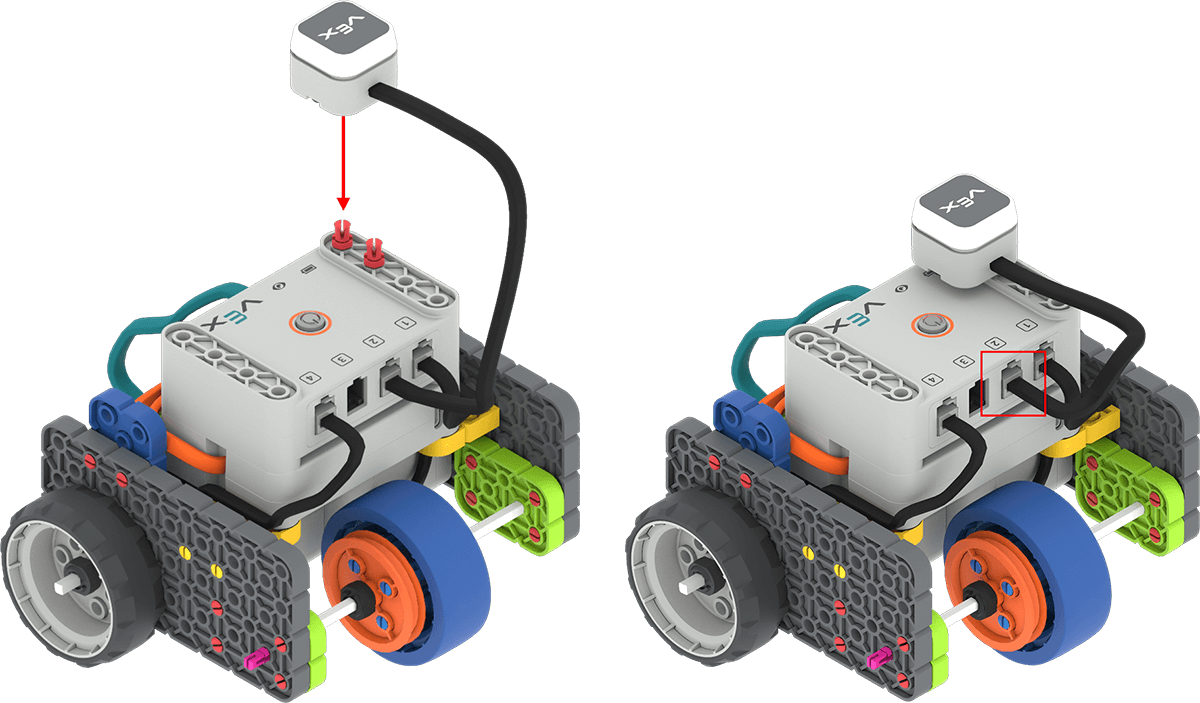
LED-Stoßfängersensor hinzufügen und an Port 2 anschließen Modellieren Sie, wie Sie auf Ihrem vorhandenen VEXcode GO-Projekt aufbauen und es vor Ort testen können.
- If students need to open their Drive Until 1 project, model the device-specific steps, as shown in the VEX Library articles in the Open and Save section.
-
Lassen Sie die Schüler Blöcke zu ihren VEXcode GO-Projekten hinzufügen, um den Code im Bild unten neu zu erstellen. Bei den neuen Blöcken leuchtet der LED-Bumper 3 Sekunden lang rot, um zu signalisieren, dass ein Objekt erkannt wurde. Das rote Kästchen zeigt die neuen Blöcke an, die dem Projekt hinzugefügt werden müssen.
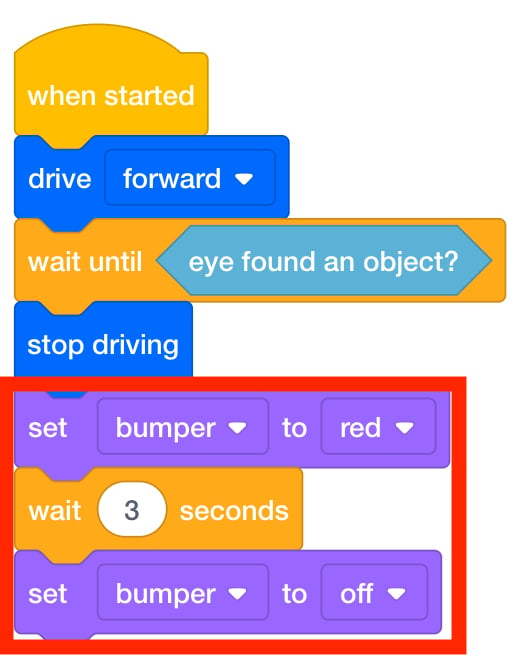
Füge Blöcke hinzu, damit der LED-Stoßfänger leuchtet - Wenn der Block [Stoßfängerfarbe festlegen] auf Rot eingestellt ist, leuchtet der LED-Stoßfänger rot.
- Der Block [Warten] wartet eine bestimmte Zeit, bevor mit dem nächsten Block fortgefahren wird.
- Wenn der Block [Stoßstangenfarbe festlegen] deaktiviert ist, wird der Leuchteffekt gestoppt.
- Nachdem die Schüler ihr Projekt erstellt haben, sollen sie es „ Drive Until 2 “ nennen und auf ihrem Gerät speichern. See the Der Abschnitt „Öffnen und Speichern“ der VEXcode GO VEX-Bibliothek enthält gerätespezifische Schritte zum Speichern eines VEXcode GO-Projekts.
- Lassen Sie die Schüler ihre Codebasis auf dem Feld platzieren, um ihr Projekt zu testen.
Platziere das Hindernis auf dem Feld und die Codebasis auf dem „X“ - Sobald die Codebasis im Feld platziert ist, lassen Sie die Schüler in VEXcode GO „Start“ auswählen, um ihre Projekte zu testen.
Wählen Sie „Start“, um das Projekt zu testen - Nachdem die Code Base gefahren ist, bis sie das Hindernis erkennt, sollte der LED-Bumper 3 Sekunden lang rot leuchten, um zu signalisieren, dass er ein Objekt erkannt hat. Die Schüler sollten das Objekt entfernen, wenn der LED-Stoßfänger grün leuchtet.
- Sagen Sie den Schülern, dass sie nach dem Entfernen des Objekts die Schaltfläche „Stopp“ in der Symbolleiste auswählen müssen.
Stopp auswählen- Wenn die Schüler schnell mit dem Erstellen und Testen ihrer Projekte fertig sind, lassen Sie sie zusätzliche Drivetrain-Blöcke zu ihrem Projekt hinzufügen, damit die Codebasis zur Startposition zurückkehrt. Ermutigen Sie sie, mit den verschiedenen Pfaden zu experimentieren, die die Codebasis nehmen kann, um zum Ausgangspunkt zurückzukehren.
- ErleichternErleichtern Sie den Schülern das Testen ihrer Projekte und wechseln Sie sich im Feld ab. Stellen Sie den Schülern während des Tests Fragen zum Augensensor und dazu, wie sich die Codebasis basierend auf den Blöcken in ihrem Projekt bewegt.
- Wie signalisiert Ihre Codebasis, dass sie ein Objekt erkannt hat? Welche Blöcke verwenden Sie, um dies zu erreichen?
- Wie weit ist die Code Base vom Hindernis entfernt, wenn sie anhält? Kannst du es mir mit deinen Händen zeigen?
- Welche Blöcke in unserem Projekt weisen die Codebasis an, mit dem Fahren aufzuhören?
Review the Using the VEX GO Sensors and the Coding with the VEX GO LED Bumper articles for information on the LED Bumper to help students who need additional support to understand how the sensors work in their project.
- ErinnernErinnern Sie die Schüler daran, dass sie ihr Projekt überprüfen und mit dem Bild des Projekts vergleichen sollten, bevor sie es testen. Wenn ein Schüler das Projekt in VEXcode GO erstellt hat, kann sein Partner den Code überprüfen, bevor er die Codebasis auf dem Feld platziert und das Projekt startet.
- FrageFragen Sie die Schüler: Wie erforschen Wissenschaftler weit entfernte Orte?
Wissenschaftler und Ingenieure entwickeln unterschiedliche Robotertypen zur Erkundung von Bereichen, die für den Menschen zu weit entfernt oder zu gefährlich sind. Wissenschaftler entwickeln Rover zur Erforschung des Mars, unbemannte U-Boote zur Untersuchung der Ozeane und fliegen sogar Drohnen in aktive Vulkane, um Daten zu sammeln!
- Wie könnten Wissenschaftler ein U-Boot so programmieren, dass es mithilfe von Augensensoren den Ozean erkundet?
- Wie könnten Wissenschaftler die Augensensoren einer Drohne zur Erforschung eines Vulkans nutzen? Welchen Befehl würden sie verwenden, um die Drohne fliegen zu lassen, bis sie in der Nähe der Vulkanwände ist?
- Für welche anderen Aufgaben könnten Wissenschaftler einen Marsrover mit einem Augensensor programmieren?