
Brincadeira
Parte 1 - Passo a Passo
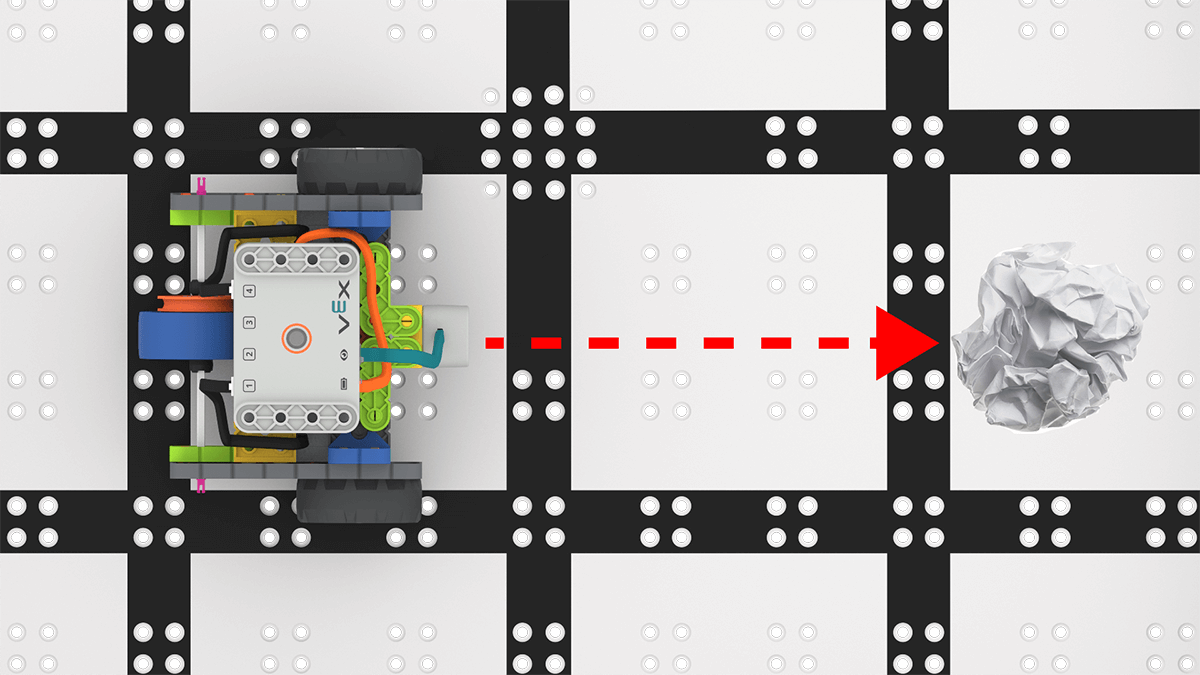
- InstruaInstrua os alunos que vão construir um projeto no VEXcode GO para conduzir a Base de Código até que esta detete um objeto na área de aterragem em Marte (o Campo). A animação abaixo mostra como o Code Base se irá mover quando este projeto for iniciado.
Certifique-se de que utiliza objetos claros ou brancos para representar o "obstáculo" na área de aterragem, de modo a garantir que o sensor ocular irá detetar esse objeto. Os alunos podem remover o obstáculo assim que a Base de Código chegar até ele e parar.
Arquivo de vídeo - ModeloModelo para os alunos como construir o projeto no VEXcode GO e testar os seus projetos no Campo.
- Comece por mostrar aos alunos como ligar o cérebro da sua base de código ao dispositivo no VEXcode GO. Como as etapas de ligação variam entre dispositivos, see the Connecting articles of the VEXcode GO VEX Library para os passos específicos para ligar o VEX GO Brain ao seu computador ou tablet.
- Também terão de configurar o VEXCode GO para o Code Base. If necessary, model the steps from the Configure a Code Base VEX Library article and ensure students can see the Drivetrain blocks in the Toolbox.
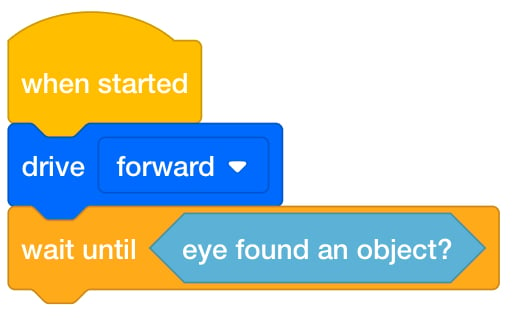
- Arraste um bloco [Drive] para o ambiente de trabalho e anexe-o ao bloco {When started}.

Adicionar [Drive] bloco - De seguida, peça aos alunos que adicionem um bloco [Aguarde até]. De seguida, arraste um bloco<Found object> dentro do espaço hexagonal dentro do bloco [Aguarde até].
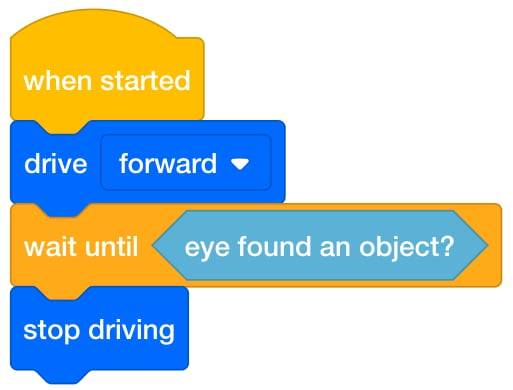
Adicione [Aguarde até] com <Found object> - Peça aos alunos que adicionem um bloco [Parar de conduzir] para que o Code Base pare de conduzir quando um objeto é detetado.
Adicionar [Parar de conduzir] - Depois de os alunos construírem o seu projeto, peça-lhes que nomeiem o projeto como Drive Until 1 e que o guardem nos seus dispositivos. See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
Modelo para os alunos testarem o seu projeto no terreno.
- Primeiro, mostre-lhes como colocar o obstáculo e a Base de Código no quadrado com o “X”.
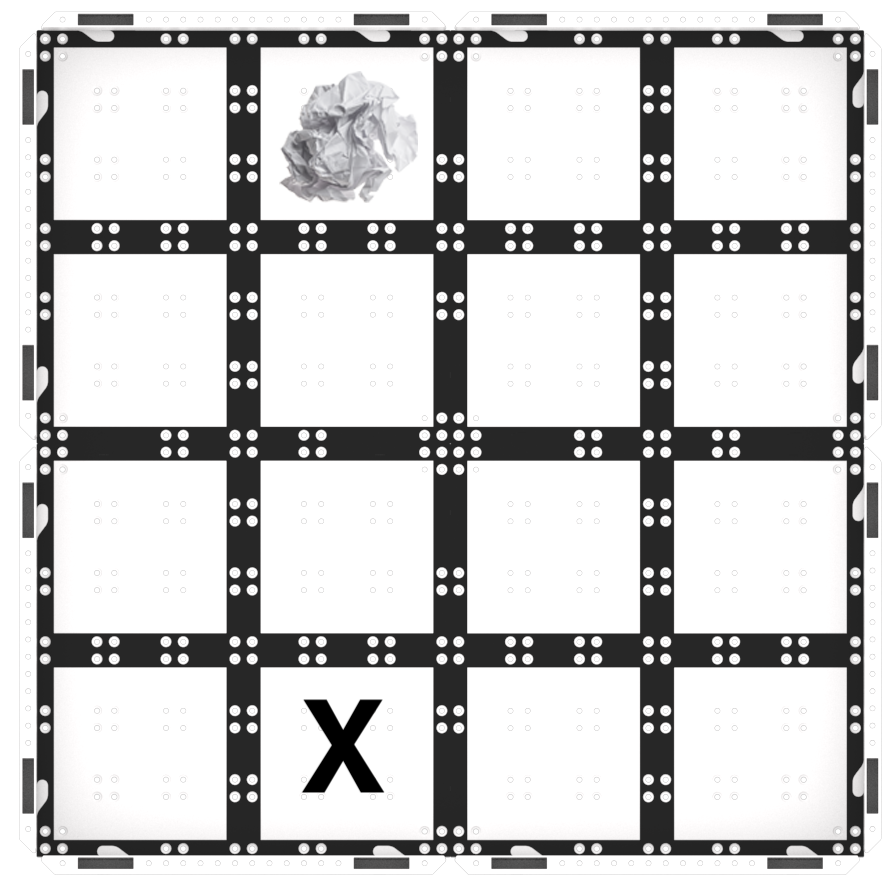
Coloque o Obstáculo no Campo e a Base do Código no “X” - Certifique-se de que o sensor ocular, localizado na parte frontal do robô, está virado para o obstáculo.
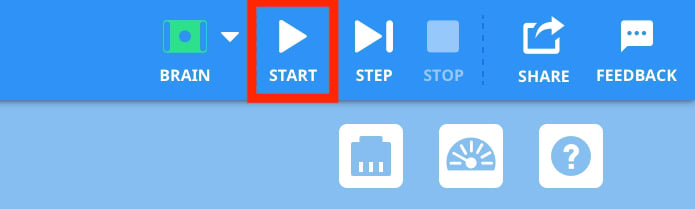
Sensor ocular enfrenta obstáculo - Assim que a Base de Código for colocada no Campo, peça aos alunos que selecionem 'Iniciar' no VEXcode GO para testar os seus projetos.
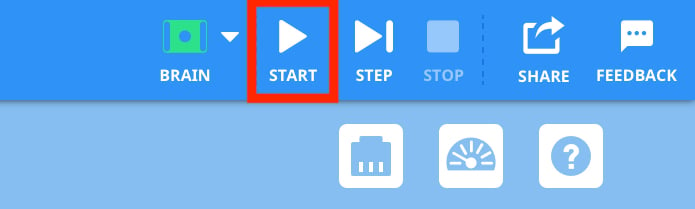
Selecione Iniciar para testar o projeto - Após a conclusão do projeto, os alunos terão de selecionar o botão “Parar” na barra de ferramentas.
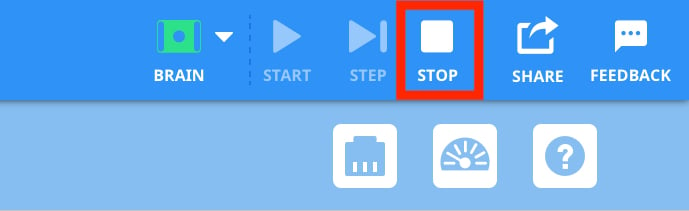
Selecione Parar - Para grupos que terminam mais cedo e precisam de desafios adicionais, peça-lhes que movam o obstáculo para um novo local e testem o projeto novamente.
- FacilitarFacilitar uma conversa com os alunos enquanto testam os seus projetos.
- Como se move o robô Code Base neste projeto? Pode mostrar-me com as mãos?
- Como é que o Code Base sabia quando parar?
- Como sabe quando há algo à sua frente?
- Se fosse o Código Base, qual dos seus sentidos o ajudaria a dirigir-se para um objeto?
- RecordarLembre os alunos que mesmo sendo um projeto pequeno, podem cometer erros e pode ser necessária mais do que uma tentativa para que o seu projeto funcione com sucesso. Para incentivar os alunos a aceitar os erros ao longo do percurso, coloque questões como:
- Que erro cometeu que lhe ensinou alguma coisa?
- Que parte do laboratório o fez pensar muito?
- Foi difícil alinhar a base de código para que o sensor ocular ficasse virado para o objeto? Que estratégia utilizou para o alinhar?
- PeçaPeça aos alunos para nomearem ou descreverem um dispositivo ou objeto que eles acham que utiliza um sensor ocular. Pergunte se já ouviram falar de um aspirador robot. Conseguem descrever como os comandos [Drive], [Wait Until] e <Found object> podem funcionar com este dispositivo?
Discussão em grupo no intervalo & do jogo
Assim que cada grupo terminar de testar os seus projetos, reúna-se para uma breve conversa .
- Desenhe o seu ecrã para que todos os alunos possam ver o código ou leve os alunos para uma área central onde todos possam ver o código no seu tablet ou computador.
- Inicie o projeto Drive Until 1 e peça aos alunos que observem o código à medida que o projeto é executado e descrevam o que veem. Peça aos alunos que descrevam o que acontece ao recurso de destaque e identifiquem que este permanece no bloco [Aguardar até] até que o Sensor ocular detete um objeto.
- Como se move o destaque verde quando iniciamos o nosso projeto?
- Porque é que acha que o destaque verde faz uma pausa no bloco [Aguarde até]?
- O que acha que nos diz o destaque?
Parte 2 - Passo a Passo
- InstruaInstrua os alunos que irão adicionar ao seu projeto para que a Base de Código sinalize quando o Sensor ocular deteta um obstáculo na zona de aterragem em Marte. Os alunos irão adicionar um sensor LED de pára-choques ao robô e, em seguida, adicionarão blocos [Definir cor do pára-choques] e [Aguardar] ao projeto para criar um efeito de sinal.
À medida que testam os seus projetos, removerão o obstáculo quando o robô brilhar. A animação abaixo mostra como o Code Base se irá mover quando o projeto for iniciado. Assim que o LED Bumper na Base de Código acender, os alunos terão de remover o obstáculo do Campo. Isso também é mostrado na animação.
Arquivo de vídeo - ModeloModelo para os alunos como adicionar o sensor LED Bumper à sua base de código.
- Há muitas formas pelas quais os alunos podem adicionar o LED Bumper à base de código. Abaixo está uma forma rápida e fácil de o adicionar ao topo da base de código utilizando apenas 2 pinos vermelhos e o sensor. O LED Bumper Sensor terá de ser ligado à porta 2 no GO Brain.
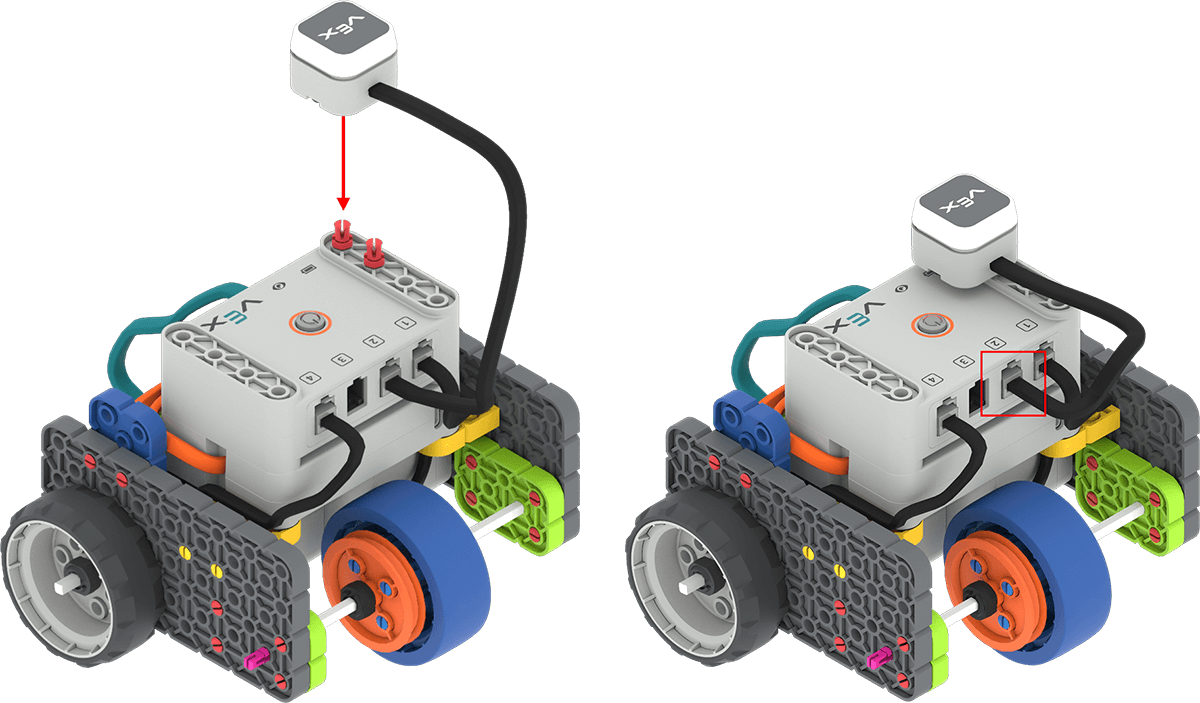
Adicione sensor de pára-choques LED e ligue à porta 2 Modele como desenvolver o seu projeto VEXcode GO existente e testá-lo no terreno.
- If students need to open their Drive Until 1 project, model the device-specific steps, as shown in the VEX Library articles in the Open and Save section.
-
Peça aos alunos que adicionem blocos aos seus projetos VEXcode GO para recriar o código da imagem abaixo. Os novos blocos terão o LED Bumper a brilhar a vermelho durante 3 segundos para sinalizar que detetou um objeto. A caixa vermelha indica os novos blocos que necessitam de ser adicionados ao projeto.
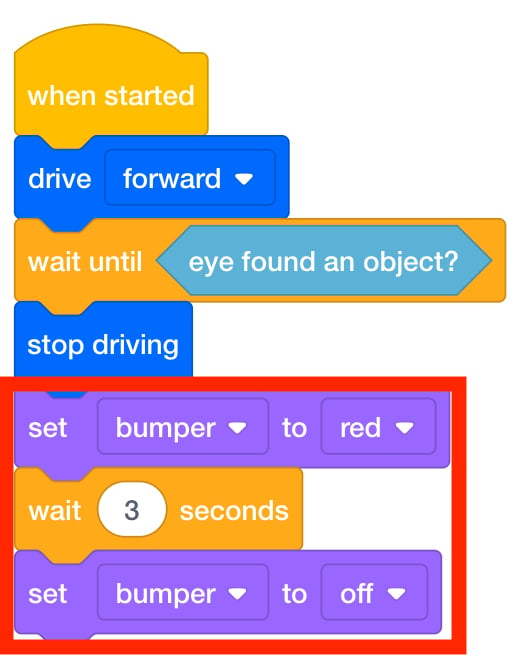
Adicione blocos para que o LED Bumper brilhe - O bloco [Definir cor do pára-choques] definido para vermelho fará com que o LED do pára-choques brilhe em vermelho.
- O bloco [Wait] aguarda um período de tempo específico antes de passar para o bloco seguinte.
- O bloco [Set bumper color] desativado irá interromper o efeito de brilho.
- Depois de os alunos construírem o seu projeto, peça-lhes que nomeiem o seu projeto como Drive Until 2 e que o guardem nos seus dispositivos. See the Secção Abrir e Guardar da Biblioteca VEXcode GO VEX para os passos específicos do dispositivo para guardar um projeto VEXcode GO.
- Peça aos alunos que coloquem a sua base de código no campo para testar o seu projeto.
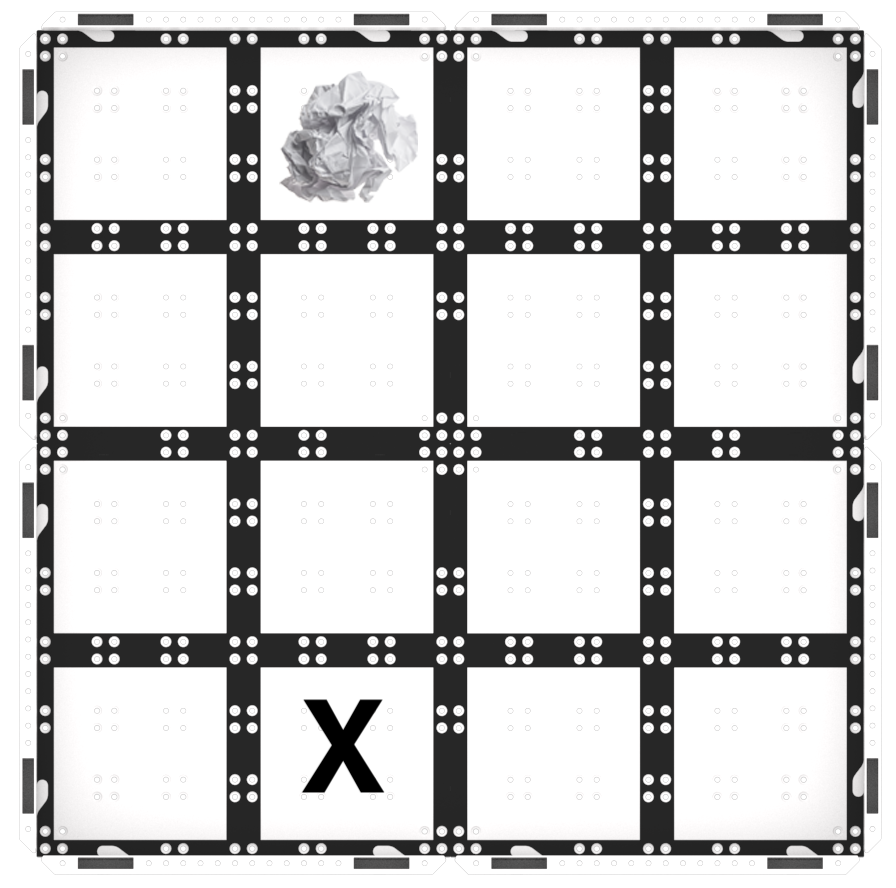
Coloque o Obstáculo no Campo e a Base do Código no “X” - Assim que a Base de Código for colocada no Campo, peça aos alunos que selecionem 'Iniciar' no VEXcode GO para testar os seus projetos.
Selecione Iniciar para testar o projeto - Depois de o Code Base se mover até detetar o obstáculo, o LED Bumper deve brilhar a vermelho durante 3 segundos para sinalizar que detetou um objeto. Os alunos devem remover o objeto quando o LED Bumper brilhar a verde.
- Diga aos alunos que terão de selecionar o botão “Parar” na barra de ferramentas após removerem o objeto.
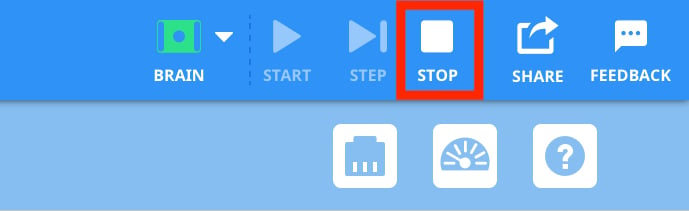
Selecione Parar - Se os alunos terminarem de construir e testar os seus projetos rapidamente, peça-lhes que adicionem blocos Drivetrain adicionais ao projeto, para que a Base de Código volte à posição inicial. Incentive-os a experimentar os diferentes caminhos que a Base de Código pode seguir para voltar ao ponto de partida.
- FacilitarFacilitar que os alunos testem os seus projetos e se revezem no terreno. Enquanto os alunos testam, faça perguntas sobre o sensor ocular e como a base de código se moverá com base nos blocos do projeto.
- Como é que a sua Base de Código sinalizará que detetou um objeto? Que blocos está a usar para fazer isso?
- A que distância do obstáculo está a Base de Código quando deixa de conduzir? Pode mostrar-me com as mãos?
- Que blocos do nosso projeto dizem ao Code Base para parar de conduzir?
Review the Using the VEX GO Sensors and the Coding with the VEX GO LED Bumper articles for information on the LED Bumper to help students who need additional support to understand how the sensors work in their project.
- LembrarLembrar aos alunos que devem verificar o seu projeto e compará-lo com a imagem do projeto, antes de testar. Se um aluno construiu o projeto no VEXcode GO, o seu parceiro poderá verificar o código, antes de colocar o Código Base no Campo e iniciar o projeto.
- PerguntaPergunta aos alunos: como é que os cientistas exploram lugares distantes?
Cientistas e engenheiros projetam diferentes tipos de robôs para explorar áreas demasiado distantes ou demasiado perigosas para serem investigadas por humanos. Os cientistas projetam veículos espaciais para explorar Marte, submarinos não tripulados para investigar o oceano e até pilotam drones até vulcões ativos para recolher dados!
- Como poderiam os cientistas codificar um submarino para usar sensores oculares para explorar o oceano?
- Como poderiam os cientistas usar sensores oculares num drone para ajudar a explorar um vulcão? Que comando utilizariam para fazer o drone voar até perto das paredes do vulcão?
- Que outras tarefas poderiam os cientistas codificar um rover de Marte para realizar com um sensor ocular?