
Jouer
Partie 1 – Étape par étape
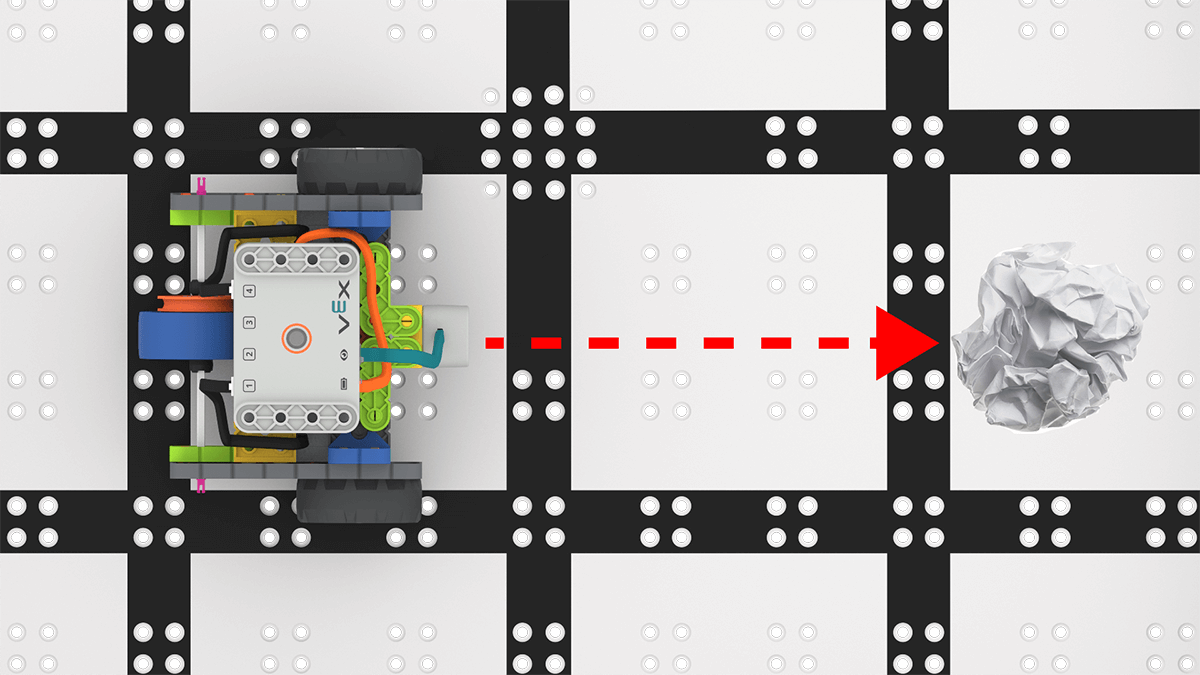
- InstruireDites aux élèves qu'ils vont créer un projet dans VEXcode GO pour piloter la base de code jusqu'à ce qu'elle détecte un objet sur la zone d'atterrissage de Mars (le champ). Cette animation ci-dessous montre comment la base de code évoluera lorsque ce projet sera démarré.
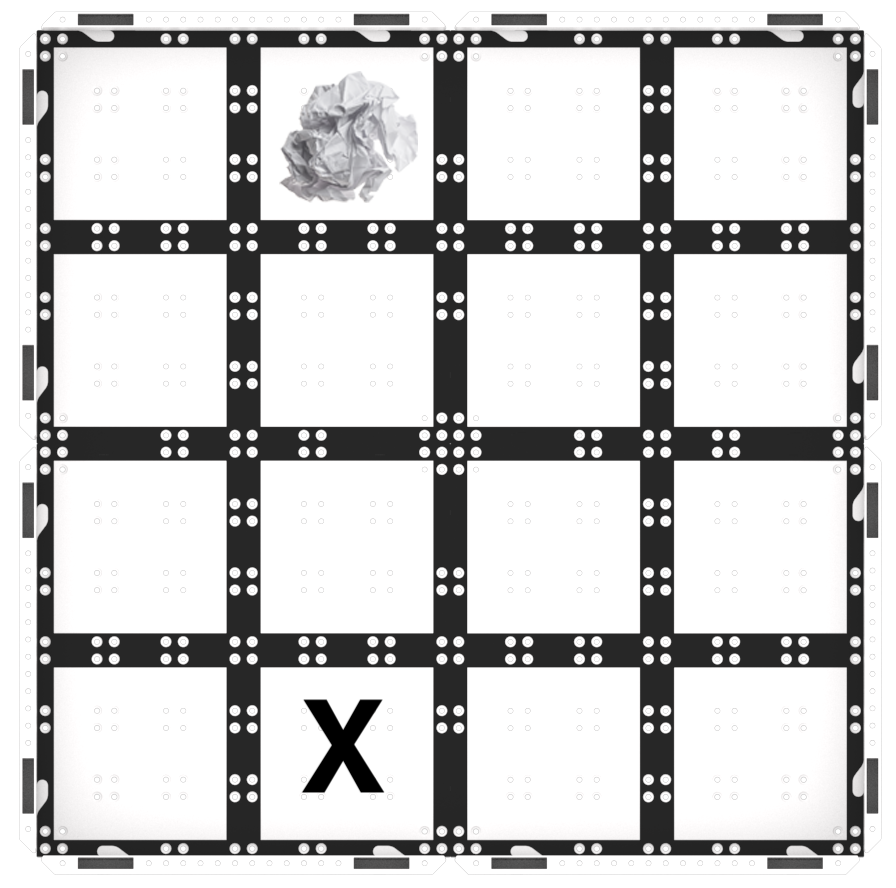
Assurez-vous d'utiliser des objets clairs ou blancs pour représenter « l'obstacle » sur la zone d'atterrissage afin de garantir que le capteur oculaire détectera cet objet. Les étudiants peuvent retirer l'obstacle une fois que la base de code s'en approche et s'arrête.
Fichier vidéo - ModèleModèle permettant aux étudiants de savoir comment construire le projet dans VEXcode GO et tester leurs projets sur le terrain.
- Commencez par montrer aux élèves comment connecter le cerveau de leur base de code à leur appareil dans VEXcode GO. Parce que les étapes de connexion varient selon les appareils, see the Connecting articles of the VEXcode GO VEX Library pour les étapes spécifiques pour connecter le VEX GO Brain à votre ordinateur ou tablette.
- Ils devront également configurer VEXCode GO pour la base de code. If necessary, model the steps from the Configure a Code Base VEX Library article and ensure students can see the Drivetrain blocks in the Toolbox.
- Faites glisser un bloc [Drive] dans l’espace de travail et attachez-le au bloc {When started}.

Ajouter le bloc [Drive] - Demandez ensuite aux élèves d’ajouter un bloc [Attendre jusqu’à]. Ensuite, faites glisser un bloc<Found object> à l’intérieur de l’espace hexagonal dans le bloc [Attendre jusqu’à].
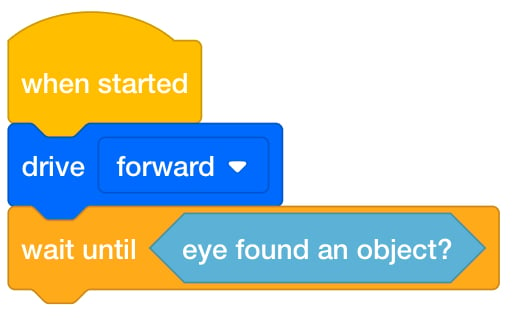
Ajouter [Attendre jusqu'à] avec <Found object> - Demandez aux élèves d’ajouter un bloc [Arrêter de conduire] pour que la base de code arrête de conduire lorsqu’un objet est détecté.
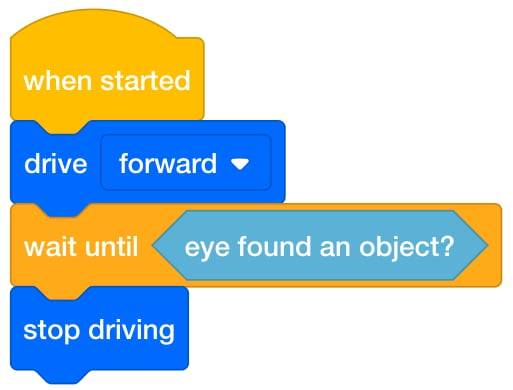
Ajouter [Arrêter de conduire] - Une fois que les élèves ont construit leur projet, demandez-leur de nommer leur projet Drive Until 1 et de l'enregistrer sur leur appareil. See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
Modèle permettant aux étudiants de tester leur projet sur le terrain.
- Tout d’abord, montrez-leur comment placer l’obstacle et la base de code sur le carré avec le « X ».
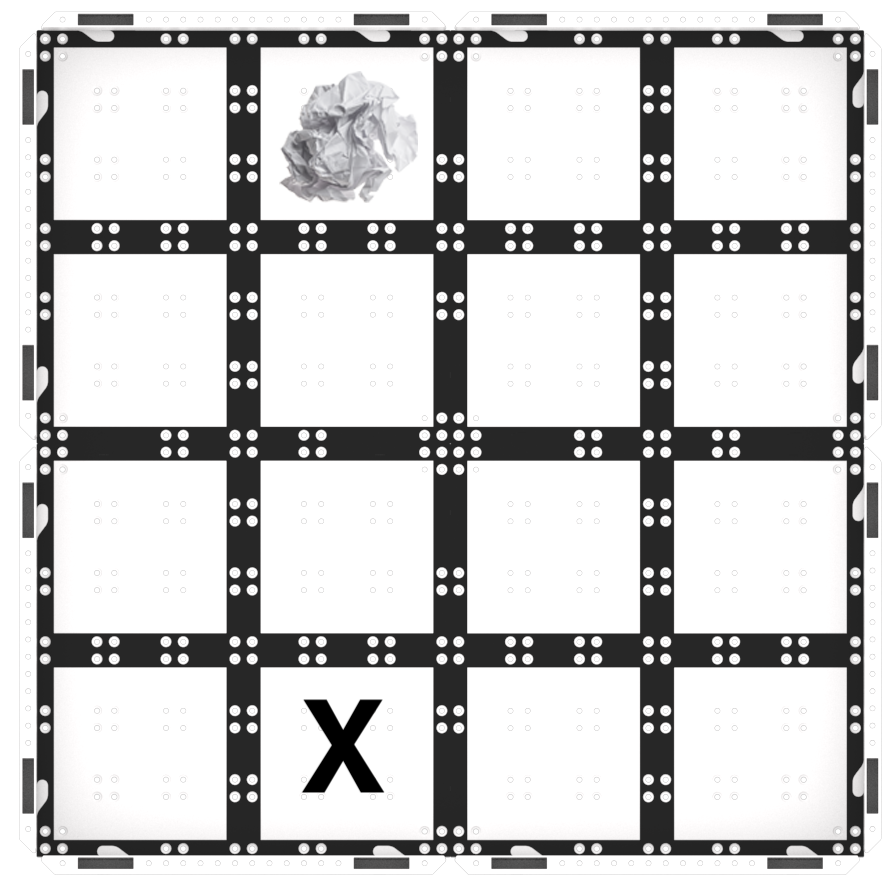
Placez l'obstacle sur le terrain et la base de code sur le « X » - Assurez-vous que le capteur oculaire, situé à l’avant du robot, fait face à l’obstacle.
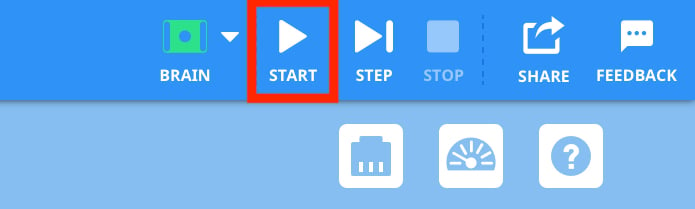
Le capteur oculaire fait face à l'obstacle - Une fois la base de code placée sur le terrain, demandez aux élèves de sélectionner « Démarrer » dans VEXcode GO pour tester leurs projets.
Sélectionnez Démarrer pour tester le projet - Une fois le projet terminé, les étudiants devront sélectionner le bouton « Arrêter » dans la barre d’outils.
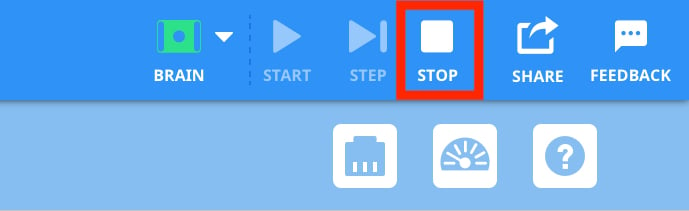
Sélectionner Arrêter - Pour les groupes qui terminent tôt et ont besoin de défis supplémentaires, demandez-leur de déplacer l’obstacle vers un nouvel emplacement et de tester à nouveau leur projet.
- FaciliterFaciliter une conversation avec les élèves pendant qu'ils testent leurs projets.
- Comment le robot Code Base se déplace-t-il dans ce projet ? Peux-tu me montrer avec tes mains ?
- Comment la base de code a-t-elle su quand s’arrêter ?
- Comment savez-vous quand il y a quelque chose devant vous ?
- Si vous étiez la base du code, lequel de vos sens vous aiderait à conduire jusqu'à un objet ?
- RappelRappelez aux élèves que même s’il s’agit d’un petit projet, ils peuvent faire des erreurs et qu’il faudra peut-être plus d’un essai pour que leur projet fonctionne avec succès. Afin d'encourager les élèves à accepter les erreurs qu'ils commettent en cours de route, posez-leur des questions telles que :
- Quelle erreur avez-vous commise qui vous a appris quelque chose ?
- Quelle partie du laboratoire vous a fait beaucoup réfléchir ?
- A-t-il été difficile d’aligner la base de code de manière à ce que le capteur oculaire soit face à l’objet ? Quelle stratégie avez-vous utilisée pour l'aligner ?
- DemanderDemandez aux élèves de nommer ou de décrire un appareil ou un objet qui, selon eux, utilise un capteur oculaire. Demandez-leur s’ils ont entendu parler d’un aspirateur robot ? Peuvent-ils décrire comment les commandes [Drive], [Wait until] et <Found object> pourraient fonctionner avec cet appareil ?
Pause à mi-jeu & Discussion de groupe
Dès que chaque groupe a fini de tester ses projets, réunissez-vous pour une brève conversation.
- Projetez votre écran pour que tous les élèves puissent voir le code, ou amenez les élèves dans une zone centrale où ils peuvent tous voir le code sur votre tablette ou votre ordinateur.
- Démarrez le projet Drive Until 1 et demandez aux élèves de regarder le code pendant que le projet s'exécute et de décrire ce qu'ils voient. Demandez aux élèves de décrire ce qui se passe avec la fonction de surbrillance et d’indiquer qu’elle reste sur le bloc [Attendre jusqu’à] jusqu’à ce que le capteur oculaire détecte un objet.
- Comment se déplace le surlignage vert lorsque nous démarrons notre projet ?
- Pourquoi pensez-vous que le surlignage vert s'arrête sur le bloc [Attendre jusqu'à] ?
- Que pensez-vous que ce moment fort nous révèle ?
Partie 2 – Étape par étape
- InstruireExpliquez aux élèves qu'ils ajouteront à leur projet des éléments afin que la base de code signale lorsque le capteur oculaire a détecté un obstacle dans la zone d'atterrissage sur Mars. Les élèves ajouteront un capteur de pare-chocs à LED à leur robot, puis ajouteront les blocs [Définir la couleur du pare-chocs] et [Attendre] à leur projet pour créer un effet de signal.
En testant leurs projets, ils retireront l'obstacle lorsque le robot brillera. L'animation ci-dessous montre comment la base de code se déplacera lorsque le projet sera démarré. Une fois que le pare-chocs LED de la base de code s'allume, les élèves devront retirer l'obstacle du terrain. Ceci est également montré dans l'animation.
Fichier vidéo - ModèleModèle pour les étudiants expliquant comment ajouter le capteur de pare-chocs LED à leur base de code.
- Il existe de nombreuses façons pour les étudiants d'ajouter le pare-chocs LED à la base de code. Vous trouverez ci-dessous un moyen rapide et simple de l'ajouter en haut de la base de code en utilisant seulement 2 broches rouges et le capteur. Le capteur de pare-chocs LED devra être connecté au port 2 du GO Brain.
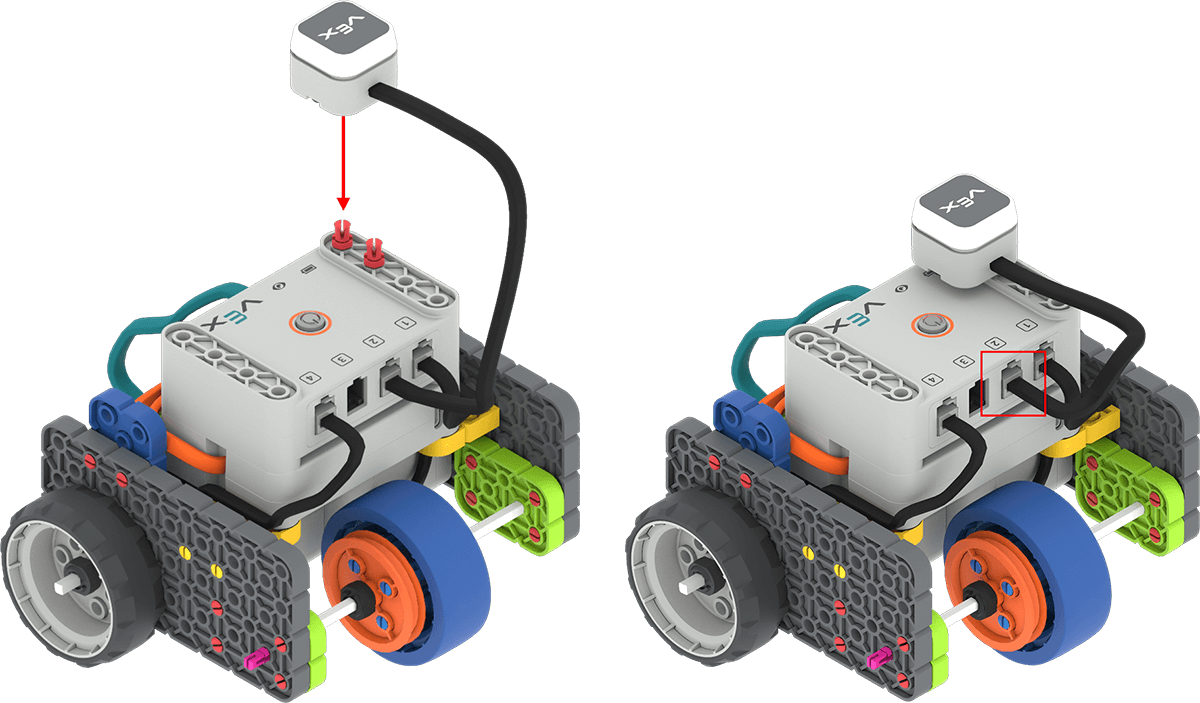
Ajoutez un capteur de pare-chocs à LED et connectez-le au port 2 Modélisez comment développer votre projet VEXcode GO existant et testez-le sur le terrain.
- If students need to open their Drive Until 1 project, model the device-specific steps, as shown in the VEX Library articles in the Open and Save section.
-
Demandez aux élèves d’ajouter des blocs à leurs projets VEXcode GO pour recréer le code dans l’image ci-dessous. Les nouveaux blocs auront le pare-chocs LED qui s'allumera en rouge pendant 3 secondes pour signaler qu'il détecte un objet. La case rouge indique les nouveaux blocs qui doivent être ajoutés au projet.
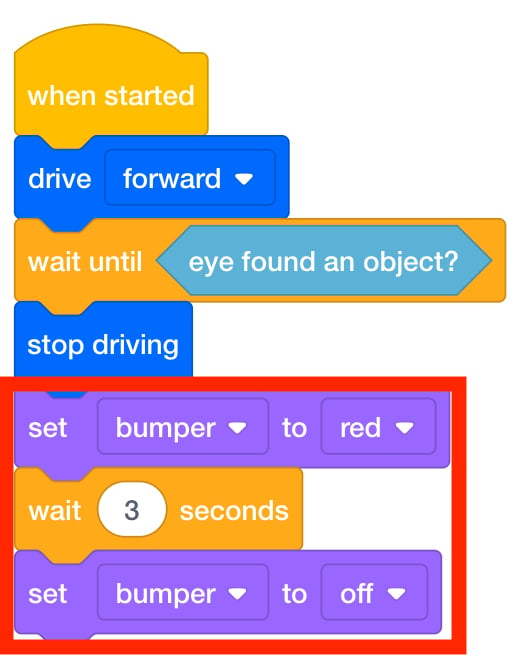
Ajoutez des blocs pour que le pare-chocs LED s'allume - Le bloc [Définir la couleur du pare-chocs] défini sur rouge fera briller le pare-chocs LED en rouge.
- Le bloc [Attendre] attend un laps de temps spécifique avant de passer au bloc suivant.
- Le bloc [Définir la couleur du pare-chocs] désactivé arrêtera l'effet de lueur.
- Une fois que les élèves ont construit leur projet, demandez-leur de nommer leur projet Drive Until 2 et de l'enregistrer sur leur appareil. See the Section Ouvrir et enregistrer de la bibliothèque VEXcode GO VEX pour connaître les étapes spécifiques à l'appareil pour enregistrer un projet VEXcode GO.
- Demandez aux élèves de placer leur base de code sur le terrain pour tester leur projet.
Placez l'obstacle sur le terrain et la base de code sur le « X » - Une fois la base de code placée sur le terrain, demandez aux élèves de sélectionner « Démarrer » dans VEXcode GO pour tester leurs projets.
Sélectionnez Démarrer pour tester le projet - Une fois que le Code Base a roulé jusqu'à ce qu'il détecte l'obstacle, le pare-chocs LED doit s'allumer en rouge pendant 3 secondes pour signaler qu'il détecte un objet. Les élèves doivent retirer l’objet lorsque le pare-chocs LED s’allume en vert.
- Dites aux élèves qu’ils devront sélectionner le bouton « Arrêter » dans la barre d’outils après avoir supprimé l’objet.
Sélectionner Arrêter - Si les élèves terminent rapidement la construction et le test de leurs projets, demandez-leur d'ajouter des blocs Drivetrain supplémentaires à leur projet pour que la base de code revienne à la position de départ. Encouragez-les à expérimenter les différents chemins que la base de code peut emprunter pour revenir au point de départ.
- FaciliterFaciliter les étudiants à tester leurs projets et à prendre leur tour sur le terrain. Pendant que les élèves effectuent les tests, posez-leur des questions sur le capteur oculaire et sur la manière dont la base de code se déplacera en fonction des blocs de leur projet.
- Comment votre base de code va-t-elle signaler qu’elle a détecté un objet ? Quels blocs utilisez-vous pour y parvenir ?
- À quelle distance de l'obstacle se trouve la base de code lorsqu'elle arrête de rouler ? Peux-tu me montrer avec tes mains ?
- Quels blocs de notre projet indiquent à la base de code d’arrêter de conduire ?
Review the Using the VEX GO Sensors and the Coding with the VEX GO LED Bumper articles for information on the LED Bumper to help students who need additional support to understand how the sensors work in their project.
- RappelRappelez aux élèves qu'ils doivent vérifier leur projet et le comparer à l'image du projet, avant de le tester. Si un étudiant a construit le projet dans VEXcode GO, son partenaire peut vérifier le code avant de placer la base de code sur le terrain et de démarrer le projet.
- DemandezDemandez aux élèves comment les scientifiques explorent-ils des endroits lointains ?
Les scientifiques et les ingénieurs conçoivent différents types de robots pour explorer des zones trop éloignées ou trop dangereuses pour être étudiées par les humains. Les scientifiques conçoivent des rovers pour explorer Mars, des sous-marins sans pilote pour étudier l'océan et même des drones dans des volcans actifs pour recueillir des données !
- Comment les scientifiques pourraient-ils coder un sous-marin pour utiliser des capteurs oculaires pour explorer l'océan ?
- Comment les scientifiques pourraient-ils utiliser des capteurs oculaires sur un drone pour aider à explorer un volcan ? Quelle commande utiliseraient-ils pour faire voler le drone jusqu'à ce qu'il soit près des parois du volcan ?
- Quelles autres tâches les scientifiques pourraient-ils coder pour qu'un rover martien puisse les accomplir avec un capteur oculaire ?