
পাঠ ৩: প্রকল্প-পরবর্তী সারাংশ
-
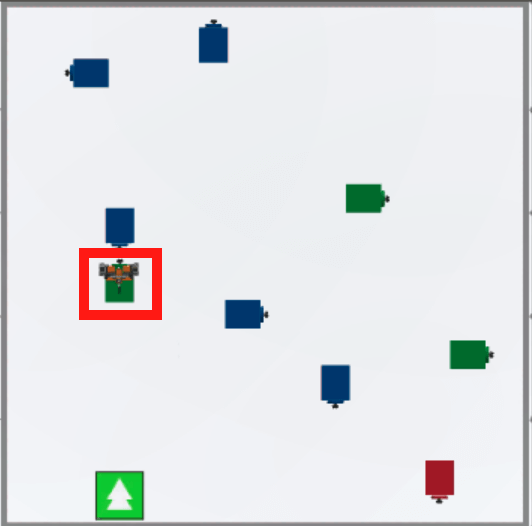
যখন এই প্রকল্পটি চালানো হয়, VR রোবট প্রথম সবুজ ডিস্কের সাথে সংঘর্ষের সময়ও এগিয়ে যেতে থাকে।
-
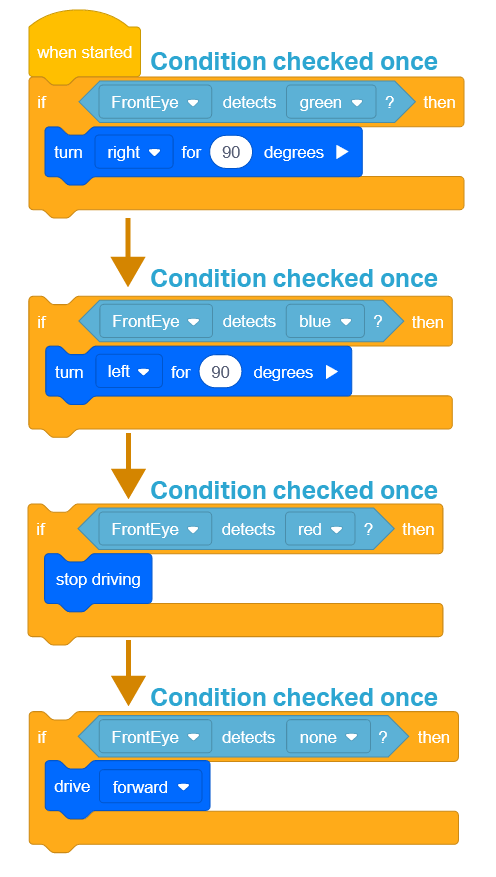
এই প্রজেক্টটি শুধুমাত্র VR রোবটকে প্রজেক্টের শুরুতে একবার প্রতিটি [যদি তাহলে] ব্লকের অবস্থা পরীক্ষা করার নির্দেশ দেয়।
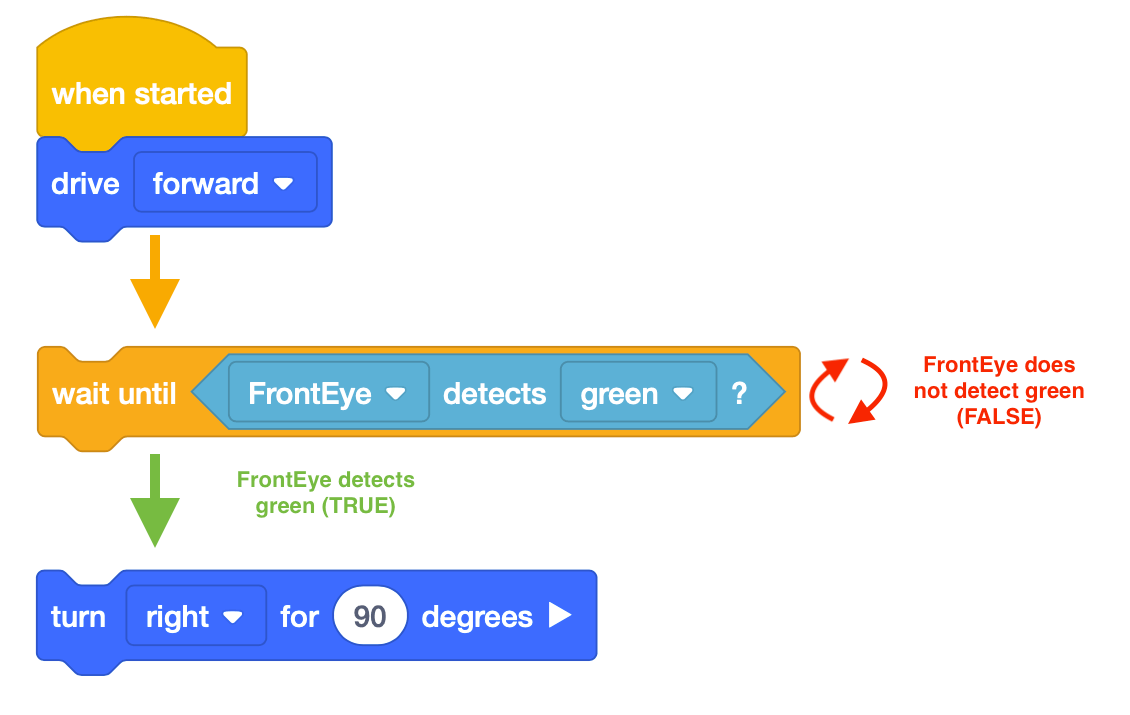
- [যদি তারপর] ব্লকটি [অপেক্ষা করুন] ব্লক থেকে আলাদা।
-
[অপেক্ষা করুন] ব্লকের জন্য VR রোবট দ্বারা সিদ্ধান্ত নেওয়ার প্রয়োজন হয় না। শর্তটি সত্য হলে, [অপেক্ষা করুন] ব্লকটি স্ট্যাকের পরবর্তী ব্লকটি চালায়। শর্তটি মিথ্যা হলে, [অপেক্ষা করুন] ব্লকটি শর্তটি সত্য না হওয়া পর্যন্ত অপেক্ষা করতে থাকে এবং বাকি প্রজেক্টকে চলা থেকে বন্ধ করে দেয়।
-
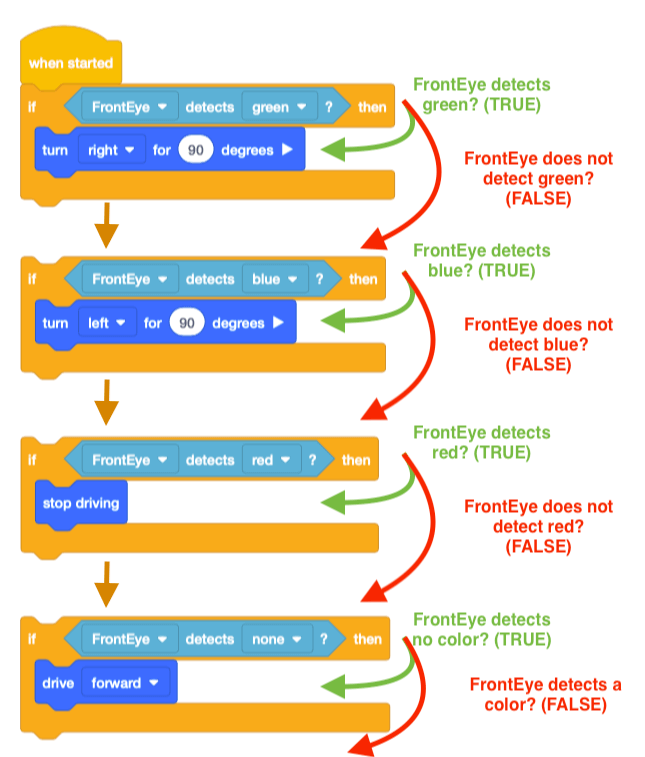
[যদি তাহলে] ব্লকের জন্য VR রোবটকে সিদ্ধান্ত নিতে হবে। যদি শর্তটি সত্য হয় তবে সি ব্লকের ভিতরের ব্লকগুলি চালানো হয়। যদি কন্ডিশনটি FALSE হয়, তাহলে [If then] C ব্লকের ভিতরের ব্লকগুলি বাদ দেওয়া হয়।
-
- VR রোবটটি এগিয়ে যেতে থাকবে যেহেতু শেষ [যদি তারপর] স্ট্যাকের ব্লকটি সত্য হিসাবে রিপোর্ট করা হয়েছিল এবং প্রকল্পের শুরুতে অন্য সমস্ত ব্লকগুলিকে মিথ্যা হিসাবে রিপোর্ট করা হয়েছিল৷
- পরবর্তী পাঠে যাওয়ার আগে প্রকল্পটি সংরক্ষণ করুন।