
Lección 3: Resumen posterior al proyecto
-
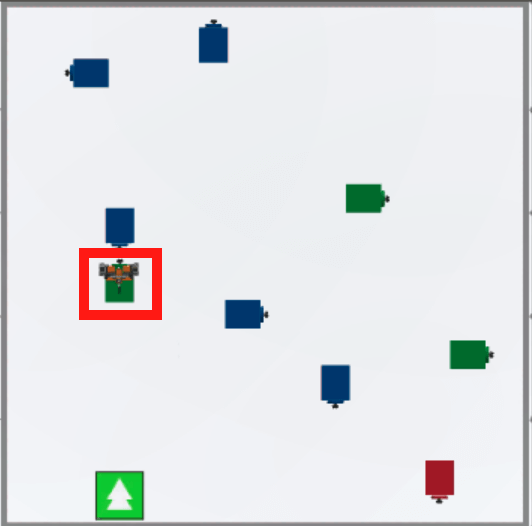
Cuando se ejecuta este proyecto, el robot VR continúa avanzando incluso cuando choca con el primer disco verde.
-
Este proyecto solo indica al robot de realidad virtual que verifique las condiciones de cada bloque [If then] una vez al comienzo del proyecto.
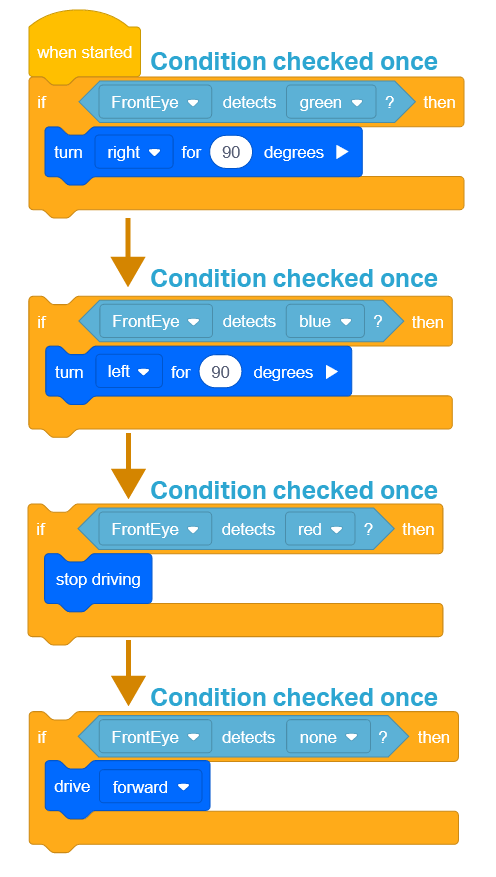
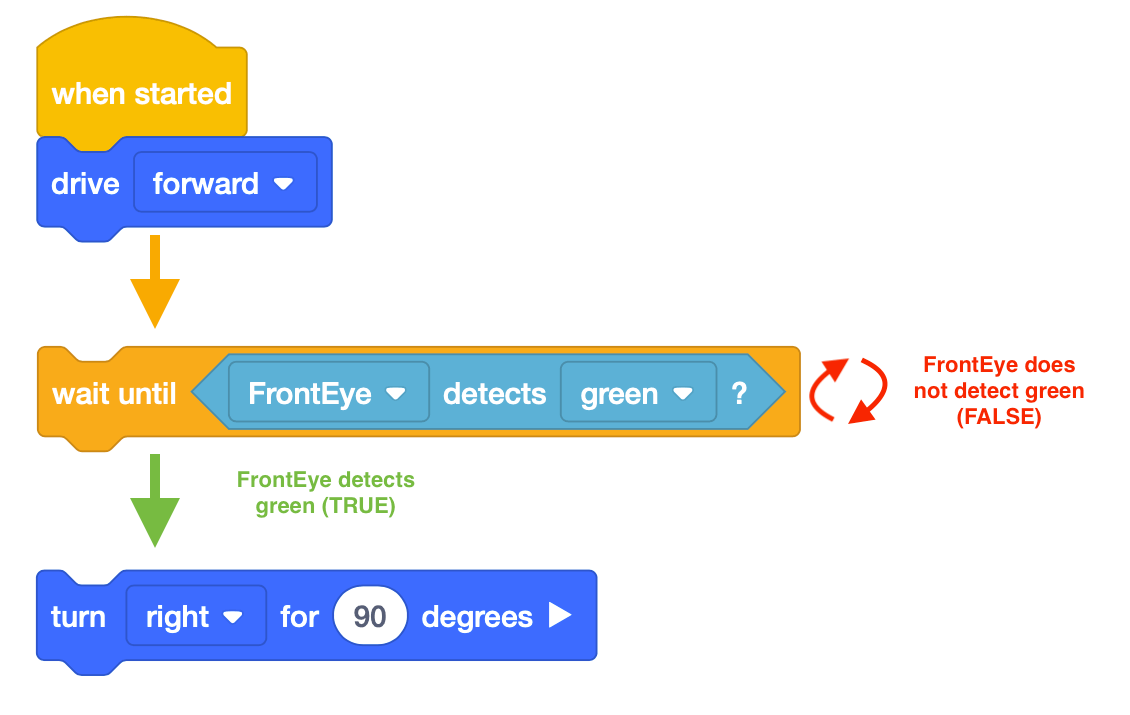
- El bloque [If then] es diferente del bloque [Wait until].
-
Los bloques [Esperar hasta] no requieren que el robot de realidad virtual tome una decisión. Cuando la condición es VERDADERA, el bloque [Wait until] ejecuta el siguiente bloque de la pila. Cuando la condición es FALSA, el bloque [Esperar hasta] continúa esperando hasta que la condición sea VERDADERA e impide que el resto del proyecto se ejecute.
-
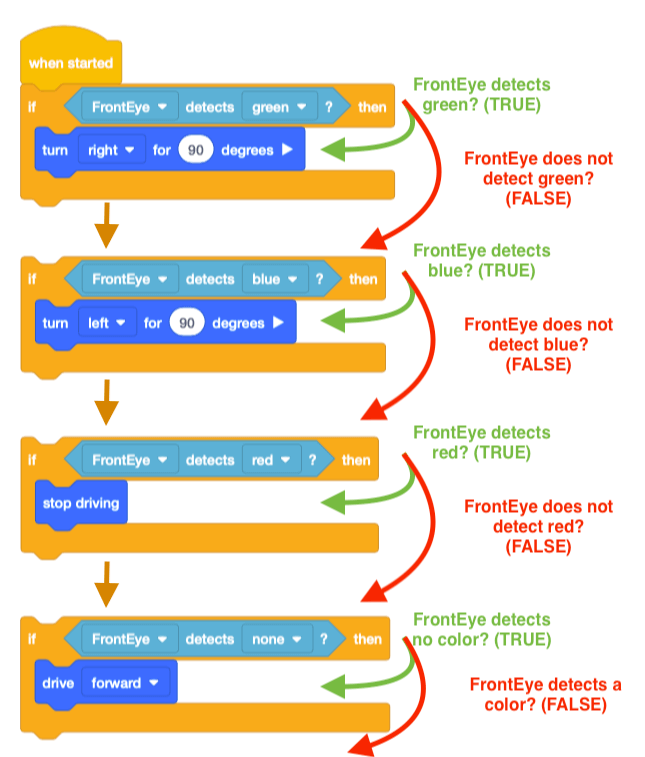
Los bloques [If then] requieren que el robot de realidad virtual tome una decisión. Si la condición es VERDADERA, se ejecutan los bloques dentro del bloque [If then] C. Si la condición es FALSA, se omiten los bloques dentro del bloque [If then] C.
-
- El robot VR continuará avanzando desde que el último bloque [If then] en la pila se informó como VERDADERO y todos los demás bloques se informaron como FALSOS al comienzo del proyecto.
- Guarde el proyecto antes de pasar a la siguiente lección.
Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf