
บทที่ 3: สรุปหลังโครงการ
-
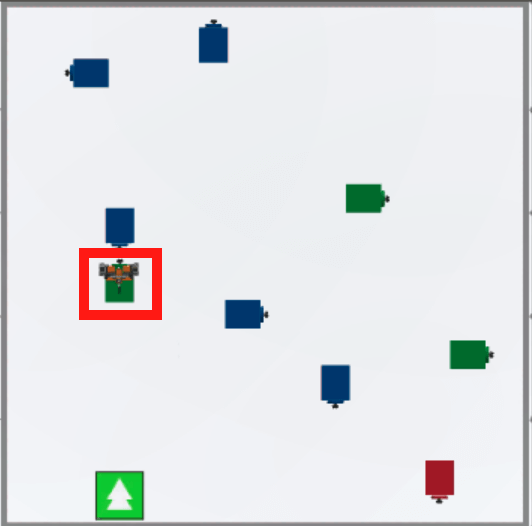
เมื่อโครงการนี้ทำงานหุ่นยนต์ VR ยังคงขับเคลื่อนไปข้างหน้าแม้ว่าจะชนกับดิสก์สีเขียวตัวแรก
-
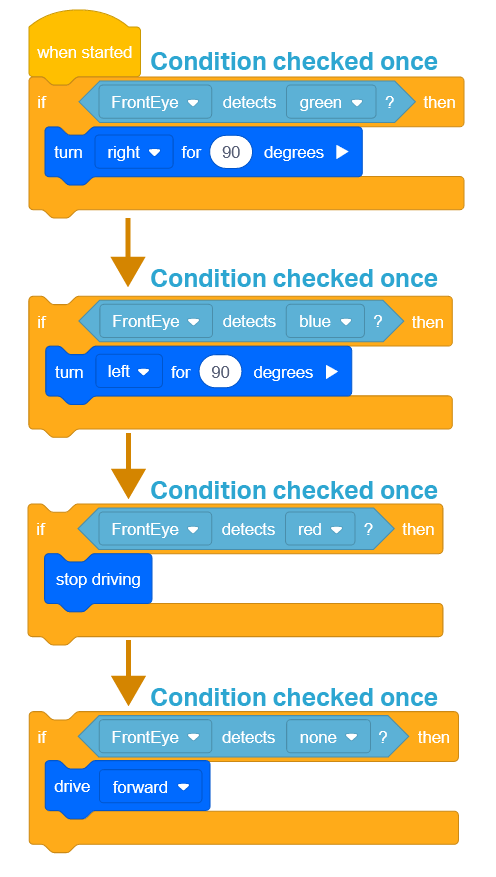
โปรเจกต์นี้จะสั่งให้หุ่นยนต์ VR ตรวจสอบเงื่อนไขของแต่ละบล็อก [ถ้าเป็นเช่นนั้น] หนึ่งครั้งในช่วงเริ่มต้นของโปรเจกต์เท่านั้น
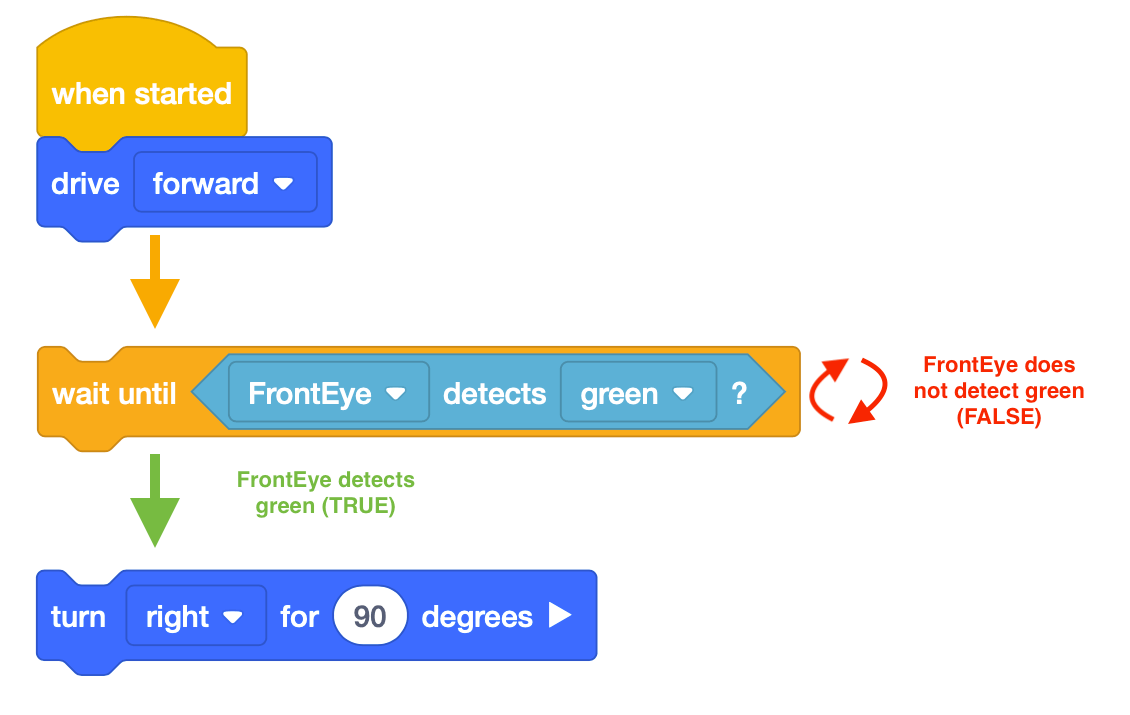
- บล็อก [If then] จะแตกต่างจากบล็อก [Wait until]
-
[รอจนกว่า] บล็อกไม่จำเป็นต้องตัดสินใจโดยหุ่นยนต์ VR เมื่อเงื่อนไขเป็นจริงบล็อก [รอจนกว่า] จะเรียกใช้บล็อกถัดไปในกองซ้อน เมื่อเงื่อนไขเป็นเท็จบล็อก [รอจนกว่า] จะยังคงรอจนกว่าเงื่อนไขจะเป็นจริงและหยุดโครงการที่เหลือไม่ให้ทำงาน
-
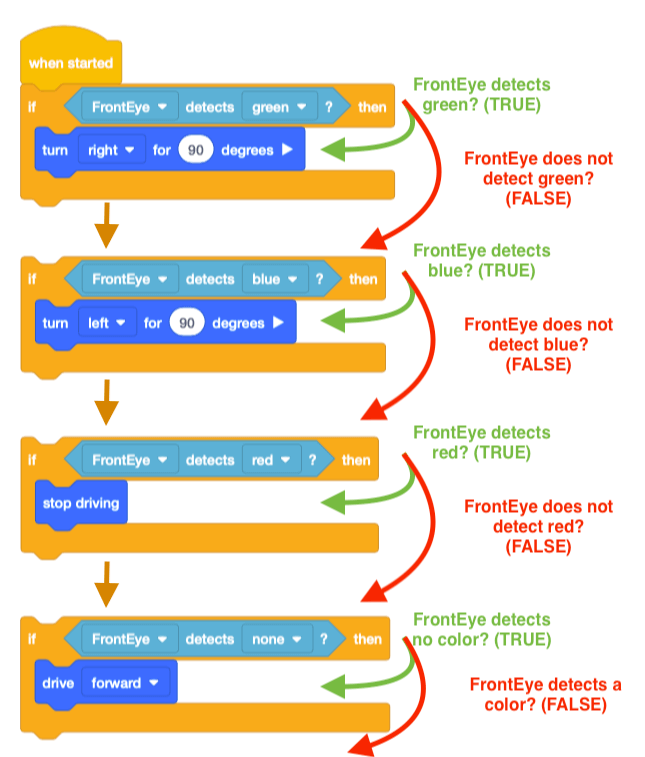
[ถ้าเป็นเช่นนั้น] บล็อกต้องใช้หุ่นยนต์ VR ในการตัดสินใจ หากเงื่อนไขเป็นจริงบล็อกภายในบล็อก [ถ้าเป็นเช่นนั้น] C จะทำงาน หากเงื่อนไขเป็นเท็จบล็อกภายในบล็อก [ถ้าเป็นเช่นนั้น] C จะถูกข้ามไป
-
- หุ่นยนต์ VR จะยังคงขับเคลื่อนไปข้างหน้าต่อไปเนื่องจากบล็อก [If then] ล่าสุดในสแต็คถูกรายงานว่าเป็นจริงและบล็อกอื่นๆทั้งหมดถูกรายงานว่าเป็นเท็จในช่วงเริ่มต้นของโครงการ
- บันทึกโครงการก่อนที่จะไปยังบทเรียนถัดไป