
പാഠം 3: പോസ്റ്റ്-പ്രോജക്റ്റ് സംഗ്രഹം
-
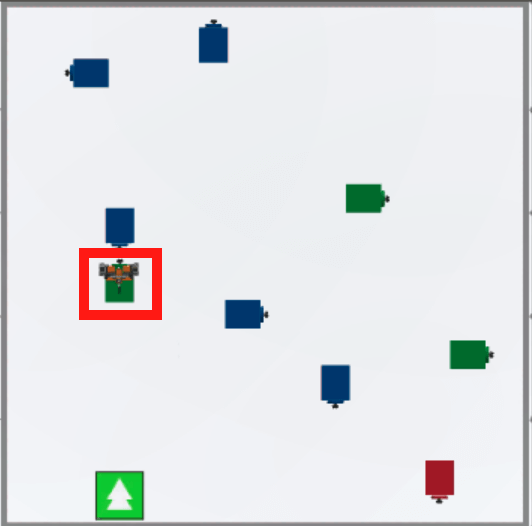
ഈ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ, ആദ്യത്തെ ഗ്രീൻ ഡിസ്കിൽ ഇടിച്ചാലും വിആർ റോബോട്ട് മുന്നോട്ട് ഓടിക്കൊണ്ടിരിക്കും.
-
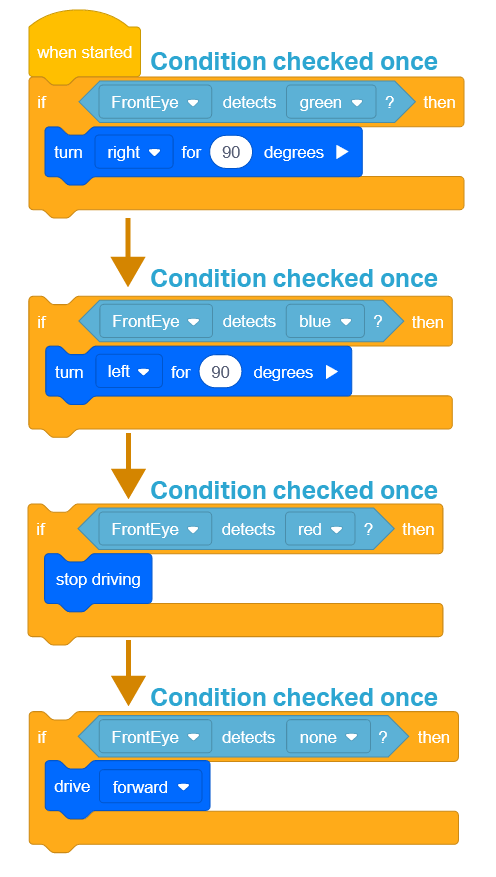
ഈ പ്രോജക്റ്റ്, പ്രോജക്റ്റിന്റെ തുടക്കത്തിൽ ഒരിക്കൽ മാത്രമേ ഓരോ [അങ്ങനെയാണെങ്കിൽ] ബ്ലോക്കിന്റെയും അവസ്ഥ പരിശോധിക്കാൻ VR റോബോട്ടിനോട് നിർദ്ദേശിക്കുന്നുള്ളൂ.
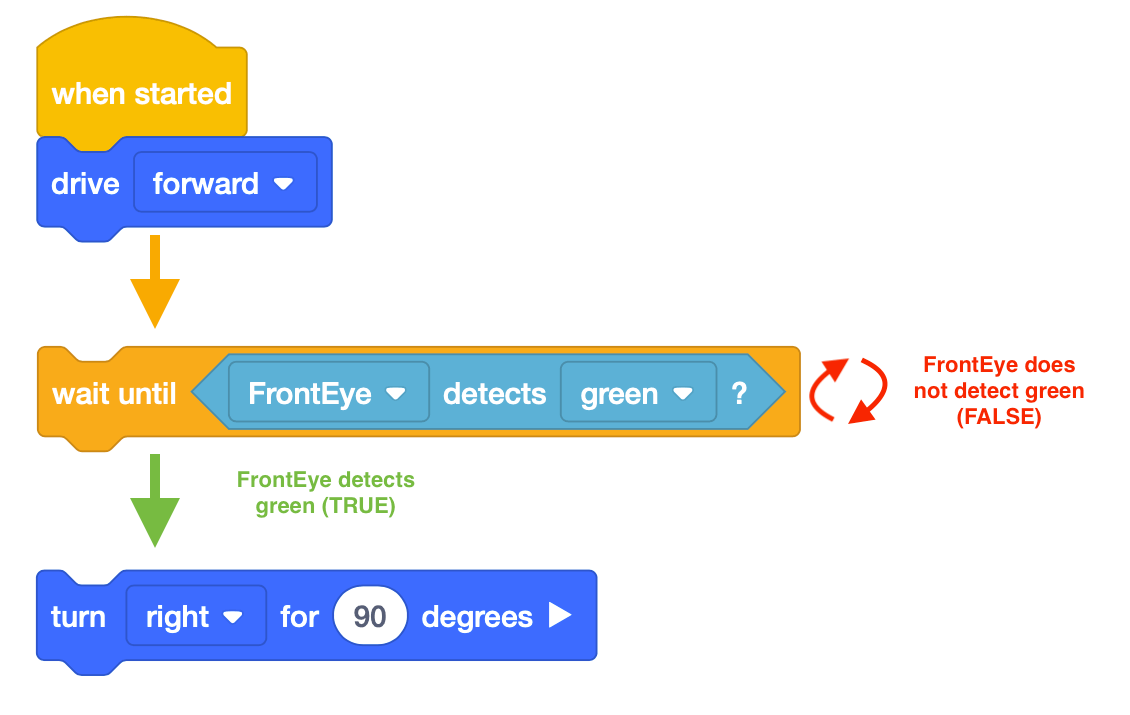
- [അപ്പോൾ] ബ്ലോക്ക് [വരെ കാത്തിരിക്കുക] ബ്ലോക്കിൽ നിന്ന് വ്യത്യസ്തമാണ്.
-
[കാത്തിരിക്കുക] ബ്ലോക്കുകൾക്ക് VR റോബോട്ട് ഒരു തീരുമാനം എടുക്കേണ്ടതില്ല. അവസ്ഥ TRUE ആയിരിക്കുമ്പോൾ, [Wait until] ബ്ലോക്ക് സ്റ്റാക്കിലെ അടുത്ത ബ്ലോക്ക് പ്രവർത്തിപ്പിക്കുന്നു. അവസ്ഥ തെറ്റാണെങ്കിൽ, [Wait until] ബ്ലോക്ക് അവസ്ഥ ശരിയാകുന്നതുവരെ കാത്തിരിക്കുന്നത് തുടരുകയും പ്രോജക്റ്റിന്റെ ബാക്കി ഭാഗങ്ങൾ പ്രവർത്തിക്കുന്നത് നിർത്തുകയും ചെയ്യുന്നു.
-
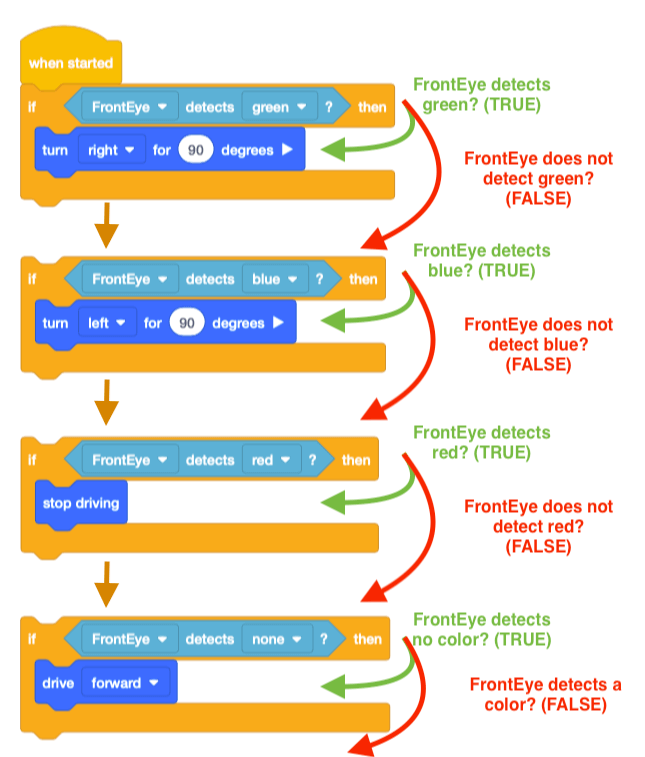
[അങ്ങനെയെങ്കിൽ] ബ്ലോക്കുകൾക്ക് VR റോബോട്ടിനെ ഒരു തീരുമാനം എടുക്കാൻ നിർബന്ധിക്കുന്നു. വ്യവസ്ഥ TRUE ആണെങ്കിൽ, [If then] C ബ്ലോക്കിനുള്ളിലെ ബ്ലോക്കുകൾ പ്രവർത്തിപ്പിക്കപ്പെടുന്നു. വ്യവസ്ഥ FALSE ആണെങ്കിൽ, [If then] C ബ്ലോക്കിനുള്ളിലെ ബ്ലോക്കുകൾ ഒഴിവാക്കപ്പെടും.
-
- പ്രോജക്റ്റിന്റെ തുടക്കത്തിൽ സ്റ്റാക്കിലെ അവസാനത്തെ [അങ്ങനെയാണെങ്കിൽ] ബ്ലോക്ക് TRUE എന്നും മറ്റെല്ലാ ബ്ലോക്കുകളും FALSE എന്നും റിപ്പോർട്ട് ചെയ്തതിനാൽ VR റോബോട്ട് മുന്നോട്ട് നീങ്ങുന്നത് തുടരും.
- അടുത്ത പാഠത്തിലേക്ക് പോകുന്നതിന് മുമ്പ് പ്രോജക്റ്റ് സേവ് ചെയ്യുക.
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.