
Lezione 3: Riepilogo post-progetto
-
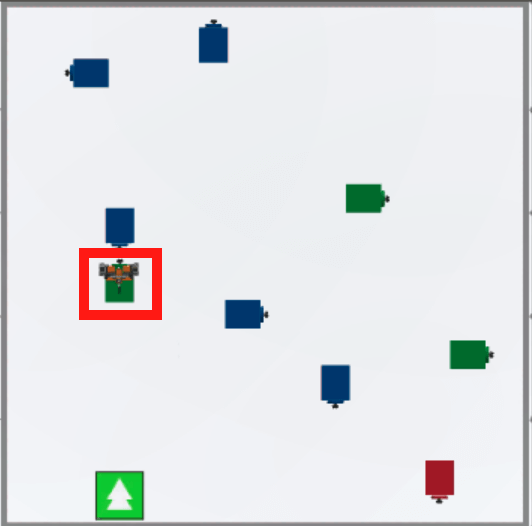
Quando questo progetto viene eseguito, il robot VR continua ad avanzare anche in caso di collisione con il primo disco verde.
-
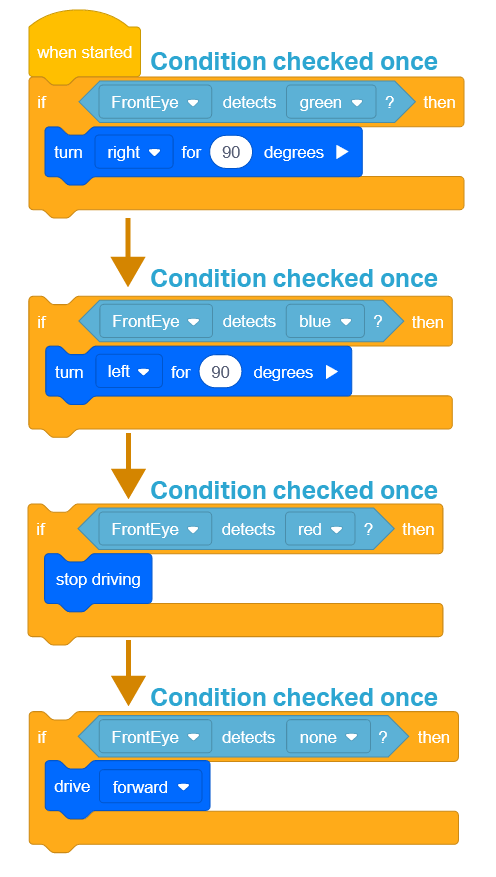
Questo progetto istruisce solo il robot VR a verificare le condizioni di ciascun blocco [If then] una volta all'inizio del progetto.
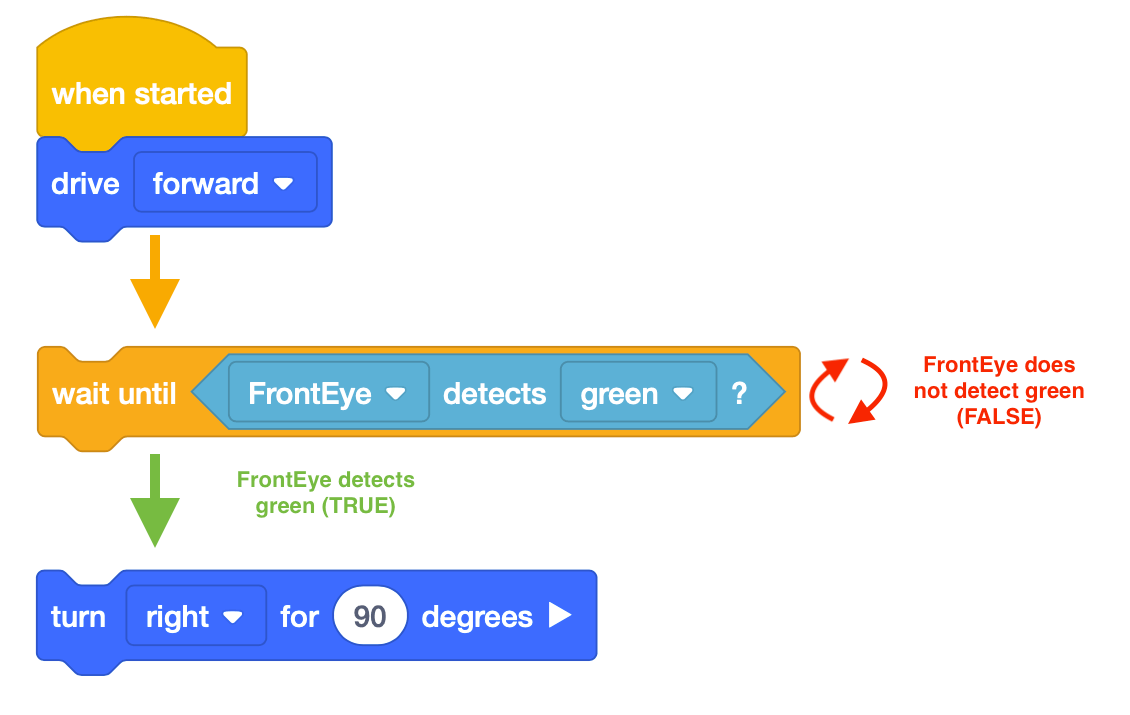
- Il blocco [If then] è diverso dal blocco [Wait until].
-
[Attendere fino a] blocchi non richiedono una decisione da parte del robot VR. Quando la condizione è VERA, il blocco [Wait until] esegue il blocco successivo nello stack. Quando la condizione è FALSA, il blocco [Attendi fino a] continua ad attendere fino a quando la condizione è VERA e interrompe l'esecuzione del resto del progetto.
-
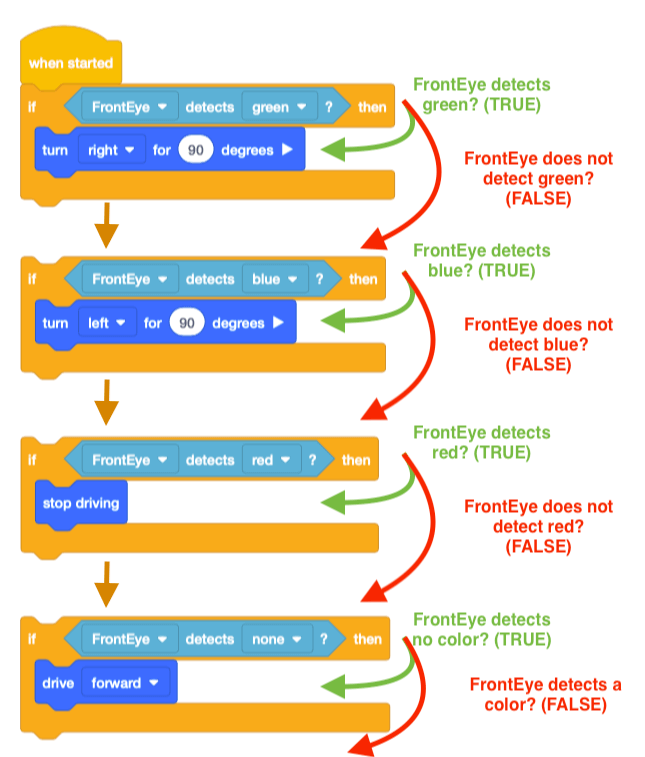
[If then] blocchi richiedono che il robot VR prenda una decisione. Se la condizione è VERA, vengono eseguiti i blocchi all'interno del blocco C [If then]. Se la condizione è FALSA, i blocchi all'interno del blocco C [If then] vengono saltati.
-
- Il robot VR continuerà ad avanzare poiché l'ultimo blocco [If then] nello stack è stato segnalato come VERO e tutti gli altri blocchi sono stati segnalati come FALSI all'inizio del progetto.
- Salva il progetto prima di passare alla lezione successiva.