
Leçon 3 : Résumé post-projet
-
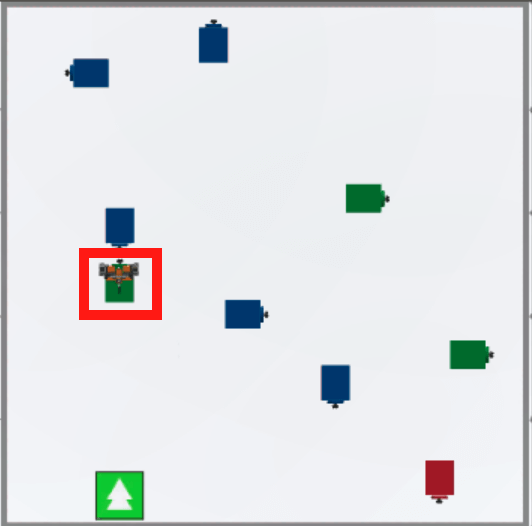
Lorsque ce projet est exécuté, le robot VR continue à avancer même en cas de collision avec le premier disque vert.
-
Ce projet ne demande au robot VR de vérifier les conditions de chaque bloc [If then] qu'une seule fois au début du projet.
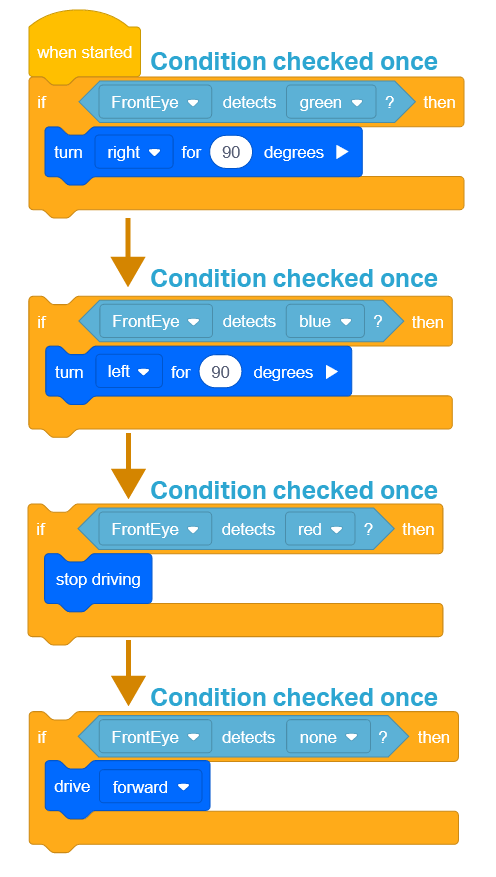
- Le bloc [If then] est différent du bloc [Wait until].
-
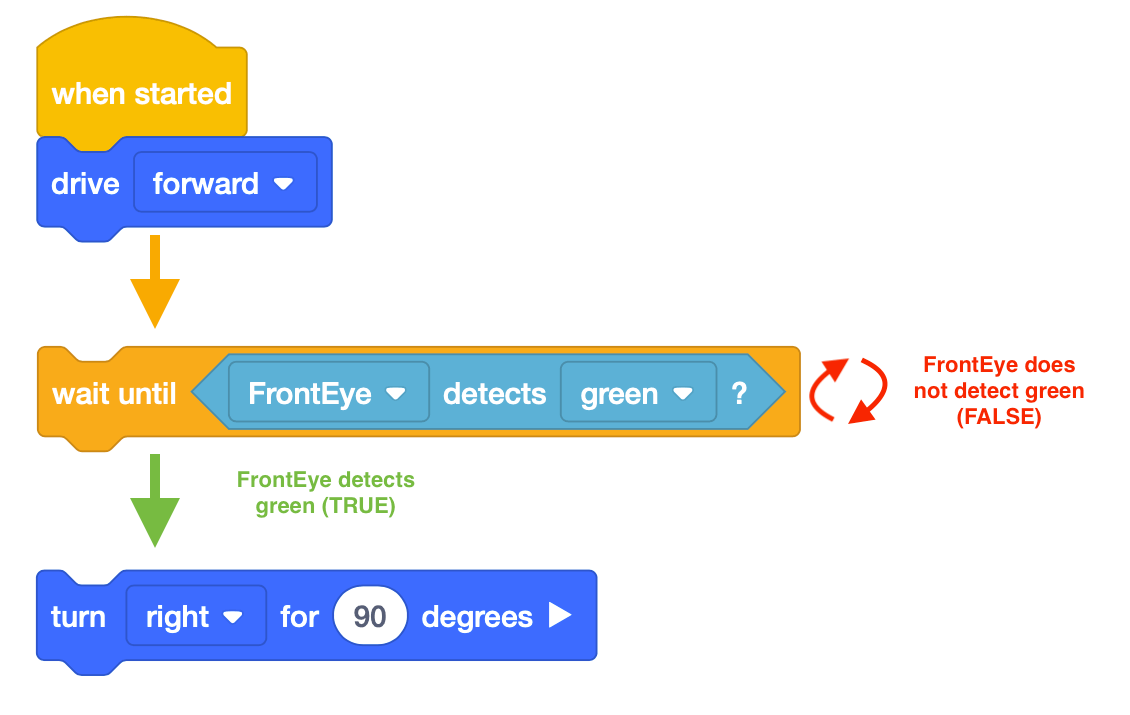
[Attendez que] les blocs ne nécessitent pas de décision à prendre par le robot VR. Lorsque la condition est VRAIE, le bloc [Attendre jusqu'à] exécute le bloc suivant dans la pile. Lorsque la condition est FAUSSE, le bloc [Attendre jusqu'à] continue d'attendre jusqu'à ce que la condition soit VRAIE et arrête l'exécution du reste du projet.
-
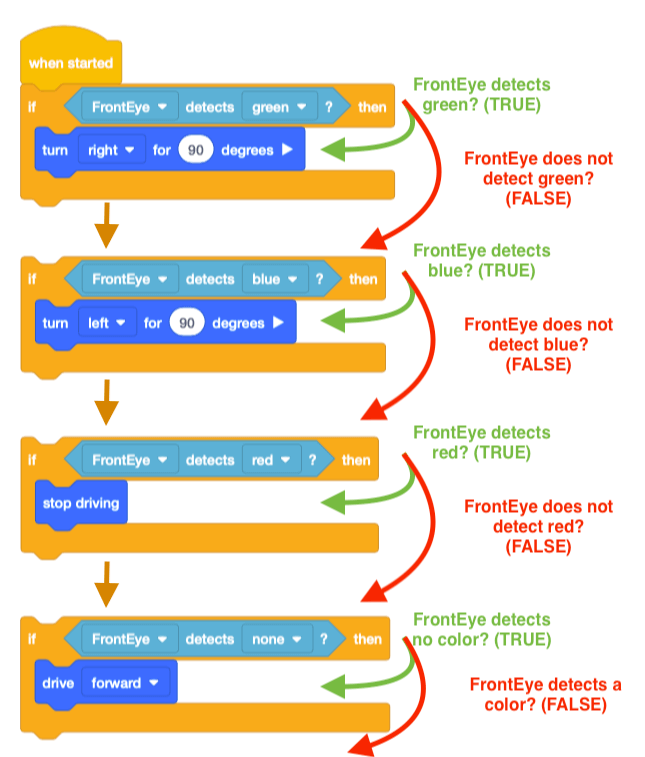
[Si alors] les blocs nécessitent que le robot VR prenne une décision. Si la condition est VRAIE, alors les blocs à l'intérieur du bloc [If then] C sont exécutés. Si la condition est FAUSSE, les blocs à l'intérieur du bloc [If then] C sont ignorés.
-
- Le robot VR continuera à avancer depuis que le dernier bloc [If then] de la pile a été signalé comme VRAI et que tous les autres blocs ont été signalés comme FAUX au début du projet.
- Enregistrez le projet avant de passer à la leçon suivante.
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf