
Jetzt sind Sie an der Reihe, Ihre Bewegungswinkel zu verbessern! In dieser Lektion bewegen Sie Ihren Roboter, um mithilfe von Winkeln um zwei orangefarbene Fässer herum zu navigieren. Dabei erkunden Sie, wie Sie Winkelparameter anpassen, um sowohl die Effizienz Ihres Codierungsprojekts als auch die Präzision der Bewegung Ihres Roboters zu verbessern.
Sehen Sie sich das Video unten an, um mehr über Folgendes zu erfahren:
- Navigieren um Hindernisse mithilfe von Winkeln.
- So passen Sie die Winkelparameter für mehr Präzision an.
Nachdem Sie das Video angesehen haben, halten Sie Ihre Gedanken in Ihrem Tagebuch fest. Beantworten Sie diese Fragen, um Ihre Gedanken zu lenken und sich auf eine Diskussion mit der ganzen Klasse vorzubereiten:
- Wie verändert die Änderung des Winkelparameters die Bewegung des Roboters? Warum möchten Sie den Winkelparameter ändern?
- Was haben Sie in dem Video beobachtet, das Ihre Annahme stützt?
- Listen Sie mindestens zwei Fragen auf, die Sie zur Codierung des Roboters haben und die Ihnen dabei helfen, besser um die Fässer herum zu navigieren.
- Was haben Sie über Codierung oder VEXcode gelernt, das Ihnen in dieser Lektion helfen wird?
Nachdem Sie das Video angesehen haben, halten Sie Ihre Gedanken in Ihrem Tagebuch fest. Beantworten Sie diese Fragen, um Ihre Gedanken zu lenken und sich auf eine Diskussion mit der ganzen Klasse vorzubereiten:
- Wie verändert sich die Bewegung des Roboters durch die Änderung des Winkelparameters? Warum möchten Sie den Winkelparameter ändern?
- Was haben Sie in dem Video beobachtet, das Ihre Annahme stützt?
- Listen Sie mindestens zwei Fragen auf, die Sie zur Codierung des Roboters haben und die Ihnen dabei helfen, besser um die Fässer herum zu navigieren.
- Was haben Sie über Codierung oder VEXcode gelernt, das Ihnen in dieser Lektion helfen wird?
Nachdem die Schüler das Video angesehen haben und bevor sie üben, kommen zu einer Diskussion mit der gesamten Klasse zusammen. Nutzen Sie die Antworten der Schüler auf die gestellten Fragen als Grundlage für die Diskussion.
Notieren Sie die Beiträge der Schüler an der Tafel, damit jeder die Ideen der anderen sehen und darauf aufbauen kann. Erinnern Sie sie daran, ihre Tagebücher oder Bilder aus dem Video zu Rate zu ziehen, um ihre Ideen klar zum Ausdruck zu bringen.
Geführte Praxis
Nachdem Sie das Video angesehen und besprochen haben, sind Sie an der Reihe, in die Praxis umzusetzen!
Schritt 1: Richten Sie das Feld wie unten gezeigt ein.
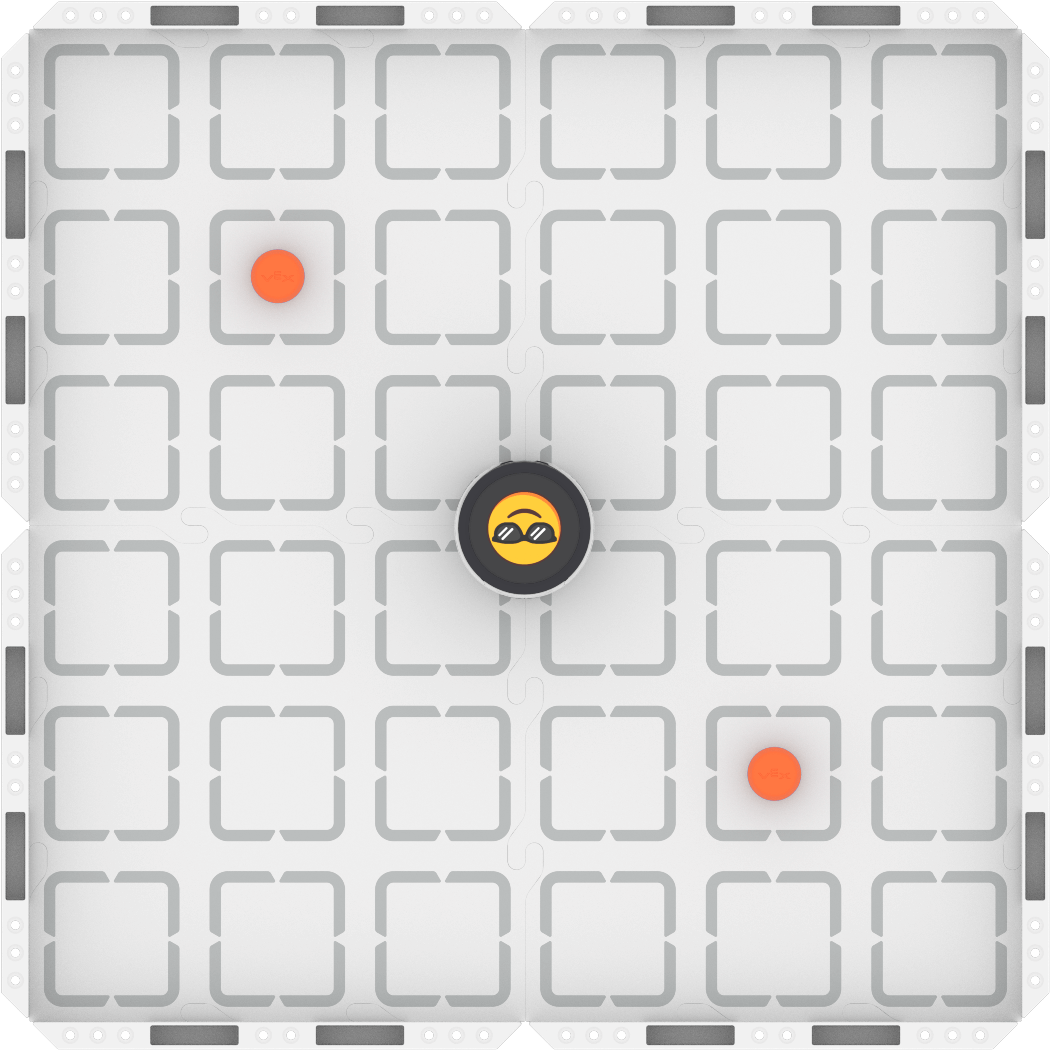
Schritt 2: Modellieren Sie die Bewegungen des Roboters, die zum Erledigen der Aufgabe erforderlich sind, im Fahrmodus.
- Ihre Aufgabe ist es, den Roboter um die orangefarbenen Fässer herumzufahren. Dokumentieren Sie Ihr Fahren und planen Sie dann, wie Sie diese Bewegung kodieren.
- Verwenden Sie diese Aufgabenkarte (Google / .docx / .pdf) als Leitfaden für Ihre Übungen.
- Profi-Tipp: Berücksichtigen Sie beim Erstellen Ihres Codierungsprojekts die Details, die Sie in der vorherigen Lektion verwendet haben. Achten Sie auf jeden Winkel und jede Entfernung und dokumentieren Sie diese detailliert, um Ihren Pfadplan zu erstellen. Verwenden Sie den im Video gezeigten Robot Protractor, um diese Winkel bei der Planung Ihres Pfads zu bestimmen.
Schritt 3: Codieren Sie den Roboter, damit er die Aufgabe erledigt.
- Ihre Aufgabe besteht darin, den Roboter mithilfe Ihres Pfadplans aus Schritt 2 so zu programmieren, dass er sich mit möglichst wenigen Blöcken um die orangefarbenen Fässer herum bewegt.
- Verwenden Sie diese Aufgabenkarte (Google / .docx / .pdf) als Leitfaden für Ihre Übungen.
- Profi-Tipp: Denken Sie daran, zwischen Fahren und Codieren zu wechseln, damit Sie Ihren Roboter so programmieren können, dass er sich präzise in Winkeln bewegt. Sie können bei Bedarf langsam fahren, um Einzelheiten zum Winkel oder zur Entfernung des Roboters zu ermitteln.
Schritt 4: Verwenden Sie den Predict-Drive-Measure-Code -Prozess, um die Präzision Ihres Roboters zu verbessern, während er sich um beide Fässer bewegt:
- Vorhersagen
- Wählen Sie den ersten Winkel, den Sie präzisieren möchten. Machen Sie als Gruppe eine Vorhersage, wie der Blickwinkel mithilfe dieses Satzanfangs verbessert werden kann, und notieren Sie sie in Ihrem Tagebuch:
- Wir denken, dass der Winkel etwa ____________ Grad betragen sollte.
- Wählen Sie den ersten Winkel, den Sie präzisieren möchten. Machen Sie als Gruppe eine Vorhersage, wie der Blickwinkel mithilfe dieses Satzanfangs verbessert werden kann, und notieren Sie sie in Ihrem Tagebuch:
- Laufwerk
- Testen Sie Ihre Vorhersage, indem Sie Ihren Roboter in dem von Ihnen vorhergesagten Winkel fahren. Bewegt es sich wie erwartet? Wenn es sich falsch anfühlt, was sollte geändert werden, um es genauer zu machen? Wenn nicht, was fühlt sich daran richtig an?
- Messen
- Platzieren Sie Ihren Roboter-Winkelmesser unter dem Roboter. In welchem Winkel hast du den Roboter eigentlich gefahren?
- Code
- Nutzen Sie Ihren neuen Ansatz in Ihrem Codierungsprojekt! Passen Sie Ihr Projekt an und führen Sie es dann zum Testen aus. Ist der neue Winkel präziser? Wenn nicht, verwenden Sie Ihren Roboter-Winkelmesser, um den Winkel zu ändern, und versuchen Sie es erneut. Denken Sie daran, Ihre Winkelmessungen und Beobachtungen während der Arbeit in Ihrem Tagebuch festzuhalten.
Ressourcen für die Praxis:
Die hier verlinkten Artikel stehen Ihnen zur Verfügung, wenn Sie beim Abschließen der Aktivität zusätzliche Unterstützung benötigen.
Nachdem Sie das Video angesehen und besprochen haben, sind Sie an der Reihe, in die Praxis umzusetzen!
Schritt 1: Richten Sie das Feld wie unten gezeigt ein.
Schritt 2: Modellieren Sie die Bewegungen des Roboters, die zum Erledigen der Aufgabe erforderlich sind, im Fahrmodus.
- Ihre Aufgabe ist es, den Roboter um die orangefarbenen Fässer herumzufahren. Dokumentieren Sie Ihr Fahren und planen Sie dann, wie Sie diese Bewegung kodieren.
- Verwenden Sie diese Aufgabenkarte (Google / .docx / .pdf) als Leitfaden für Ihre Übungen.
- Profi-Tipp: Berücksichtigen Sie beim Erstellen Ihres Codierungsprojekts die Details, die Sie in der vorherigen Lektion verwendet haben. Achten Sie auf jeden Winkel und jede Entfernung und dokumentieren Sie diese detailliert, um Ihren Pfadplan zu erstellen. Verwenden Sie den im Video gezeigten Robot Protractor, um diese Winkel bei der Planung Ihres Pfads zu bestimmen.
Schritt 3: Codieren Sie den Roboter, damit er die Aufgabe erledigt.
- Ihre Aufgabe besteht darin, den Roboter mithilfe Ihres Pfadplans aus Schritt 2 so zu programmieren, dass er sich mit möglichst wenigen Blöcken um die orangefarbenen Fässer herum bewegt.
- Verwenden Sie diese Aufgabenkarte (Google / .docx / .pdf) als Leitfaden für Ihre Übungen.
- Profi-Tipp: Denken Sie daran, zwischen Fahren und Codieren zu wechseln, damit Sie Ihren Roboter so programmieren können, dass er sich präzise in Winkeln bewegt. Sie können bei Bedarf langsam fahren, um Einzelheiten zum Winkel oder zur Entfernung des Roboters zu ermitteln.
Schritt 4: Verwenden Sie den Predict-Drive-Measure-Code -Prozess, um die Präzision Ihres Roboters zu verbessern, während er sich um beide Fässer bewegt:
- Vorhersagen
- Wählen Sie den ersten Winkel, den Sie präzisieren möchten. Machen Sie als Gruppe eine Vorhersage, wie der Blickwinkel mithilfe dieses Satzanfangs verbessert werden kann, und notieren Sie sie in Ihrem Tagebuch:
- Wir denken, dass der Winkel etwa ____________ Grad betragen sollte.
- Wählen Sie den ersten Winkel, den Sie präzisieren möchten. Machen Sie als Gruppe eine Vorhersage, wie der Blickwinkel mithilfe dieses Satzanfangs verbessert werden kann, und notieren Sie sie in Ihrem Tagebuch:
- Laufwerk
- Testen Sie Ihre Vorhersage, indem Sie Ihren Roboter in dem von Ihnen vorhergesagten Winkel fahren. Bewegt es sich wie erwartet? Wenn es sich falsch anfühlt, was sollte geändert werden, um es genauer zu machen? Wenn nicht, was fühlt sich daran richtig an?
- Messen
- Platzieren Sie Ihren Roboter-Winkelmesser unter dem Roboter. In welchem Winkel hast du den Roboter eigentlich gefahren?
- Code
- Nutzen Sie Ihren neuen Ansatz in Ihrem Codierungsprojekt! Passen Sie Ihr Projekt an und führen Sie es dann zum Testen aus. Ist der neue Winkel präziser? Wenn nicht, verwenden Sie Ihren Roboter-Winkelmesser, um den Winkel zu ändern, und versuchen Sie es erneut. Denken Sie daran, Ihre Winkelmessungen und Beobachtungen während der Arbeit in Ihrem Tagebuch festzuhalten.
Ressourcen für die Praxis:
Die hier verlinkten Artikel stehen Ihnen zur Verfügung, wenn Sie beim Abschließen der Aktivität zusätzliche Unterstützung benötigen.
Stellen Sie die Erwartungen an die Gruppenarbeit gleich zu Beginn in den Vordergrund. Um mehr über Rollen für die Zusammenarbeit beim Programmieren zu erfahren, lesen Sie diesen Artikel über Paarprogrammierung. Stellen Sie Fragen wie:
- Wie wird Ihre Gruppe mit dieser Aktivität beginnen?
- Wie stellen Sie sicher, dass jeder zum Fahren und Programmieren beiträgt?
Verteilen Sie die Aufgabenkarte für Schritt 2 an jeden Schüler (Google / .docx / .pdf). Denken Sie daran: Das Ziel beim Steuern des Roboters zur Erledigung der Aufgabe besteht darin, dass die Schüler ein physisches Modell der Aufgabe entwickeln, aus dem sie ein Computermodell erstellen, wenn sie mit dem Programmieren beginnen. Stellen Sie sicher, dass sich alle Schüler während des gefahrenen Teils der geführten Übung die nötige Zeit zum Fahren, Dokumentieren und Planen nehmen. Das Etablieren guter Gewohnheiten bei einfachen Aufgaben wird Ihnen später helfen, wenn die Aufgaben komplexer werden.
Die Schüler werden ermutigt, beim Planen ihres Pfades den ausgedruckten Robot Protractor zu verwenden. Wenn die Schüler keinen Zugriff auf einen Drucker haben, drucken Sie dies für sie aus.
Wenn die Schüler ihre Fahrpraxis abgeschlossen haben, gehen im Raum umher und fragen Sie die Schüler nach ihrem Lernfortschritt. Stellen Sie Fragen wie:
- Worauf achten Sie beim Autofahren, von dem Sie glauben, dass es Ihnen beim Programmieren hilft? Warum ist dir das wichtig?
- Sind alle gleich gefahren und dokumentiert worden? Was ist ähnlich oder anders? Wie können Sie Ihre Ideen zu einem gemeinsamen Wegplan zusammenführen?
Verteilen Sie die Aufgabenkarte für Schritt 3 an jeden Schüler, nachdem dieser die Erfolgskriterien für das Fahren erfüllt und Ihnen seinen Streckenplan mitgeteilt hat (Google / .docx / .pdf). Die Studierenden verwenden ihre Pfadpläne dann als Grundlage für die Erstellung ihrer VEXcode-Projekte. Ermutigen Sie die Schüler, ihre Fahrdokumentation zu ergänzen, während sie ihre Projekte erstellen und testen, um ihnen dabei zu helfen, herauszufinden, welche Strategien und Details am hilfreichsten sind. Erinnern Sie die Schüler daran, dass sie jederzeit wieder Auto fahren können, um ihnen beim erfolgreichen Programmieren ihres Projekts zu helfen.
Während die Schüler den Roboter programmieren, gehen im Raum umher und verwickeln die Schüler in Diskussionen, um mehr über ihre Programmierfortschritte und ihr Verständnis zu erfahren. Stellen Sie Fragen wie:
- Wie bringen Sie den Roboter dazu, mithilfe von Winkeln um die Hindernisse herum zu navigieren?
- Wie können Sie versuchen, die Anzahl der in diesem Projekt verwendeten Blöcke zu reduzieren?
- Wie hat Ihre Gruppe zusammengearbeitet, um diese Aufgabe gemeinsam zu erledigen?
Schritt 4 soll die Iteration und Erkundung der Schüler fördern, indem sie zwischen Fahren und Codieren wechseln, um ihre Projekte zu verbessern und die beste Strategie für die Aufgabe zu finden. Die Schüler sollten den Prozess Vorhersagen-Fahren-Messen-Coden verwenden, um jeweils eine Sache an der Bewegung ihres Roboters zu verbessern und sich dabei auf die Präzision zu konzentrieren. Sie sollten den Prozess wiederholt durchlaufen, um ihr Projekt zu verbessern. Um diesen Prozess zu erleichtern, stellen Sie Fragen wie:
- Entsprachen die Ergebnisse Ihres Tests Ihrer Vorhersage? Welche Anpassungen müssen Sie vornehmen?
- Wie hilft Ihnen die Vorhersage des Winkels vor dem Fahren dabei, Ihren Roboter präzise zu programmieren?
- Wie hilft Ihnen das Wechseln zwischen Autofahren und Programmieren dabei, Ihr Programmierprojekt zu verbessern? Was können Sie tun, um den Iterationszyklus in Ihrer Gruppe zu verbessern?
- Was haben Sie während dieses Prozesses in Ihrem Tagebuch dokumentiert? Wie hilft Ihnen Ihre Dokumentation bei der Iteration?
Zusammenfassung
Nachdem Sie nun geübt haben, ist es an der Zeit, Ihr Wissen weiterzugeben. Beantworten Sie die folgenden Fragen in Ihrem Tagebuch, um über Ihren Lernfortschritt nachzudenken und sich auf eine Diskussion mit der ganzen Klasse vorzubereiten:
- Was haben Sie beim Autofahren gelernt, das Ihnen beim Programmieren geholfen hat? Wie haben Sie dieses Lernen dokumentiert?
- Was haben Sie über die Verwendung von weniger Blöcken gelernt?
- Was haben Sie über Winkel gelernt?
Nachdem Sie nun geübt haben, ist es an der Zeit, Ihr Wissen weiterzugeben. Beantworten Sie die folgenden Fragen in Ihrem Tagebuch, um über Ihren Lernfortschritt nachzudenken und sich auf eine Diskussion mit der ganzen Klasse vorzubereiten:
- Was haben Sie beim Autofahren gelernt, das Ihnen beim Programmieren geholfen hat? Wie haben Sie dieses Lernen dokumentiert?
- Was haben Sie über die Verwendung von weniger Blöcken gelernt?
- Was haben Sie über Winkel gelernt?
Leiten Sie die Schüler dazu an, ihr Wissen in einer Diskussion mit der gesamten Klasse auszutauschen. Die Fragen, die die Schüler in ihrem Tagebuch beantwortet haben, sind der Ausgangspunkt für die Diskussion. Stellen Sie Folgefragen, um die Schüler dazu zu bringen, ihre Gedanken auf gemeinsame Erkenntnisse auszurichten. Stellen Sie anschließend Fragen wie:
- Wie haben Sie Ihre Winkel und Abstände gewählt? Welchen Einfluss hatten diese Entscheidungen darauf, wie nah Sie an das Fass herankommen konnten, ohne es anzustoßen?
- Was wissen Sie jetzt über die Codierung Ihres Roboters, was Sie vor dem Üben nicht wussten? Welche Beweise haben Sie dafür?
Ergänzen Sie die freigegebene Liste der Codierpraktiken aus Lektion 1 basierend auf den Eingaben der Schüler, um Artefakte zu erstellen, die das bisherige Verständnis der Klasse hinsichtlich der Codierung ihrer Roboter widerspiegeln.
Wählen Sie Weiter > , um mit der nächsten Lektion fortzufahren.