
ตอนนี้ถึงคราวของคุณที่จะเพิ่มระดับมุมการเคลื่อนไหวของคุณแล้ว! ในบทเรียนนี้ คุณจะเคลื่อนย้ายหุ่นยนต์ของคุณเพื่อนำทางไปรอบๆ ถังสีส้มสองถังโดยใช้มุม พร้อมทั้งสำรวจวิธีการปรับพารามิเตอร์มุมเพื่อปรับปรุงประสิทธิภาพของโครงการเขียนโค้ดของคุณและความแม่นยำของการเคลื่อนไหวของหุ่นยนต์ของคุณ
ชมวิดีโอด้านล่างเพื่อเรียนรู้เกี่ยวกับ:
- การนำทางผ่านสิ่งกีดขวางโดยใช้มุม
- วิธีการปรับพารามิเตอร์มุมเพื่อความแม่นยำ
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- การเปลี่ยนแปลงพารามิเตอร์มุมจะเปลี่ยนแปลงการเคลื่อนไหวของหุ่นยนต์อย่างไร เหตุใดคุณจึงต้องการเปลี่ยนพารามิเตอร์มุม?
- คุณสังเกตเห็นอะไรในวิดีโอที่สนับสนุนความคิดของคุณ?
- จดคำถามอย่างน้อยสองข้อที่คุณมีเกี่ยวกับการเขียนโค้ดหุ่นยนต์ที่จะช่วยให้คุณนำทางไปรอบๆ ถังได้ดีขึ้น
- คุณได้เรียนรู้อะไรบ้างเกี่ยวกับการเขียนโค้ดหรือ VEXcode ที่จะช่วยคุณได้ในบทเรียนนี้?
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- การเปลี่ยนแปลงพารามิเตอร์มุมจะเปลี่ยนแปลงการเคลื่อนไหวของหุ่นยนต์อย่างไร เหตุใดคุณจึงต้องการเปลี่ยนพารามิเตอร์มุม?
- คุณสังเกตเห็นอะไรในวิดีโอที่สนับสนุนความคิดของคุณ?
- จดคำถามอย่างน้อยสองข้อที่คุณมีเกี่ยวกับการเขียนโค้ดหุ่นยนต์ที่จะช่วยให้คุณนำทางไปรอบๆ ถังได้ดีขึ้น
- คุณได้เรียนรู้อะไรบ้างเกี่ยวกับการเขียนโค้ดหรือ VEXcode ที่จะช่วยคุณได้ในบทเรียนนี้?
หลังจากที่นักเรียนชมวิดีโอแล้วและก่อนที่จะฝึกซ้อม จะมารวมกันเพื่ออภิปรายทั้งชั้นเรียน ใช้คำตอบของนักเรียนต่อคำถามที่ให้ไว้เป็นพื้นฐานสำหรับการอภิปราย
จดบันทึกความคิดเห็นของนักเรียนไว้บนกระดานเพื่อให้ทุกคนสามารถเห็นและต่อยอดความคิดของกันและกัน เตือนให้พวกเขาอ้างอิงวารสารหรือภาพจากวิดีโอเพื่อช่วยให้พวกเขาแสดงความคิดได้อย่างชัดเจน
การฝึกปฏิบัติแบบมีคำแนะนำ
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ก็ถึงคราวของคุณที่จะฝึกฝนแล้ว!
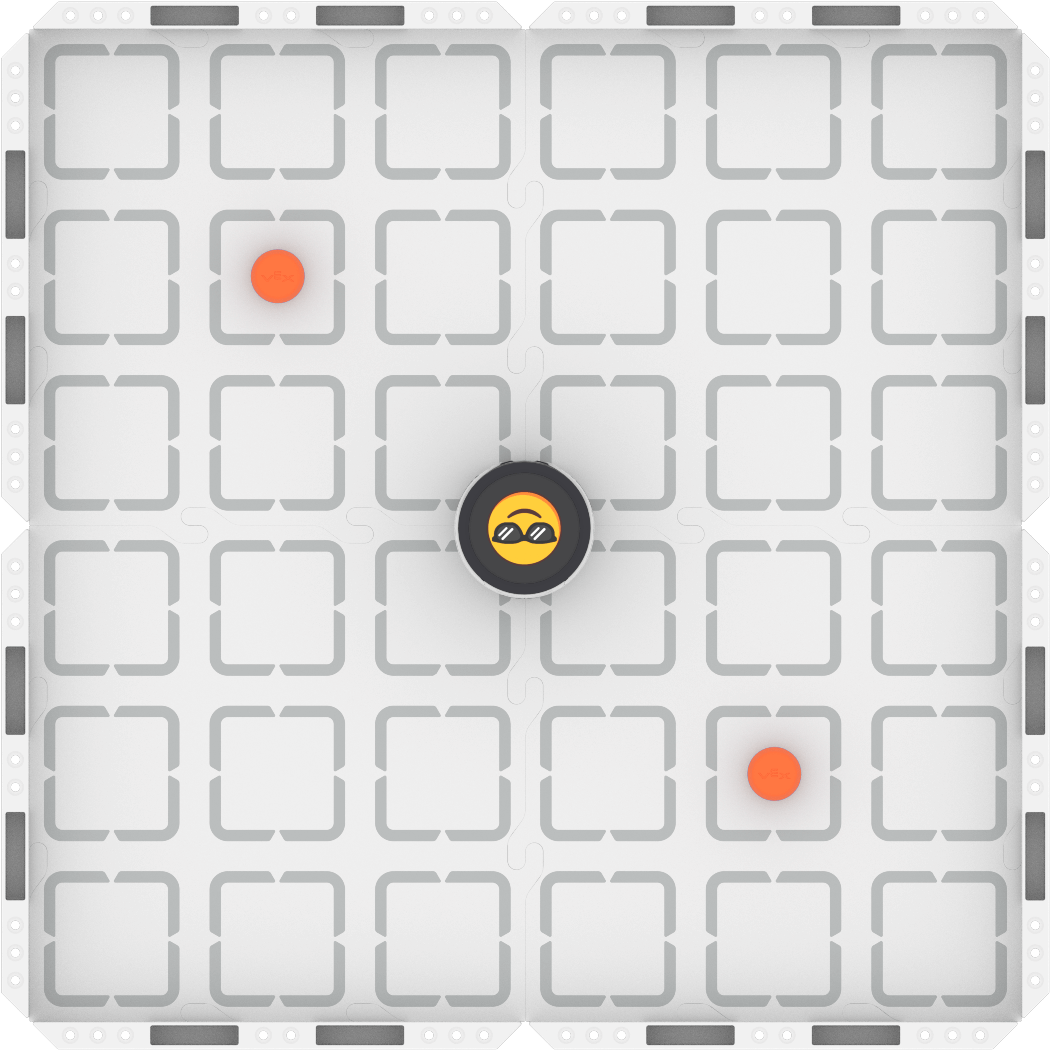
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ตามที่แสดงด้านล่าง
ขั้นตอน 2: สร้างแบบจำลองการเคลื่อนไหวของหุ่นยนต์ที่จำเป็นในการทำงานให้สำเร็จโดยใช้โหมดขับเคลื่อน
- ภารกิจของคุณคือขับหุ่นยนต์ไปรอบ ๆ ถังสีส้ม บันทึกการขับขี่ของคุณ จากนั้นวางแผนว่าจะเข้ารหัสการเคลื่อนไหวนั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ทำงานให้สำเร็จ
- งานของคุณคือใช้แผนเส้นทางจากขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์เคลื่อนที่ไปรอบๆ ถังสีส้มโดยใช้บล็อกให้น้อยที่สุด
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: อย่าลืมสลับไปมาระหว่างการขับรถและการเขียนโค้ดเพื่อช่วยให้คุณเขียนโค้ดให้หุ่นยนต์เคลื่อนที่เป็นมุมได้อย่างแม่นยำ คุณสามารถขับช้าๆ ได้หากจำเป็น เพื่อช่วยให้คุณระบุข้อมูลจำเพาะเกี่ยวกับมุมหรือระยะทางของหุ่นยนต์ได้
ขั้นตอน 4: ใช้กระบวนการ Predict-Drive-Measure-Code เพื่อปรับปรุงความแม่นยำของหุ่นยนต์ของคุณขณะเคลื่อนที่ไปรอบ ๆ ทั้งสองถัง:
- ทำนาย
- เลือกมุมแรกที่คุณต้องการให้แม่นยำยิ่งขึ้น ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- เราคิดว่ามุมควรอยู่ที่ประมาณ ____________ องศา
- เลือกมุมแรกที่คุณต้องการให้แม่นยำยิ่งขึ้น ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- ไดรฟ์
- ทดสอบการทำนายของคุณโดยขับเคลื่อนหุ่นยนต์ตามมุมที่คุณทำนายไว้ มันเคลื่อนไหวตามที่คุณคาดหวังไว้หรือเปล่า? หากรู้สึกว่าไม่ถูกต้องควรเปลี่ยนอะไรให้แม่นยำยิ่งขึ้น? ถ้าไม่อย่างนั้นแล้วรู้สึกยังไงถึงจะดี?
- วัด
- วางหุ่นยนต์วัดมุมของคุณไว้ใต้หุ่นยนต์ จริงๆ แล้วคุณขับหุ่นยนต์ด้วยมุมไหน?
- รหัส
- ใช้มุมมองใหม่ของคุณในโครงการการเขียนโค้ดของคุณ! ปรับแต่งโครงการของคุณแล้วรันเพื่อทดสอบ มุมใหม่มีความแม่นยำมากขึ้นหรือไม่? หากไม่เป็นเช่นนั้น ให้ใช้หุ่นยนต์วัดมุมเพื่อช่วยเปลี่ยนมุมและลองอีกครั้ง อย่าลืมบันทึกการวัดมุมและการสังเกตของคุณลงในสมุดบันทึกขณะที่คุณดำเนินการ
ทรัพยากรสำหรับการปฏิบัติ:
บทความที่ลิงก์ไว้ที่นี่สามารถใช้ได้ในกรณีที่คุณต้องการความช่วยเหลือเพิ่มเติมในระหว่างการดำเนินกิจกรรม
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ก็ถึงคราวของคุณที่จะฝึกฝนแล้ว!
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ตามที่แสดงด้านล่าง
ขั้นตอน 2: สร้างแบบจำลองการเคลื่อนไหวของหุ่นยนต์ที่จำเป็นในการทำงานให้สำเร็จโดยใช้โหมดขับเคลื่อน
- ภารกิจของคุณคือขับหุ่นยนต์ไปรอบ ๆ ถังสีส้ม บันทึกการขับขี่ของคุณ จากนั้นวางแผนว่าจะเข้ารหัสการเคลื่อนไหวนั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ทำงานให้สำเร็จ
- งานของคุณคือใช้แผนเส้นทางจากขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์เคลื่อนที่ไปรอบๆ ถังสีส้มโดยใช้บล็อกให้น้อยที่สุด
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: อย่าลืมสลับไปมาระหว่างการขับรถและการเขียนโค้ดเพื่อช่วยให้คุณเขียนโค้ดให้หุ่นยนต์เคลื่อนที่เป็นมุมได้อย่างแม่นยำ คุณสามารถขับช้าๆ ได้หากจำเป็น เพื่อช่วยให้คุณระบุข้อมูลจำเพาะเกี่ยวกับมุมหรือระยะทางของหุ่นยนต์ได้
ขั้นตอน 4: ใช้กระบวนการ Predict-Drive-Measure-Code เพื่อปรับปรุงความแม่นยำของหุ่นยนต์ของคุณขณะเคลื่อนที่ไปรอบ ๆ ทั้งสองถัง:
- ทำนาย
- เลือกมุมแรกที่คุณต้องการให้แม่นยำยิ่งขึ้น ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- เราคิดว่ามุมควรอยู่ที่ประมาณ ____________ องศา
- เลือกมุมแรกที่คุณต้องการให้แม่นยำยิ่งขึ้น ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- ไดรฟ์
- ทดสอบการทำนายของคุณโดยขับเคลื่อนหุ่นยนต์ตามมุมที่คุณทำนายไว้ มันเคลื่อนไหวตามที่คุณคาดหวังไว้หรือเปล่า? หากรู้สึกว่าไม่ถูกต้องควรเปลี่ยนอะไรให้แม่นยำยิ่งขึ้น? ถ้าไม่อย่างนั้นแล้วรู้สึกยังไงถึงจะดี?
- วัด
- วางหุ่นยนต์วัดมุมของคุณไว้ใต้หุ่นยนต์ จริงๆ แล้วคุณขับหุ่นยนต์ด้วยมุมไหน?
- รหัส
- ใช้มุมมองใหม่ของคุณในโครงการการเขียนโค้ดของคุณ! ปรับแต่งโครงการของคุณแล้วรันเพื่อทดสอบ มุมใหม่มีความแม่นยำมากขึ้นหรือไม่? หากไม่เป็นเช่นนั้น ให้ใช้หุ่นยนต์วัดมุมเพื่อช่วยเปลี่ยนมุมและลองอีกครั้ง อย่าลืมบันทึกการวัดมุมและการสังเกตของคุณลงในสมุดบันทึกขณะที่คุณดำเนินการ
ทรัพยากรสำหรับการปฏิบัติ:
บทความที่ลิงก์ไว้ที่นี่สามารถใช้ได้ในกรณีที่คุณต้องการความช่วยเหลือเพิ่มเติมในระหว่างการดำเนินกิจกรรม
ความคาดหวังการทำงานกลุ่มเบื้องหน้าในช่วงเริ่มต้น หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับบทบาทสำหรับการทำงานร่วมกันในการเขียนโค้ด ดูบทความนี้เกี่ยวกับการเขียนโปรแกรมแบบคู่ ถามคำถามเช่น:
- กลุ่มของคุณจะเริ่มกิจกรรมนี้อย่างไร?
- คุณจะมั่นใจได้อย่างไรว่าทุกคนมีส่วนร่วมในการขับเคลื่อนและการเขียนโค้ด?
แจกบัตรงานขั้นตอนที่ 2 ให้กับนักเรียนแต่ละคน (Google / .docx / .pdf). โปรดจำไว้ว่าเป้าหมายในการขับเคลื่อนหุ่นยนต์เพื่อทำภารกิจให้สำเร็จคือเพื่อให้นักเรียนพัฒนาแบบจำลองทางกายภาพของภารกิจ จากนั้นพวกเขาจะสร้างแบบจำลองเชิงคำนวณจากนั้นเมื่อเริ่มเขียนโค้ด ให้แน่ใจว่านักเรียนทุกคนใช้เวลาเท่าที่จำเป็นในการขับรถ จัดทำเอกสาร และวางแผนในระหว่างส่วนที่ต้องขับเคลื่อนของการฝึกปฏิบัติที่มีคำแนะนำ การสร้างนิสัยที่ดีในการทำภารกิจง่าย ๆ จะช่วยให้เมื่อภารกิจมีความซับซ้อนมากขึ้น
นักเรียนควรใช้หุ่นยนต์ Protractor ที่พิมพ์ออกมาในการวางแผนเส้นทางของตน หากนักเรียนไม่มีเครื่องพิมพ์ โปรดพิมพ์เอกสารดังกล่าวให้พวกเขา
ขณะที่นักเรียนทำการฝึกขับรถเสร็จแล้ว เดินไปรอบๆ ห้องและสอบถามนักเรียนเกี่ยวกับการเรียนรู้ของพวกเขา ถามคำถามเช่น:
- มีอะไรบ้างที่คุณใส่ใจขณะขับรถที่คุณคิดว่าจะช่วยให้คุณเขียนโค้ดได้? ทำไมมันถึงสำคัญกับคุณ?
- ทุกคนขับรถและบันทึกแบบเดียวกันหรือไม่? อะไรที่เหมือนหรือแตกต่าง? คุณจะรวมแนวคิดของคุณให้เป็นแผนเส้นทางร่วมกันได้อย่างไร
แจกบัตรงานขั้นตอนที่ 3 ให้กับนักเรียนแต่ละคนหลังจากที่พวกเขาบรรลุเกณฑ์ความสำเร็จในการขับรถ และแบ่งปันแผนเส้นทางกับคุณ (Google / .docx / .pdf) จากนั้นนักศึกษาจะใช้แผนเส้นทางของตนเป็นพื้นฐานในการสร้างโครงการ VEXcode กระตุ้นให้ผู้เรียนเพิ่มเอกสารการขับขี่ในขณะที่สร้างและทดสอบโครงการของตน เพื่อช่วยให้ระบุกลยุทธ์และรายละเอียดที่เป็นประโยชน์มากที่สุดได้ เตือนนักเรียนว่าพวกเขาสามารถกลับมาขับรถได้ทุกเมื่อเพื่อช่วยให้เขียนโค้ดโครงการของตนได้สำเร็จ
ในขณะที่นักเรียนกำลังเขียนโค้ดหุ่นยนต์ ก็เดินไปรอบๆ ห้องและชวนนักเรียนร่วมสนทนาเพื่อเรียนรู้เกี่ยวกับความคืบหน้าและความเข้าใจในการเขียนโค้ดของพวกเขา ถามคำถามเช่น:
- คุณทำให้หุ่นยนต์สามารถเคลื่อนที่ผ่านสิ่งกีดขวางโดยใช้มุมได้อย่างไร
- คุณจะพยายามลดจำนวนบล็อกที่ใช้ในโครงการนี้ได้อย่างไร
- กลุ่มของคุณร่วมมือกันอย่างไรเพื่อบรรลุภารกิจนี้ร่วมกัน?
ขั้นตอน 4 ออกแบบมาเพื่อส่งเสริมการทำซ้ำและการสำรวจของนักเรียนโดยการสลับระหว่างการขับเคลื่อนและการเขียนโค้ดเพื่อปรับปรุงโครงการของพวกเขาและค้นหาแนวทางที่ดีที่สุดสำหรับงาน Students should use the Predict-Drive-Measure-Code process to help them improve one thing about their robot's movement at a time, focusing on precision. พวกเขาควรหมุนเวียนกระบวนการซ้ำๆ เพื่อปรับปรุงโครงการของพวกเขา เพื่ออำนวยความสะดวกให้กับกระบวนการนี้ ให้ถามคำถามเช่น:
- ผลการทดสอบของคุณตรงกับที่คุณคาดการณ์ไว้หรือไม่? คุณต้องปรับเปลี่ยนอะไรบ้าง?
- การคาดเดามุมก่อนขับรถช่วยให้คุณเขียนโค้ดหุ่นยนต์ได้อย่างแม่นยำอย่างไร
- การปั่นจักรยานระหว่างการขับรถและการเขียนโค้ดช่วยให้คุณปรับปรุงโครงการการเขียนโค้ดของคุณได้อย่างไร คุณสามารถทำอะไรได้บ้างเพื่อปรับปรุงวงจรการวนซ้ำในกลุ่มของคุณ?
- คุณได้บันทึกอะไรไว้ในวารสารของคุณตลอดกระบวนการนี้บ้าง? เอกสารของคุณช่วยคุณอย่างไรในขณะที่คุณทำซ้ำ?
สรุป
ตอนนี้คุณได้ฝึกฝนแล้ว ก็ถึงเวลาที่จะแบ่งปันสิ่งที่คุณได้เรียนรู้ ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- มีอะไรบ้างที่คุณเรียนรู้ระหว่างขับรถที่ช่วยคุณในการเขียนโค้ด? คุณบันทึกการเรียนรู้ดังกล่าวไว้อย่างไร?
- คุณได้เรียนรู้อะไรบ้างจากการใช้บล็อคน้อยลง?
- คุณได้เรียนรู้อะไรเกี่ยวกับมุมบ้าง?
ตอนนี้คุณได้ฝึกฝนแล้ว ก็ถึงเวลาที่จะแบ่งปันสิ่งที่คุณได้เรียนรู้ ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- มีอะไรบ้างที่คุณเรียนรู้ระหว่างขับรถที่ช่วยคุณในการเขียนโค้ด? คุณบันทึกการเรียนรู้ดังกล่าวไว้อย่างไร?
- คุณได้เรียนรู้อะไรบ้างจากการใช้บล็อคน้อยลง?
- คุณได้เรียนรู้อะไรเกี่ยวกับมุมบ้าง?
แนะนำให้นักเรียนแบ่งปันการเรียนรู้ของพวกเขาในการอภิปรายทั้งชั้นเรียน คำถามที่นักเรียนตอบไว้ในวารสารของตนเป็นจุดเริ่มต้นของการอภิปราย ถามคำถามติดตามเพื่อชี้แนะให้นักเรียนรวมความคิดของตนเข้าด้วยกันเพื่อสร้างความเข้าใจร่วมกัน ติดตามด้วยคำถามเช่น:
- คุณเลือกมุมและระยะทางอย่างไร? ตัวเลือกเหล่านั้นส่งผลต่อการเข้าใกล้ถังโดยไม่ทำให้ถังกระแทกอย่างไร
- ตอนนี้คุณมีความรู้เกี่ยวกับการเขียนโค้ดหุ่นยนต์อะไรบ้างที่คุณไม่เคยรู้มาก่อนที่จะฝึกฝน? คุณมีหลักฐานอะไรมาสนับสนุนเรื่องนี้?
เพิ่มรายการแนวทางการเขียนโค้ดร่วมกันจากบทเรียนที่ 1 ตามข้อมูลจากนักเรียน เพื่อสร้างสิ่งประดิษฐ์ที่สะท้อนถึงความเข้าใจของชั้นเรียนในการเขียนโค้ดหุ่นยนต์จนถึงขณะนี้
เลือก ถัดไป > เพื่อไปยังบทเรียนถัดไป