
Nu is het jouw beurt om je bewegingshoeken te verbeteren! In deze les laat u uw robot rond twee oranje vaten navigeren met behulp van hoeken. U leert hoe u hoekparameters kunt aanpassen om zowel de efficiëntie van uw codeerproject als de precisie van de bewegingen van uw robot te verbeteren.
Bekijk de onderstaande video voor meer informatie:
- Navigeren rond obstakels met behulp van hoeken.
- Hoe u hoekparameters aanpast voor meer precisie.
Nu u de video hebt bekeken, kunt u uw gedachten in uw dagboek noteren. Beantwoord deze vragen om je denkproces te sturen en je voor te bereiden op een discussie met de hele klas:
- Hoe verandert de beweging van de robot als de hoekparameter wordt gewijzigd? Waarom zou je de hoekparameter willen wijzigen?
- Wat heb je in de video gezien dat jouw gedachtegang ondersteunt?
- Noem minimaal twee vragen die je hebt over het programmeren van de robot. Deze vragen helpen je om beter door de vaten te navigeren.
- Wat heb je geleerd over coderen of VEXcode dat je in deze les kan helpen?
Nu u de video hebt bekeken, kunt u uw gedachten in uw dagboek noteren. Beantwoord deze vragen om je denkproces te sturen en je voor te bereiden op een discussie met de hele klas:
- Hoe verandert de beweging van de robot als de hoekparameter wordt gewijzigd? Waarom zou je de hoekparameter willen wijzigen?
- Wat heb je in de video gezien dat jouw gedachtegang ondersteunt?
- Noem minimaal twee vragen die je hebt over het programmeren van de robot. Deze vragen helpen je om beter door de vaten te navigeren.
- Wat heb je geleerd over coderen of VEXcode dat je in deze les kan helpen?
Nadat de leerlingen de video hebben bekeken en voordat ze gaan oefenen, komen bij elkaar voor een discussie met de hele klas Gebruik de antwoorden van studenten op de gestelde vragen als basis voor de discussie.
Noteer de bijdragen van de leerlingen op het bord, zodat iedereen elkaars ideeën kan zien en hierop kan voortbouwen. Herinner ze eraan dat hun dagboeken of de afbeeldingen uit de video moeten raadplegen, zodat ze hun ideeën duidelijk kunnen verwoorden.
Begeleide oefening
Nu je de video hebt bekeken en besproken, is het jouw beurt om te oefenen!
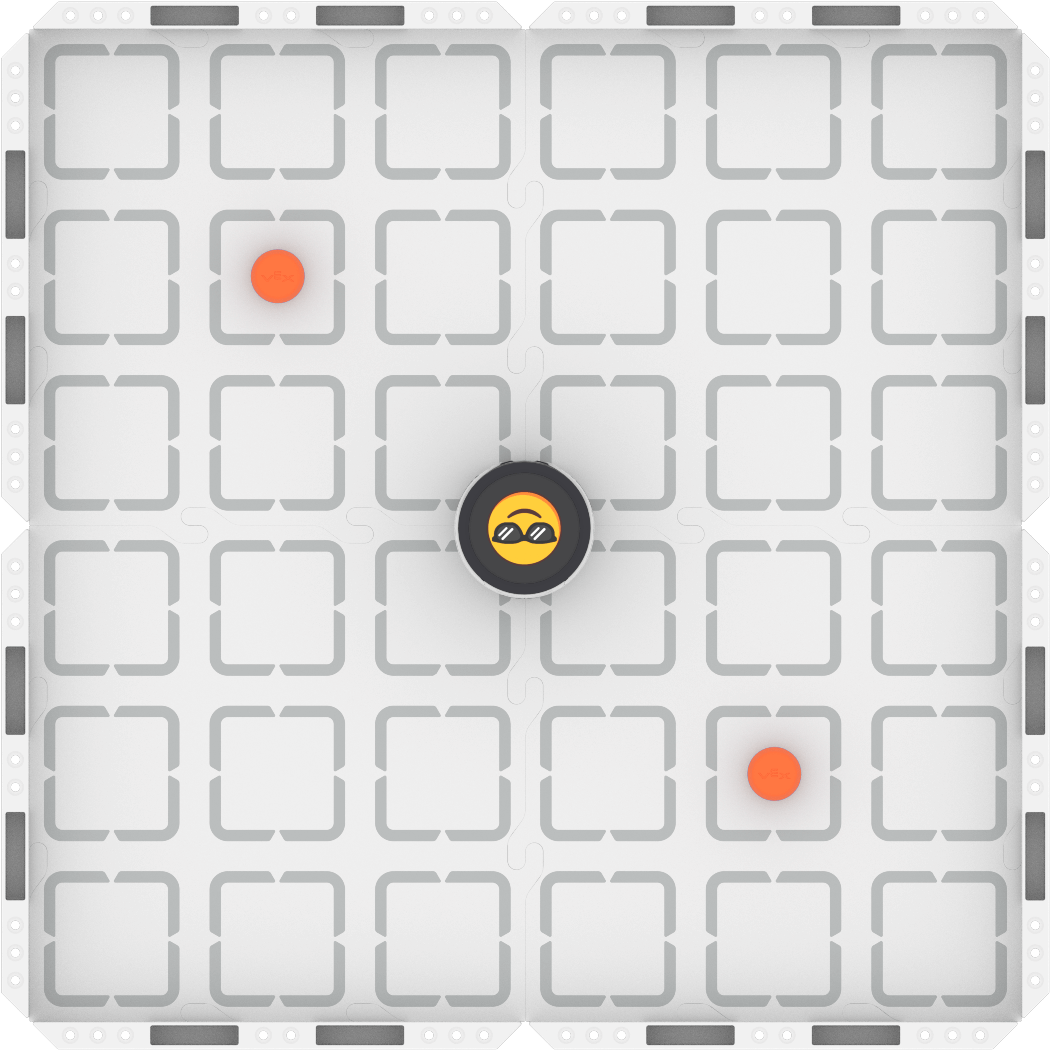
Stap 1: Stel het veld in zoals hieronder weergegeven.
Stap 2: Modelleer de bewegingen van de robot die nodig zijn om de taak te voltooien met behulp van de Rijmodus.
- Jouw taak is om de robot rond de oranje vaten te rijden. Documenteer uw rijgedrag en plan vervolgens hoe u die beweging gaat coderen.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Professionele tip: Houd bij het maken van uw codeerproject rekening met de details die u in de vorige les hebt gebruikt. Let goed op elke hoek en afstand en documenteer deze gedetailleerd om uw routeplan te maken. Gebruik de Robot Protractor, getoond in de video, om deze hoeken te bepalen bij het plannen van uw pad.
Stap 3: Programmeer de robot om de taak voltooien.
- Jouw taak is om het padplan uit stap 2 te gebruiken om de robot zo te programmeren dat hij langs de oranje vaten kan bewegen met zo min mogelijk blokken.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Professionele tip: vergeet niet om te schakelen tussen rijden en coderen. Zo kunt u uw robot programmeren om nauwkeurig onder hoeken te bewegen. U kunt indien nodig langzaam rijden, zodat u specifieke details over de hoek of afstand van de robot kunt vaststellen.
Stap 4: Gebruik het Predict-Drive-Measure-Code proces om de precisie van uw robot te verbeteren terwijl deze rond beide cilinders beweegt:
- Voorspellen
- Kies de eerste hoek die u nauwkeuriger wilt maken. Doe een groepsvoorspelling over hoe de hoek verbeterd kan worden met behulp van deze zinsbouw en noteer dit in je dagboek:
- Wij denken dat de hoek ongeveer ____________ graden moet zijn.
- Kies de eerste hoek die u nauwkeuriger wilt maken. Doe een groepsvoorspelling over hoe de hoek verbeterd kan worden met behulp van deze zinsbouw en noteer dit in je dagboek:
- Rijd
- Test uw voorspelling door uw robot in de voorspelde hoek te laten rijden. Beweegt het zoals je verwachtte? Als het niet klopt, wat moet er dan veranderen om de waarde nauwkeuriger te maken? Zo niet, wat voelt er dan wel goed aan?
- Meeteenheid
- Plaats uw robotgradenboog onder de robot. Onder welke hoek heb je de robot daadwerkelijk bestuurd?
- Code
- Gebruik je nieuwe invalshoek in je codeerproject! Pas uw project aan en voer het uit om te testen. Is de nieuwe hoek nauwkeuriger? Als dat niet lukt, gebruik dan uw Robot Protractor om de hoek te veranderen en probeer het opnieuw. Zorg ervoor dat u uw hoekmetingen en observaties in uw dagboek noteert.
Hulpmiddelen voor de praktijk:
De hier gelinkte artikelen zijn beschikbaar als u extra ondersteuning nodig hebt tijdens het voltooien van de activiteit.
Nu je de video hebt bekeken en besproken, is het jouw beurt om te oefenen!
Stap 1: Stel het veld in zoals hieronder weergegeven.
Stap 2: Modelleer de bewegingen van de robot die nodig zijn om de taak te voltooien met behulp van de Rijmodus.
- Jouw taak is om de robot rond de oranje vaten te rijden. Documenteer uw rijgedrag en plan vervolgens hoe u die beweging gaat coderen.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Professionele tip: Houd bij het maken van uw codeerproject rekening met de details die u in de vorige les hebt gebruikt. Let goed op elke hoek en afstand en documenteer deze gedetailleerd om uw routeplan te maken. Gebruik de Robot Protractor, getoond in de video, om deze hoeken te bepalen bij het plannen van uw pad.
Stap 3: Programmeer de robot om de taak voltooien.
- Jouw taak is om het padplan uit stap 2 te gebruiken om de robot zo te programmeren dat hij langs de oranje vaten kan bewegen met zo min mogelijk blokken.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Professionele tip: vergeet niet om te schakelen tussen rijden en coderen. Zo kunt u uw robot programmeren om nauwkeurig onder hoeken te bewegen. U kunt indien nodig langzaam rijden, zodat u specifieke details over de hoek of afstand van de robot kunt vaststellen.
Stap 4: Gebruik het Predict-Drive-Measure-Code proces om de precisie van uw robot te verbeteren terwijl deze rond beide cilinders beweegt:
- Voorspellen
- Kies de eerste hoek die u nauwkeuriger wilt maken. Doe een groepsvoorspelling over hoe de hoek verbeterd kan worden met behulp van deze zinsbouw en noteer dit in je dagboek:
- Wij denken dat de hoek ongeveer ____________ graden moet zijn.
- Kies de eerste hoek die u nauwkeuriger wilt maken. Doe een groepsvoorspelling over hoe de hoek verbeterd kan worden met behulp van deze zinsbouw en noteer dit in je dagboek:
- Rijd
- Test uw voorspelling door uw robot in de voorspelde hoek te laten rijden. Beweegt het zoals je verwachtte? Als het niet klopt, wat moet er dan veranderen om de waarde nauwkeuriger te maken? Zo niet, wat voelt er dan wel goed aan?
- Meeteenheid
- Plaats uw robotgradenboog onder de robot. Onder welke hoek heb je de robot daadwerkelijk bestuurd?
- Code
- Gebruik je nieuwe invalshoek in je codeerproject! Pas uw project aan en voer het uit om te testen. Is de nieuwe hoek nauwkeuriger? Als dat niet lukt, gebruik dan uw Robot Protractor om de hoek te veranderen en probeer het opnieuw. Zorg ervoor dat u uw hoekmetingen en observaties in uw dagboek noteert.
Hulpmiddelen voor de praktijk:
De hier gelinkte artikelen zijn beschikbaar als u extra ondersteuning nodig hebt tijdens het voltooien van de activiteit.
Verwachtingen voor groepswerk aan het begin. Als u meer wilt weten over rollen voor samenwerking bij het coderen, bekijk dit artikel over pair programming. Stel vragen zoals:
- Hoe gaat jouw groep aan deze activiteit beginnen?
- Hoe zorg je ervoor dat iedereen zijn steentje bijdraagt aan het rijden en programmeren?
Geef elke leerling de taakkaart van stap 2 (Google / .docx / .pdf). Onthoud dat het doel van het besturen van de robot om een taak te voltooien is dat leerlingen een fysiek model van de taak ontwikkelen. Op basis hiervan bouwen ze een computermodel wanneer ze beginnen met coderen. Zorg ervoor dat alle studenten de tijd nemen die nodig is om te rijden, te documenteren en te plannen tijdens het gereden deel van de begeleide oefening. Het aanleren van goede gewoontes bij eenvoudige taken zal later van pas komen als de taken complexer worden.
Studenten worden aangemoedigd om de afgedrukte Robot Protractor te gebruiken bij het plannen van hun route. Als studenten geen toegang hebben tot een printer, print dit dan voor hen uit.
Terwijl de leerlingen hun rijpraktijk afronden, lopen er mensen door de klas en bespreken ze met hen wat ze hebben geleerd. Stel vragen zoals:
- Waar let je op tijdens het rijden waarvan je denkt dat het je zal helpen bij het programmeren? Waarom is dat belangrijk voor jou?
- Heeft iedereen op dezelfde manier gereden en gedocumenteerd? Wat is vergelijkbaar of anders? Hoe kun je jullie ideeën combineren tot een gezamenlijk padplan?
Geef elke leerling de taakkaart van stap 3 nadat ze aan de succescriteria voor het autorijden hebben voldaan en hun routeplan met u hebben gedeeld (Google / .docx / .pdf). Studenten gebruiken hun padplannen vervolgens als basis voor het bouwen van hun VEXcode-projecten. Moedig leerlingen aan om hun rijdocumentatie aan te vullen terwijl ze hun projecten bouwen en testen. Zo kunnen ze beter bepalen welke strategieën en details het nuttigst zijn. Herinner de leerlingen eraan dat ze op elk gewenst moment weer kunnen gaan autorijden. Dit kan helpen bij het succesvol coderen van hun project.
Terwijl de leerlingen bezig zijn met het programmeren van de robot, lopen er rond in de klas en gaan ze met elkaar in discussie. Zo leren ze meer over hun programmeervoortgang en hun begrip van de resultaten. Stel vragen zoals:
- Hoe laat je de robot met behulp van hoeken om obstakels heen navigeren?
- Hoe kun je het aantal blokken in dit project proberen te verminderen?
- Hoe heeft jullie groep samengewerkt om deze taak samen te volbrengen?
Stap 4 is ontworpen om de iteratie en verkenning van studenten te stimuleren door te schakelen tussen sturen en coderen om hun projecten te verbeteren en de beste strategie voor de taak te vinden. Studenten moeten het Predict-Drive-Measure-Code proces gebruiken om één ding tegelijk te verbeteren aan de beweging van hun robot, waarbij de nadruk ligt op precisie. Ze moeten het proces herhaaldelijk doorlopen om hun project te verbeteren. Om dit proces te vergemakkelijken, kunt u vragen stellen als:
- Komen de resultaten van uw test overeen met uw voorspelling? Welke aanpassingen moet u doen?
- Hoe helpt het voorspellen van de hoek voordat u gaat rijden u bij het nauwkeurig coderen van uw robot?
- Hoe helpt het afwisselen van autorijden en programmeren jou om je programmeerproject te verbeteren? Wat kunt u doen om de iteratiecyclus in uw groep te verbeteren?
- Wat hebt u gedurende dit proces in uw dagboek vastgelegd? Hoe helpt uw documentatie u tijdens het itereren?
Afronding
Nu je hebt geoefend, is het tijd om te delen wat je hebt geleerd. Beantwoord de volgende vragen in je dagboek om je te helpen reflecteren op je leerproces en je voor te bereiden op een discussie met de hele klas:
- Wat heb je geleerd tijdens het rijden dat je heeft geholpen bij het programmeren? Hoe heb je dat leren vastgelegd?
- Wat heb je geleerd over het gebruiken van minder blokken?
- Wat heb je geleerd over hoeken?
Nu je hebt geoefend, is het tijd om te delen wat je hebt geleerd. Beantwoord de volgende vragen in je dagboek om je te helpen reflecteren op je leerproces en je voor te bereiden op een discussie met de hele klas:
- Wat heb je geleerd tijdens het rijden dat je heeft geholpen bij het programmeren? Hoe heb je dat leren vastgelegd?
- Wat heb je geleerd over het gebruiken van minder blokken?
- Wat heb je geleerd over hoeken?
Begeleid leerlingen bij het delen van hun kennis in een discussie met de hele klas. De vragen die de studenten in hun dagboek beantwoorden, vormen het startpunt voor de discussie. Stel vervolgvragen om de leerlingen te helpen hun denkwijze te baseren op gedeelde inzichten. Stel vervolgens vragen als:
- Hoe heb je de hoeken en afstanden gekozen? Hoe beïnvloedden deze keuzes hoe dicht je bij het vat kon komen zonder ertegenaan te stoten?
- Wat weet je nu over het programmeren van je robot wat je voorheen niet wist? Welk bewijs heb je om dat te ondersteunen?
Voeg op basis van de input van de leerlingen codeerpraktijken toe aan de gedeelde lijst van les 1, om artefacten te creëren die het inzicht van de klas in het coderen van hun robots tot nu toe weerspiegelen.
Selecteer Volgende > om naar de volgende les te gaan.