
Ihr Projekt neu mischen
![]() Lehrertipps
Lehrertipps
Die Schüler können sich auf die Tutorials beziehen, wenn sie Probleme beim Erstellen, Umbenennen oder Speichern eines Projekts haben. Gehen Sie umher und überwachen Sie die Schüler, um sicherzustellen, dass sie alle Schritte ausführen.
Der Programmierer sollte die folgenden Schritte ausführen:

- Öffnen Sie das Menü Datei.
- Wählen Sie Beispiele öffnen.
- Wählen Sie die Autopilot-Vorlage aus und öffnen Sie sie.
- Benennen Sie Ihr Projekt Velocity Remix.
- Speichern Sie Ihr Projekt.
![]() Lehrer-Toolbox
-
Verhaltensweisen
Lehrer-Toolbox
-
Verhaltensweisen
Wie bereits erwähnt, sind Verhaltensweisen eine Möglichkeit, über die Handlungen des Roboters zu sprechen. Eine Möglichkeit, die Schüler dazu zu bringen, über Verhaltensweisen nachzudenken und Aktionen in einer Sequenz zu organisieren, besteht darin, die Schüler mit dem Block [Kommentar] verschiedene Teile ihres Projekts beschriften zu lassen. Die Schüler können die verschiedenen Verhaltensweisen der Herausforderungen während des gesamten Projekts kennzeichnen. Weitere Informationen zur Verwendung des Blocks [Kommentar] finden Sie in der Hilfe.
Im Tag You 're It! herausforderung werden die Schüler gebeten, den Autopiloten so zu programmieren, dass er sich schnell dreht, um nicht markiert zu werden, langsam zu fahren, um jemanden zu markieren, und sich dann schnell wieder zu drehen, um wegzulaufen. Sehen Sie sich das folgende Beispiel für die Verwendung des Kommentarblocks an, um die Abfolge der Verhaltensweisen zu beschreiben:

Sie können die Schüler auch bitten zu erklären, wie sie diese Herausforderungen in Bezug darauf planen, wie sie sich den Roboter wünschen und erwarten.
Tag You 're It!
Drehen Sie schnell, fahren Sie langsam, drehen Sie schnell, um ein Tag-Spiel zu spielen!
-
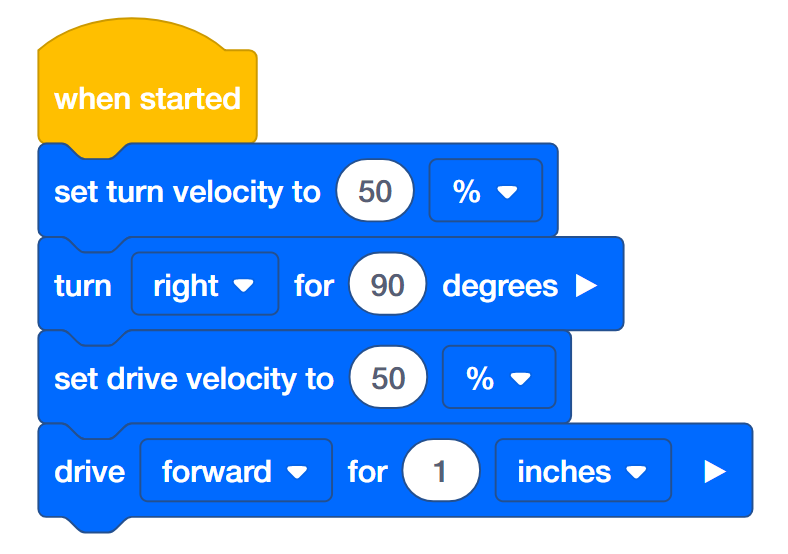
Der Roboter möchte ein Tag-Spiel spielen - dubist es! Programmierer, verwenden Sie die Blöcke [Set Turn Velocity], [Turn for], [Set Drive Velocity] und [Drive for], um den Autopiloten so zu programmieren, dass er sich schnell dreht, um nicht markiert zu werden, fahren Sie langsam, um jemanden zu markieren, und drehen Sie sich dann schnell wieder, um wegzulaufen! Der Geschwindigkeitsprozentsatz für das Drehen sollte mindestens doppelt so hoch sein wie der Geschwindigkeitsprozentsatz für das Fahren. Das folgende Projekt wurde gestartet, ist aber unvollständig. Es braucht mehr Blöcke und eingestellte Geschwindigkeiten.
- Programmierer, speichere das Tag-Projekt und lade es ins Gehirn herunter.
- Operator, führen Sie das Tag-Projekt aus.
- Dreht sich der Roboter schnell, fährt langsam und dreht sich dann wieder schnell?
- Recorder, machen Sie sich Notizen über das Verhalten des Roboters.
Bonus-Herausforderung: Lass den Autopiloten einen Ton abspielen, sobald er jemanden markiert!
![]() Lehrer-Toolbox
-
Erinnerungen und Lösungen
Lehrer-Toolbox
-
Erinnerungen und Lösungen
-
Richten Sie ein stationäres Objekt wie ein Buch ein, das der Roboter markiert, um das Markieren einer Person nachzuahmen.
-
Der Lehrer kann die Fahrstrecken begrenzen, wenn der Platz begrenzt ist.
-
Die Studierenden sollten in ihren Gruppen mit ihren individuellen Rollen arbeiten.
-
Der Bauherr sollte überprüfen, ob der Roboter bereit ist, das Projekt auszuführen.
-
Der Programmierer sollte die Änderungen wie angewiesen vornehmen.
-
Der Bediener sollte die Projekte auf dem Roboter ausführen.
-
Der Recorder sollte seine Arbeit und Ergebnisse in seinen technischen Notizbüchern dokumentieren.
-
Lassen Sie die Schüler einchecken, wenn sie diese Aktivität abgeschlossen haben, und zeigen Sie ihre Projekte entweder an oder führen Sie sie aus.
Klicken Sie für die Lösung von Tag You 're It! auf einen der folgenden Links (Google Doc/.docx/.pdf).
Beschütze das Schloss!
Bewege dich auf einem Platz, um die Burg vor Eindringlingen zu schützen!
-
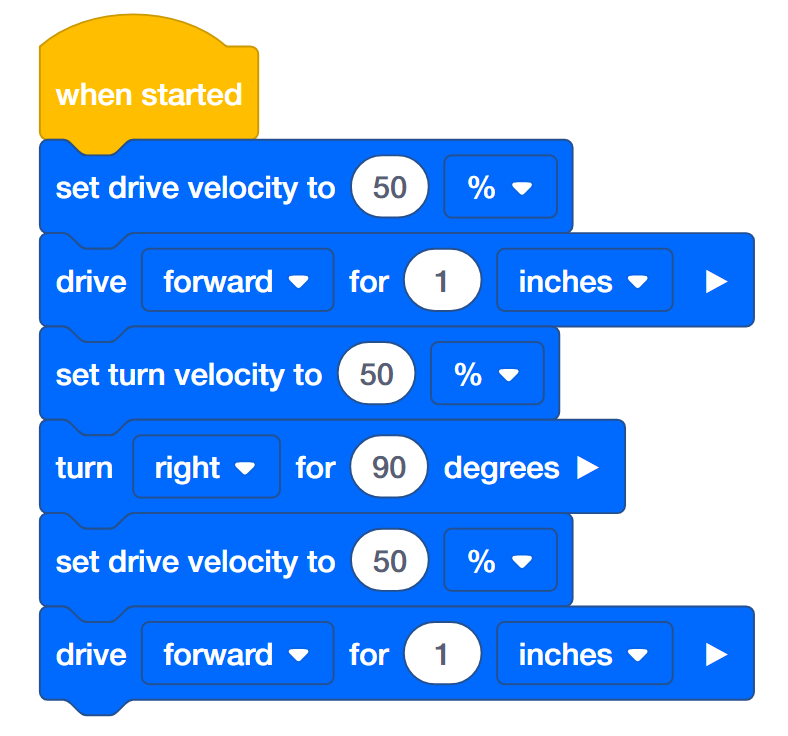
Dein König hat dich gebeten, das Schloss zu beschützen! Du musst um die quadratische Burg herumfahren, um sicherzustellen, dass sie vor Eindringlingen sicher ist! Programmierer, verwenden Sie die eingestellte Drehgeschwindigkeit, drehen Sie für, stellen Sie die Antriebsgeschwindigkeit ein und fahren Sie für Blöcke, um den Autopiloten so zu programmieren, dass er sich in einem Quadrat bewegt. Der Autopilot sollte schnell entlang der Seiten des Platzes fahren, sich aber an den Ecken langsam drehen. Das folgende Projekt wurde gestartet, ist aber unvollständig. Es braucht mehr Blöcke und eingestellte Geschwindigkeiten.
- Programmierer, speichere das Castle-Projekt und lade es ins Gehirn herunter.
- Operator, führe das Schloss-Projekt aus.
- Bewegt sich der Roboter schnell in einer quadratischen Form, dreht sich aber langsam an den Ecken?
- Recorder, machen Sie sich Notizen über das Verhalten des Roboters.
Bonus-Herausforderungen:
- Lassen Sie die Touch-LED des Autopiloten eine andere Farbe anzeigen, während er auf jeder Seite des Quadrats fährt.
- Der Umfang der quadratischen Burg, die bewacht werden muss, beträgt 20 Zoll. Programmieren Sie den Roboter so, dass er sich im Umkreis bewegt.
- Die Fläche der quadratischen Burg, die bewacht werden muss, beträgt 49 Zoll. Berechnen Sie die Länge jeder Seite und bewegen Sie sich in einem Quadrat, das den Bereich abdeckt.
![]() Lehrer-Toolbox
-
Erinnerungen und Lösungen
Lehrer-Toolbox
-
Erinnerungen und Lösungen
-
Der Lehrer kann die Fahrstrecken begrenzen, wenn der Platz begrenzt ist.
-
Die Studierenden sollten in ihren Gruppen mit ihren individuellen Rollen arbeiten.
-
Der Bauherr sollte überprüfen, ob der Roboter bereit ist, das Projekt auszuführen.
-
Der Programmierer sollte die Änderungen wie angewiesen vornehmen.
-
Der Bediener sollte die Projekte auf dem Roboter ausführen.
-
Der Recorder sollte seine Arbeit und Ergebnisse in seinen technischen Notizbüchern dokumentieren.
-
Lassen Sie die Schüler einchecken, wenn sie diese Aktivität abgeschlossen haben, und zeigen Sie ihre Projekte entweder an oder führen Sie sie aus.
Für die Lösungen zum Schutz der Burg! klicken Sie auf einen der folgenden Links (Google Doc/.docx/.pdf).
Roboter-Kellner
Verschütten Sie die Getränke nicht!
-
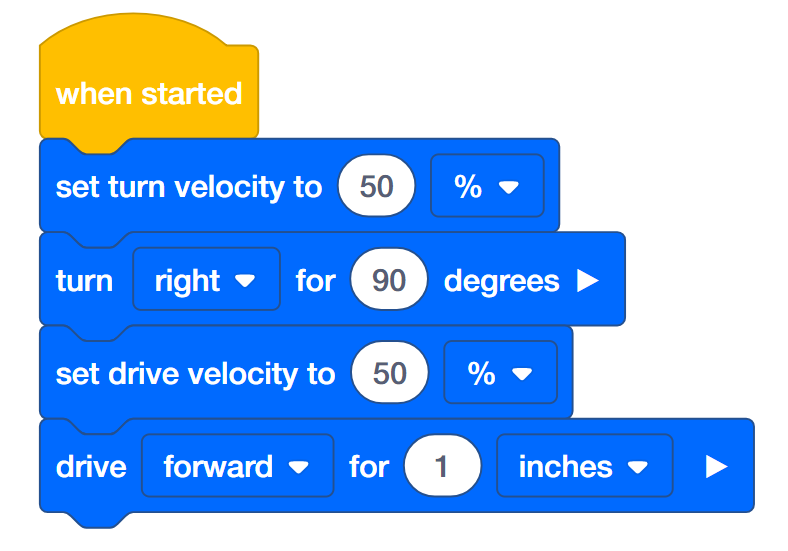
Dein Roboter trainiert, um Kellner in einem neuen Restaurant in der Stadt zu werden. Programmieren Sie den Roboterkellner so, dass er sich schnell bewegen kann, ohne zu verschütten, was er trägt! Verwenden Sie den 6-fachen Abstandshalter, um Speisen oder Getränke zu simulieren, die der Kellner tragen würde. Programmierer, verwenden Sie die eingestellte Drehgeschwindigkeit, drehen Sie für, stellen Sie die Antriebsgeschwindigkeit ein und fahren Sie für Blöcke, um den Autopiloten so zu programmieren, dass er sich um 360 Grad dreht und 12 Zoll so schnell wie möglich fährt, während Sie einen 6-fachen Abstand im Gehirn des Autopiloten ausgleichen. Das folgende Projekt wurde gestartet, ist aber unvollständig. Es müssen die Geschwindigkeiten und Entfernungen eingestellt sein.
-
Builder, legen Sie einen 6-fachen Abstand vom vex IQ Kit über die Stelle, an der der vex IQ auf das Gehirn geschrieben ist.

- Programmierer, stellen Sie die Geschwindigkeiten und Entfernungen ein. Speichern Sie dann das Projekt Robot Waiter und laden Sie es ins Gehirn herunter.
- Operator, führen Sie das Robot Waiter-Projekt aus.
- Dreht und fährt der Roboter, während der Strahl oben auf dem Gehirn bleibt? Wie schnell kann sich der Roboter bewegen, bevor der Strahl abrutscht?
- Programmierer, testen Sie immer schnellere Geschwindigkeiten, bis Sie das Limit gefunden haben. Die Grenze für das Abbiegen kann von der Grenze für das Fahren abweichen. Verwenden Sie die Informationen aus dem Recorder, um zu entscheiden, welche Geschwindigkeit die beste Wahl ist.
- Rekorder, machen Sie sich Notizen über das Verhalten des Roboters, seine Geschwindigkeit und ob der Strahl abfällt. Notieren Sie sich, wie sich die Geschwindigkeiten jedes Mal ändern, wenn das Projekt getestet wird.
![]() Lehrer-Toolbox
-
Iteratives Design
Lehrer-Toolbox
-
Iteratives Design
Diese Aktivität konzentriert sich darauf, die Schüler zu bitten, sich an einem iterativen Designprozess zu beteiligen. Die Schüler werden gebeten, ihre Projekte zu testen, bevor sie Änderungen vornehmen. Ermutigen Sie die Schüler, vollständig zu entwerfen, zu testen, basierend auf Feedback Änderungen vorzunehmen und erneut zu testen. Die Anpassungen der Geschwindigkeit sollten auf den Ergebnissen der Tests und/oder dem Feedback der anderen Gruppenmitglieder basieren. Ermutigen Sie die Schüler, dem iterativen Designprozess zu folgen, anstatt nur zu raten und zu überprüfen, um zu einer Schlussfolgerung zu kommen, welche Geschwindigkeit am besten ist. Die beste Geschwindigkeit stellt sicher, dass der Roboterkellner nichts verschüttet.
Iteratives Design ist eine wichtige Entwurfsmethodik in der Robotik sowie in anderen Konstruktionsdesignprozessen.
Die Schüler üben auch abstraktes Denken und entscheiden, wie sie die Geschwindigkeit anpassen können, um zu dem Schluss zu kommen, welche die beste ist.
![]() Lehrer-Toolbox
-
Erinnerungen und Lösungen
Lehrer-Toolbox
-
Erinnerungen und Lösungen
- Der Lehrer kann die Fahrstrecken begrenzen, wenn der Platz begrenzt ist.
- Die Studierenden sollten in ihren Gruppen mit ihren individuellen Rollen arbeiten.
-
Der Erbauer sollte vor jedem Test der Geschwindigkeit überprüfen, ob der Roboter für die Ausführung des Projekts vorbereitet ist und ob der 6-fache Abstandshalter über dem vex IQ-Aufkleber auf dem Gehirn richtig positioniert ist.

- Der Programmierer sollte die Änderungen wie angewiesen vornehmen.
- Der Bediener sollte die Projekte auf dem Roboter ausführen.
- Der Recorder sollte seine Arbeit und Ergebnisse in seinen technischen Notizbüchern dokumentieren.
-
Lassen Sie die Schüler einchecken, wenn sie diese Aktivität abgeschlossen haben, und zeigen Sie ihre Projekte entweder an oder führen Sie sie aus.
Für die Lösung zu Robot Waiter klicken Sie auf einen der folgenden Links (Google Doc/.docx/.pdf)