
നിങ്ങളുടെ പ്രോജക്റ്റ് റീമിക്സ് ചെയ്യുക
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുന്നതിനോ, പേരുമാറ്റുന്നതിനോ, സംരക്ഷിക്കുന്നതിനോ എന്തെങ്കിലും പ്രശ്നങ്ങൾ നേരിടുന്നുണ്ടെങ്കിൽ വിദ്യാർത്ഥികൾക്ക് ട്യൂട്ടോറിയലുകൾ റഫർ ചെയ്യാവുന്നതാണ്. വിദ്യാർത്ഥികൾ എല്ലാ ഘട്ടങ്ങളും പൂർത്തിയാക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കാൻ ചുറ്റും നടന്ന് അവരെ നിരീക്ഷിക്കുക.
പ്രോഗ്രാമർ ഇനിപ്പറയുന്ന ഘട്ടങ്ങൾ പൂർത്തിയാക്കണം:

- ഫയൽ മെനു തുറക്കുക.
- തിരഞ്ഞെടുക്കുക ഉദാഹരണങ്ങൾതുറക്കുക.
- ഓട്ടോപൈലറ്റ് ടെംപ്ലേറ്റ്തിരഞ്ഞെടുത്ത് തുറക്കുക.
- നിങ്ങളുടെ പ്രോജക്റ്റിന് പേര് നൽകുക വെലോസിറ്റി റീമിക്സ്.
- നിങ്ങളുടെ പ്രോജക്റ്റ് സംരക്ഷിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പെരുമാറ്റരീതികൾ
ടീച്ചർ ടൂൾബോക്സ്
-
പെരുമാറ്റരീതികൾ
മുമ്പ് സൂചിപ്പിച്ചതുപോലെ, പെരുമാറ്റങ്ങൾ റോബോട്ടിന്റെ പ്രവർത്തനങ്ങളെക്കുറിച്ച് സംസാരിക്കാനുള്ള ഒരു മാർഗമാണ്. പെരുമാറ്റങ്ങളെക്കുറിച്ചും പ്രവർത്തനങ്ങളെ ഒരു ക്രമത്തിൽ ക്രമീകരിക്കുന്നതിനെക്കുറിച്ചും വിദ്യാർത്ഥികളെ ചിന്തിപ്പിക്കുന്നതിനുള്ള ഒരു മാർഗം, [അഭിപ്രായം] ബ്ലോക്ക് ഉപയോഗിച്ച് അവരുടെ പ്രോജക്റ്റിന്റെ വിവിധ ഭാഗങ്ങൾ ലേബൽ ചെയ്യുക എന്നതാണ്. പ്രോജക്റ്റിലുടനീളം നേരിടുന്ന വെല്ലുവിളികളിൽ നിന്ന് വ്യത്യസ്തമായ പെരുമാറ്റരീതികൾ വിദ്യാർത്ഥികൾക്ക് ലേബൽ ചെയ്യാൻ കഴിയും. [comment] ബ്ലോക്ക് ഉപയോഗിക്കുന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, You're It! എന്ന ടാഗിലെ Help
ഉപയോഗിക്കുക. വെല്ലുവിളി ഉയർത്തുന്ന ഈ ഘട്ടത്തിൽ, ടാഗ് ചെയ്യപ്പെടാതിരിക്കാൻ വേഗത്തിൽ തിരിയാനും, ആരെയെങ്കിലും ടാഗ് ചെയ്യാൻ പതുക്കെ വാഹനമോടിക്കാനും, പിന്നീട് വേഗത്തിൽ വീണ്ടും തിരിയാനും ഓട്ടോപൈലറ്റ് പ്രോഗ്രാം ചെയ്യാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുന്നു. പെരുമാറ്റങ്ങളുടെ ക്രമം വിവരിക്കുന്നതിന് കമന്റ് ബ്ലോക്ക് ഉപയോഗിക്കുന്നതിന്റെ താഴെയുള്ള ഉദാഹരണം കാണുക:

റോബോട്ട് എങ്ങനെ പെരുമാറണമെന്ന് അവർ ആഗ്രഹിക്കുന്നുവെന്നും പ്രതീക്ഷിക്കുന്നുവെന്നും കണക്കിലെടുത്ത് ഈ വെല്ലുവിളികളെ എങ്ങനെ ആസൂത്രണം ചെയ്യുമെന്ന് വിശദീകരിക്കാൻ നിങ്ങൾക്ക് വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടാം.
"നീയാണ് അത്!" എന്ന് ടാഗ് ചെയ്യുക.
വേഗം തിരിയൂ, പതുക്കെ വണ്ടി ഓടിക്കൂ, ടാഗ് ഗെയിം കളിക്കാൻ വേഗം തിരിയൂ!
-
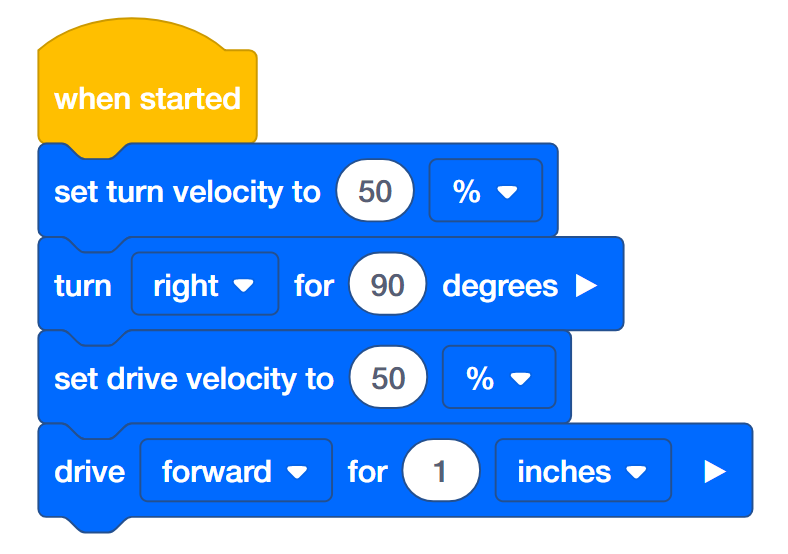
റോബോട്ട് "നീയാണ് അത്" എന്നൊരു ഗെയിം കളിക്കാൻ ആഗ്രഹിക്കുന്നു! പ്രോഗ്രാമർ, [ടേൺ പ്രവേഗം സജ്ജമാക്കുക], [ടേൺ ഫോർ], [ഡ്രൈവ് പ്രവേഗം സജ്ജമാക്കുക], [ഡ്രൈവ് ഫോർ] ബ്ലോക്കുകൾ ഉപയോഗിച്ച് ഓട്ടോപൈലറ്റ് ടാഗ് ചെയ്യപ്പെടാതിരിക്കാൻ വേഗത്തിൽ തിരിയാൻ പ്രോഗ്രാം ചെയ്യുക, ആരെയെങ്കിലും ടാഗ് ചെയ്യാൻ പതുക്കെ ഡ്രൈവ് ചെയ്യുക, തുടർന്ന് വേഗത്തിൽ വീണ്ടും തിരിയുക! തിരിയുമ്പോൾ വേഗതയുടെ ശതമാനം, വാഹനമോടിക്കുമ്പോൾ വേഗതയുടെ ശതമാനത്തിന്റെ ഇരട്ടിയെങ്കിലും കൂടുതലായിരിക്കണം. താഴെയുള്ള പദ്ധതി ആരംഭിച്ചെങ്കിലും അപൂർണ്ണമാണ്. ഇതിന് കൂടുതൽ ബ്ലോക്കുകളും സെറ്റ് വെലോസിറ്റികളും ആവശ്യമാണ്.
- പ്രോഗ്രാമർ, ടാഗ് പ്രോജക്റ്റ് സേവ് ചെയ്ത് ഡൗൺലോഡ് അത് തലച്ചോറിലേക്ക് മാറ്റുക.
- ഓപ്പറേറ്റർ, റൺ ദി ടാഗ് പ്രോജക്റ്റ്.
- റോബോട്ട് വേഗത്തിൽ തിരിയുമോ, പതുക്കെ ഓടിച്ചിട്ട് വീണ്ടും വേഗത്തിൽ തിരിയുമോ?
- റെക്കോർഡർ, റോബോട്ടിന്റെ പെരുമാറ്റത്തെക്കുറിച്ച് കുറിപ്പുകൾ എടുക്കുക.
ബോണസ് ചലഞ്ച്: ആരെയെങ്കിലും ടാഗ് ചെയ്തുകഴിഞ്ഞാൽ ഓട്ടോപൈലറ്റ് ഒരു ശബ്ദം പ്ലേ ചെയ്യട്ടെ!
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഓർമ്മപ്പെടുത്തലുകളും പരിഹാരങ്ങളും
ടീച്ചർ ടൂൾബോക്സ്
-
ഓർമ്മപ്പെടുത്തലുകളും പരിഹാരങ്ങളും
-
ഒരു വ്യക്തിയെ ടാഗ് ചെയ്യുന്നത് അനുകരിക്കാൻ റോബോട്ട് ടാഗ് ചെയ്യുന്ന ഒരു പുസ്തകം പോലുള്ള ഒരു നിശ്ചല വസ്തു സജ്ജീകരിക്കുക.
-
സ്ഥലപരിമിതി ഉണ്ടെങ്കിൽ അധ്യാപകന് ഡ്രൈവ് ദൂരം പരിമിതപ്പെടുത്താൻ കഴിയും.
-
വിദ്യാർത്ഥികൾ അവരുടെ ഗ്രൂപ്പുകളിൽ അവരുടെ വ്യക്തിഗത റോളുകളുമായി പ്രവർത്തിക്കണം.
-
പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കാൻ റോബോട്ട് തയ്യാറാണോ എന്ന് ബിൽഡർ പരിശോധിക്കണം.
-
പ്രോഗ്രാമർ നിർദ്ദേശിച്ച പ്രകാരം മാറ്റങ്ങൾ വരുത്തണം.
-
ഓപ്പറേറ്റർ ആയിരിക്കണം റോബോട്ടിലെ പ്രോജക്ടുകൾ പ്രവർത്തിപ്പിക്കേണ്ടത്.
-
റെക്കോർഡർ അവരുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകളിൽ അവരുടെ ജോലിയും ഫലങ്ങളും രേഖപ്പെടുത്തണം.
-
ഈ പ്രവർത്തനം പൂർത്തിയാക്കി കഴിയുമ്പോൾ വിദ്യാർത്ഥികളെക്കൊണ്ട് ചെക്ക് ഇൻ ചെയ്യിപ്പിക്കുക, അവരുടെ പ്രോജക്റ്റ്(കൾ) പ്രദർശിപ്പിക്കുകയോ പ്രവർത്തിപ്പിക്കുകയോ ചെയ്യുക.
Tag You're It! എന്നതിനുള്ള പരിഹാരത്തിനായി, ഇനിപ്പറയുന്ന ലിങ്കുകളിൽ ഒന്നിൽ ക്ലിക്ക് ചെയ്യുക (Google Doc/.docx/.pdf).
കോട്ട സംരക്ഷിക്കുക!
നുഴഞ്ഞുകയറ്റക്കാരിൽ നിന്ന് കോട്ടയെ സംരക്ഷിക്കാൻ ഒരു ചതുരത്തിലേക്ക് നീങ്ങുക!
-
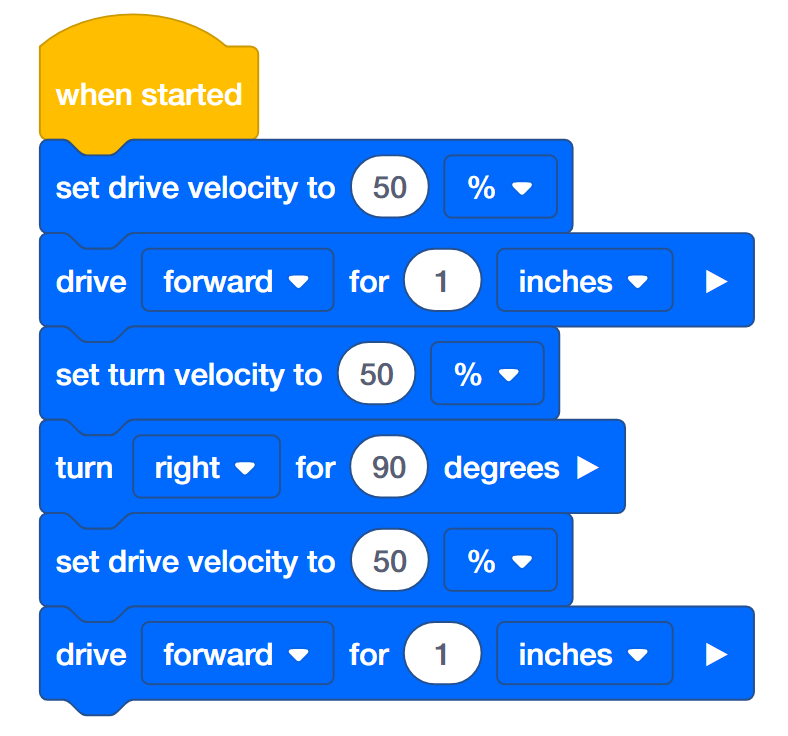
നിങ്ങളുടെ രാജാവ് നിങ്ങളോട് കോട്ട സംരക്ഷിക്കാൻ ആവശ്യപ്പെട്ടു! നുഴഞ്ഞുകയറ്റക്കാരിൽ നിന്ന് സുരക്ഷിതമാണെന്ന് ഉറപ്പാക്കാൻ നിങ്ങൾ ചതുരാകൃതിയിലുള്ള കോട്ടയ്ക്ക് ചുറ്റും വാഹനമോടിക്കണം! പ്രോഗ്രാമർ, ഓട്ടോപൈലറ്റ് ഒരു ചതുരത്തിൽ ചലിപ്പിക്കുന്നതിന് പ്രോഗ്രാം ചെയ്യുന്നതിന് സെറ്റ് ടേൺ പ്രവേഗം, ടേൺ ഫോർ, സെറ്റ് ഡ്രൈവ് പ്രവേഗം, ബ്ലോക്കുകൾക്ക് ഡ്രൈവ് എന്നിവ ഉപയോഗിക്കുക. ഓട്ടോപൈലറ്റ് സ്ക്വയറിന്റെ വശങ്ങളിലൂടെ വേഗത്തിൽ വാഹനമോടിക്കണം, പക്ഷേ മൂലകളിൽ സാവധാനം തിരിയണം. താഴെയുള്ള പദ്ധതി ആരംഭിച്ചെങ്കിലും അപൂർണ്ണമാണ്. ഇതിന് കൂടുതൽ ബ്ലോക്കുകളും സെറ്റ് വെലോസിറ്റികളും ആവശ്യമാണ്.
- പ്രോഗ്രാമർ, കാസിൽ പ്രോജക്റ്റ് സേവ് ചെയ്ത് ഡൗൺലോഡ് അത് തലച്ചോറിലേക്ക്.
- ഓപ്പറേറ്റർ, റൺ കാസിൽ പ്രോജക്റ്റ്.
- റോബോട്ട് ചതുരാകൃതിയിൽ വേഗത്തിൽ ചലിക്കുകയും മൂലകളിൽ പതുക്കെ തിരിയുകയും ചെയ്യുമോ?
- റെക്കോർഡർ, റോബോട്ടിന്റെ പെരുമാറ്റത്തെക്കുറിച്ച് കുറിപ്പുകൾ എടുക്കുക.
ബോണസ് വെല്ലുവിളികൾ:
- സ്ക്വയറിന്റെ ഇരുവശത്തും ഡ്രൈവ് ചെയ്യുമ്പോൾ ഓട്ടോപൈലറ്റിന്റെ ടച്ച് എൽഇഡി ഡിസ്പ്ലേ വ്യത്യസ്ത നിറങ്ങളിൽ കാണിക്കുക.
- ചതുരാകൃതിയിലുള്ള കൊട്ടാരത്തിന് സംരക്ഷിക്കേണ്ട ചുറ്റളവ് 20 ഇഞ്ച് ആണ്. ചുറ്റളവിൽ സഞ്ചരിക്കാൻ റോബോട്ടിനെ പ്രോഗ്രാം ചെയ്യുക.
- ചതുരാകൃതിയിലുള്ള കൊട്ടാരത്തിന് സംരക്ഷിക്കേണ്ട വിസ്തീർണ്ണം 49 ഇഞ്ച് ആണ്. ഓരോ വശത്തിന്റെയും നീളം കണക്കാക്കി ആ വിസ്തീർണ്ണം ഉൾക്കൊള്ളുന്ന ഒരു ചതുരത്തിൽ നീക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഓർമ്മപ്പെടുത്തലുകളും പരിഹാരങ്ങളും
ടീച്ചർ ടൂൾബോക്സ്
-
ഓർമ്മപ്പെടുത്തലുകളും പരിഹാരങ്ങളും
-
സ്ഥലപരിമിതി ഉണ്ടെങ്കിൽ അധ്യാപകന് ഡ്രൈവ് ദൂരം പരിമിതപ്പെടുത്താൻ കഴിയും.
-
വിദ്യാർത്ഥികൾ അവരുടെ ഗ്രൂപ്പുകളിൽ അവരുടെ വ്യക്തിഗത റോളുകളുമായി പ്രവർത്തിക്കണം.
-
പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കാൻ റോബോട്ട് തയ്യാറാണോ എന്ന് ബിൽഡർ പരിശോധിക്കണം.
-
പ്രോഗ്രാമർ നിർദ്ദേശിച്ച പ്രകാരം മാറ്റങ്ങൾ വരുത്തണം.
-
ഓപ്പറേറ്റർ ആയിരിക്കണം റോബോട്ടിലെ പ്രോജക്ടുകൾ പ്രവർത്തിപ്പിക്കേണ്ടത്.
-
റെക്കോർഡർ അവരുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകളിൽ അവരുടെ ജോലിയും ഫലങ്ങളും രേഖപ്പെടുത്തണം.
-
ഈ പ്രവർത്തനം പൂർത്തിയാക്കി കഴിയുമ്പോൾ വിദ്യാർത്ഥികളെക്കൊണ്ട് ചെക്ക് ഇൻ ചെയ്യിപ്പിക്കുക, അവരുടെ പ്രോജക്റ്റ്(കൾ) പ്രദർശിപ്പിക്കുകയോ പ്രവർത്തിപ്പിക്കുകയോ ചെയ്യുക.
പ്രൊട്ടക്റ്റ് ദി കാസിൽ! എന്നതിനുള്ള പരിഹാരങ്ങൾക്ക്, ഇനിപ്പറയുന്ന ലിങ്കുകളിൽ ഒന്നിൽ ക്ലിക്ക് ചെയ്യുക (Google Doc/.docx/.pdf).
റോബോട്ട് വെയ്റ്റർ
പാനീയങ്ങൾ ചോരരുത്!
-
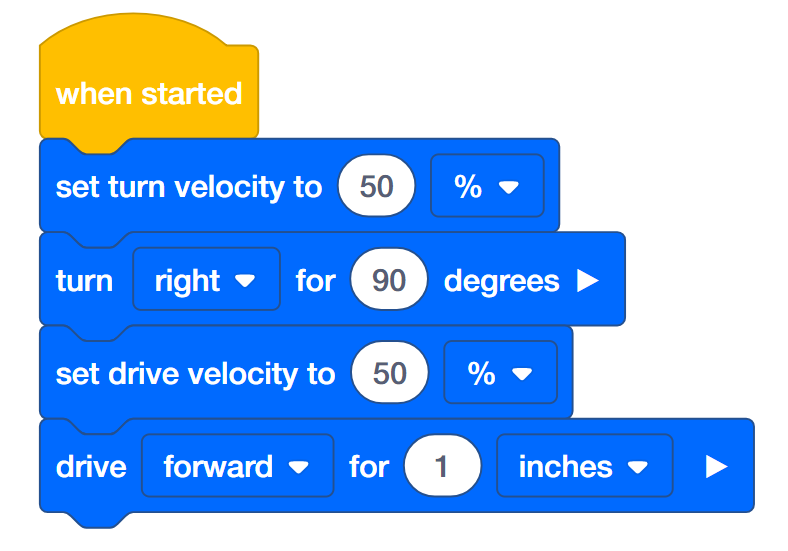
നിങ്ങളുടെ റോബോട്ട് നഗരത്തിലെ ഒരു പുതിയ റെസ്റ്റോറന്റിൽ വെയിറ്ററാകാൻ പരിശീലനം നേടുകയാണ്. റോബോട്ട് വെയിറ്ററെ അത് വഹിക്കുന്നത് കളയാതെ വേഗത്തിൽ നീങ്ങാൻ കഴിയുന്ന തരത്തിൽ പ്രോഗ്രാം ചെയ്യുക! വെയിറ്റർ കൊണ്ടുപോകുന്ന ഭക്ഷണപാനീയങ്ങൾ അനുകരിക്കാൻ 6x പിച്ച് സ്റ്റാൻഡ്ഓഫ് ഉപയോഗിക്കുക. പ്രോഗ്രാമർ, സെറ്റ് ടേൺ പ്രവേഗം, ടേൺ പ്രവേഗം, സെറ്റ് ഡ്രൈവ് പ്രവേഗം, ബ്ലോക്കുകൾക്ക് ഡ്രൈവ് എന്നിവ ഉപയോഗിച്ച് ഓട്ടോപൈലറ്റിനെ 360 ഡിഗ്രി തിരിക്കാനും 12 ഇഞ്ച് വേഗത്തിൽ ഡ്രൈവ് ചെയ്യാനും ഓട്ടോപൈലറ്റിന്റെ തലച്ചോറിൽ 6x പിച്ച് സ്റ്റാൻഡ്ഓഫ് ബാലൻസ് ചെയ്യാനും പ്രോഗ്രാം ചെയ്യുക. താഴെയുള്ള പദ്ധതി ആരംഭിച്ചെങ്കിലും അപൂർണ്ണമാണ്. അതിന് വേഗതയും ദൂരവും സജ്ജമാക്കേണ്ടതുണ്ട്.
-
ബിൽഡർ, VEX IQ കിറ്റിൽ നിന്ന് 6x പിച്ച് സ്റ്റാൻഡ്ഓഫ് സ്ഥാപിക്കുക, അവിടെ VEX IQ തലച്ചോറിൽ എഴുതിയിരിക്കുന്നു.

- പ്രോഗ്രാമർ, വേഗതയും ദൂരവും സജ്ജമാക്കുക. പിന്നെ റോബോട്ട് വെയ്റ്റർ പ്രോജക്റ്റ് സേവ് ചെയ്ത് തലച്ചോറിലേക്ക് ഡൗൺലോഡ് ചെയ്യുക.
- ഓപ്പറേറ്റർ, റൺ റോബോട്ട് വെയ്റ്റർ പ്രോജക്റ്റ്.
- തലച്ചോറിനു മുകളിൽ ബീം വച്ചുകൊണ്ട് റോബോട്ട് തിരിഞ്ഞ് വാഹനമോടിക്കുന്നുണ്ടോ? ബീം തെന്നിമാറുന്നതിന് മുമ്പ് റോബോട്ടിന് എത്ര വേഗത്തിൽ നീങ്ങാൻ കഴിയും?
- പ്രോഗ്രാമർ, പരിധി കണ്ടെത്തുന്നത് വരെ വേഗതയേറിയതും വേഗതയേറിയതുമായ വേഗതകൾ പരീക്ഷിക്കുക. തിരിയുന്നതിനുള്ള പരിധി ഡ്രൈവിംഗിന്റെ പരിധിയിൽ നിന്ന് വ്യത്യസ്തമായിരിക്കാം. ഏത് വേഗതയാണ് ഏറ്റവും നല്ല ചോയിസെന്ന് തീരുമാനിക്കുന്നതിന് റെക്കോർഡറിൽ നിന്നുള്ള വിവരങ്ങൾ ഉപയോഗിക്കുക.
- റെക്കോർഡർ, റോബോട്ടിന്റെ പെരുമാറ്റം, അതിന്റെ വേഗത, ബീം വീഴുമോ എന്നതിനെക്കുറിച്ച് കുറിപ്പുകൾ എടുക്കുക. ഓരോ തവണ പ്രോജക്റ്റ് പരീക്ഷിക്കുമ്പോഴും വേഗത എങ്ങനെ മാറുന്നുവെന്ന് ശ്രദ്ധിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ആവർത്തന രൂപകൽപ്പന
ടീച്ചർ ടൂൾബോക്സ്
-
ആവർത്തന രൂപകൽപ്പന
വിദ്യാർത്ഥികളോട് ആവർത്തിച്ചുള്ള ഡിസൈൻ പ്രക്രിയയിൽ ഏർപ്പെടാൻ ആവശ്യപ്പെടുന്നതിലാണ് ഈ പ്രവർത്തനം ശ്രദ്ധ കേന്ദ്രീകരിക്കുന്നത്. മാറ്റങ്ങൾ വരുത്തുന്നതിനുമുമ്പ് വിദ്യാർത്ഥികളോട് അവരുടെ പ്രോജക്ടുകൾ പരീക്ഷിക്കാൻ ആവശ്യപ്പെടുന്നു. വിദ്യാർത്ഥികളെ പൂർണ്ണമായും രൂപകൽപ്പന ചെയ്യാനും, പരീക്ഷിക്കാനും, ഫീഡ്ബാക്കിന്റെ അടിസ്ഥാനത്തിൽ മാറ്റങ്ങൾ വരുത്താനും, വീണ്ടും പരീക്ഷിക്കാനും പ്രോത്സാഹിപ്പിക്കുക. പ്രവേഗത്തിലെ ക്രമീകരണങ്ങൾ പരിശോധനകളുടെ ഫലങ്ങളുടെയും/അല്ലെങ്കിൽ മറ്റ് ഗ്രൂപ്പ് അംഗങ്ങളിൽ നിന്നുള്ള ഫീഡ്ബാക്കിന്റെയും അടിസ്ഥാനത്തിലായിരിക്കണം. ഏത് പ്രവേഗമാണ് ഏറ്റവും നല്ലതെന്ന് ഊഹിച്ച് പരിശോധിച്ച് നിഗമനത്തിലെത്തുന്നതിനുപകരം ആവർത്തന രൂപകൽപ്പന പ്രക്രിയ പിന്തുടരാൻ വിദ്യാർത്ഥികളെ പ്രോത്സാഹിപ്പിക്കുക. ഏറ്റവും മികച്ച വേഗത റോബോട്ട് വെയിറ്റർ ഒന്നും ചോർത്തിക്കളയുന്നില്ലെന്ന് ഉറപ്പാക്കും.
റോബോട്ടിക്സിലും മറ്റ് എഞ്ചിനീയറിംഗ് ഡിസൈൻ പ്രക്രിയകളിലും ആവർത്തന രൂപകൽപ്പന ഒരു പ്രധാന ഡിസൈൻ രീതിശാസ്ത്രമാണ്.
ഏതാണ് മികച്ചതെന്ന് നിഗമനം ചെയ്യുന്നതിന് വേഗത എങ്ങനെ ക്രമീകരിക്കാമെന്ന് തീരുമാനിക്കുന്നതിനിടയിൽ വിദ്യാർത്ഥികൾ അമൂർത്തമായ ന്യായവാദം പരിശീലിക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
ഓർമ്മപ്പെടുത്തലുകളും പരിഹാരങ്ങളും
ടീച്ചർ ടൂൾബോക്സ്
-
ഓർമ്മപ്പെടുത്തലുകളും പരിഹാരങ്ങളും
- സ്ഥലപരിമിതി ഉണ്ടെങ്കിൽ അധ്യാപകന് ഡ്രൈവ് ദൂരം പരിമിതപ്പെടുത്താൻ കഴിയും.
- വിദ്യാർത്ഥികൾ അവരുടെ ഗ്രൂപ്പുകളിൽ അവരുടെ വ്യക്തിഗത റോളുകളുമായി പ്രവർത്തിക്കണം.
-
ഓരോ പ്രവേഗ പരിശോധനയ്ക്കും മുമ്പായി, റോബോട്ട് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കാൻ തയ്യാറാണോ എന്നും 6x പിച്ച് സ്റ്റാൻഡ്ഓഫ് തലച്ചോറിലെ VEX IQ ഡെക്കലിന് മുകളിൽ ശരിയായി സ്ഥാപിച്ചിട്ടുണ്ടോ എന്നും ബിൽഡർ പരിശോധിക്കണം.

- പ്രോഗ്രാമർ നിർദ്ദേശിച്ച പ്രകാരം മാറ്റങ്ങൾ വരുത്തണം.
- ഓപ്പറേറ്റർ ആയിരിക്കണം റോബോട്ടിലെ പ്രോജക്ടുകൾ പ്രവർത്തിപ്പിക്കേണ്ടത്.
- റെക്കോർഡർ അവരുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകളിൽ അവരുടെ ജോലിയും ഫലങ്ങളും രേഖപ്പെടുത്തണം.
-
ഈ പ്രവർത്തനം പൂർത്തിയാക്കി കഴിയുമ്പോൾ വിദ്യാർത്ഥികളെ ചെക്ക് ഇൻ ചെയ്യിപ്പിക്കുക, അവരുടെ പ്രോജക്റ്റ്(കൾ) പ്രദർശിപ്പിക്കുകയോ പ്രവർത്തിപ്പിക്കുകയോ ചെയ്യുക.
റോബോട്ട് വെയ്റ്ററിനുള്ള പരിഹാരത്തിനായി, ഇനിപ്പറയുന്ന ലിങ്കുകളിൽ ഒന്നിൽ ക്ലിക്ക് ചെയ്യുക (Google Doc/.docx/.pdf)