
Remezcla tu proyecto
![]() Consejos para profesores
Consejos para profesores
Los estudiantes pueden consultar los tutoriales si tienen algún problema para crear, cambiar el nombre o guardar un proyecto. Camine y supervise a los estudiantes para asegurarse de que completen todos los pasos.
El programador debe completar los siguientes pasos:

- Abra el menú Archivo.
- Selecciona Abrir ejemplos.
- Seleccione y abra la plantilla de Autopilot.
- Nombra tu proyecto Velocity Remix.
- Guarda tu proyecto.
![]() Caja de herramientas para maestros
-
Comportamientos
Caja de herramientas para maestros
-
Comportamientos
Como se mencionó anteriormente, los comportamientos son una forma de hablar sobre las
acciones del robot. Una forma de hacer que los estudiantes piensen en los
comportamientos y organicen las acciones en una secuencia, es hacer que los estudiantes
etiqueten diferentes partes de su proyecto usando el bloque [comentario]. Los
estudiantes pueden etiquetar los diferentes comportamientos de los desafíos a lo largo
del proyecto. Para obtener más información sobre el uso del bloque [comment],
utilice la Ayuda.
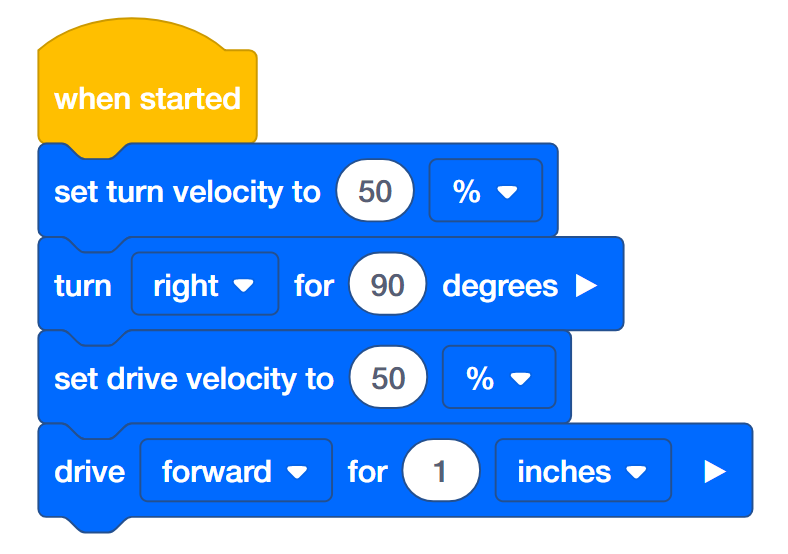
In the Tag You 're It! desafío,
se les pide a los estudiantes que programen el piloto automático para que gire
rápidamente para evitar ser etiquetados, conduzcan lentamente para etiquetar a alguien y
luego giren rápidamente de nuevo para huir. Vea el siguiente ejemplo de uso
del bloque de comentarios para describir la secuencia de
comportamientos:

También puede pedir a los estudiantes que expliquen cómo planificarán estos desafíos en términos de cómo quieren y esperan que se comporte el robot.
¡Etiqueta You 're It!
¡Gire rápidamente, conduzca lentamente, gire rápidamente para jugar un juego de etiqueta!
-
El robot quiere jugar un juego de etiqueta, ¡eres tú! Programador, use los bloques [set turn velocity], [turn for], [set drive velocity] y [drive for] para programar el piloto automático para que gire rápidamente para evitar ser etiquetado, conduzca lentamente para etiquetar a alguien y luego gire rápidamente de nuevo para huir. El porcentaje de velocidad para girar debe ser al menos dos veces más alto que el porcentaje de velocidad para conducir. El proyecto a continuación está iniciado pero incompleto. Necesita más bloques y velocidades establecidas.
- Programador, guarde el proyecto Tag y descárguelo al cerebro.
- Operador, ejecute el proyecto Tag.
- ¿El robot gira rápidamente, conduce lentamente y luego gira rápidamente de nuevo?
- Grabadora, toma notas sobre el comportamiento del robot.
Desafío adicional: ¡Haz que el piloto automático reproduzca un sonido una vez que etiquete a alguien!
![]() Teacher Toolbox
-
Recordatorios y soluciones
Teacher Toolbox
-
Recordatorios y soluciones
-
Configure un objeto estacionario, como un libro que el robot etiquetará para imitar el etiquetado de una persona.
-
El docente puede limitar las distancias de conducción si el espacio es limitado.
-
Los estudiantes deben trabajar en sus grupos con sus roles individuales.
-
El constructor debe comprobar que el robot está preparado para ejecutar el proyecto.
-
El programador debe realizar los cambios según las indicaciones.
-
El operador debe ejecutar los proyectos en el robot.
-
El Registrador debe documentar su trabajo y resultados en sus cuadernos de ingeniería.
-
Haga que los estudiantes se registren cuando hayan completado esta actividad y muestren o ejecuten su (s) proyecto(s).
Para la solución a Tag You 're It!, haga clic en uno de los siguientes enlaces (Google Doc/.docx/.pdf).
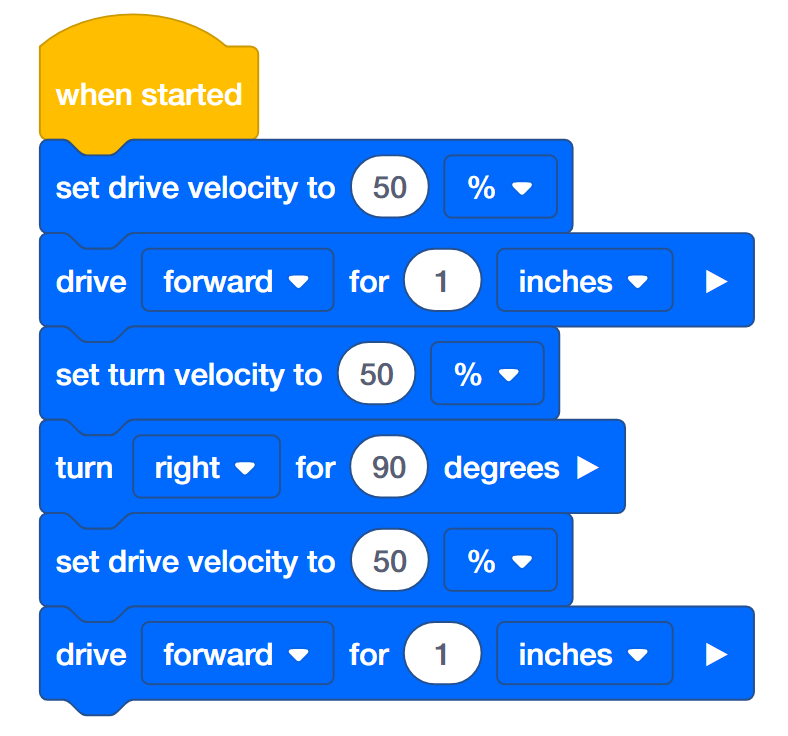
¡Protege el castillo!
¡Muévete en un cuadrado para proteger el castillo de los intrusos!
-
¡Tu rey te pidió que protegieras el castillo! ¡Debes conducir alrededor del castillo cuadrado para asegurarte de que esté a salvo de los intrusos! Programador, use la velocidad de giro establecida, gire para, establezca la velocidad de accionamiento y accione para que los bloques programen el piloto automático para que se mueva en un cuadrado. El piloto automático debe conducir rápidamente a lo largo de los lados de la plaza, pero girar lentamente en las esquinas. El proyecto a continuación está iniciado pero incompleto. Necesita más bloques y velocidades establecidas.
- Programador, guarde el proyecto Castle y descárguelo al cerebro.
- Operador, ejecute el proyecto Castle.
- ¿El robot se mueve rápidamente en forma cuadrada pero gira lentamente en las esquinas?
- Grabadora, toma notas sobre el comportamiento del robot.
Desafíos de bonificación:
- Haga que el LED táctil del piloto automático muestre un color diferente mientras conduce a cada lado del cuadrado.
- El perímetro del castillo cuadrado que necesita ser vigilado es de 20 pulgadas. Programa el robot para que se mueva por el perímetro.
- El área del castillo cuadrado que debe protegerse es de 49 pulgadas. Calcula la longitud de cada lado y muévete en un cuadrado que cubra el área.
![]() Teacher Toolbox
-
Recordatorios y soluciones
Teacher Toolbox
-
Recordatorios y soluciones
-
El docente puede limitar las distancias de conducción si el espacio es limitado.
-
Los estudiantes deben trabajar en sus grupos con sus roles individuales.
-
El constructor debe comprobar que el robot está preparado para ejecutar el proyecto.
-
El programador debe realizar los cambios según las indicaciones.
-
El operador debe ejecutar los proyectos en el robot.
-
El Registrador debe documentar su trabajo y resultados en sus cuadernos de ingeniería.
-
Haga que los estudiantes se registren cuando hayan completado esta actividad y muestren o ejecuten su (s) proyecto(s).
Para las soluciones para Proteger el Castillo!, haga clic en uno de los siguientes enlaces (Google Doc/.docx/.pdf).
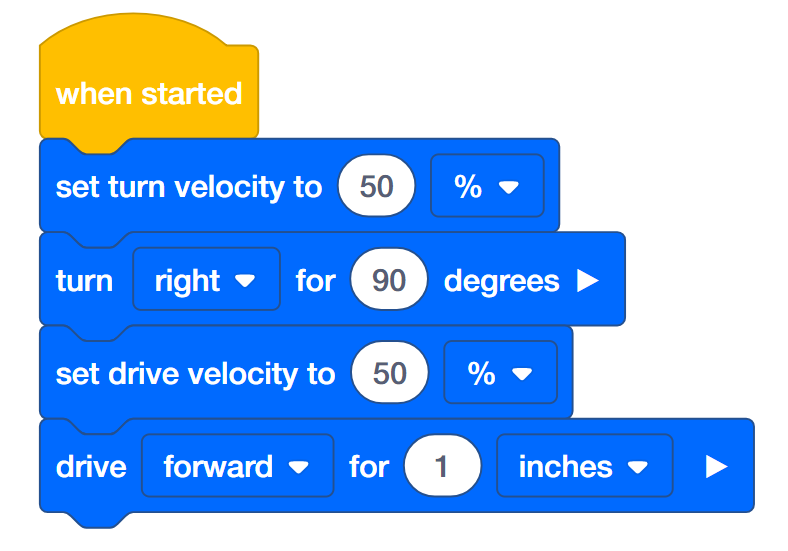
Camarero robot
¡No derrames las bebidas!
-
Tu robot se está entrenando para ser camarero en un nuevo restaurante de la ciudad. ¡Programa al camarero robot para que pueda moverse rápidamente sin derramar lo que lleva! Utilice el 6x Pitch Standoff para simular alimentos o bebidas que llevaría el camarero. Programador, use la velocidad de giro establecida, gire para, ajuste la velocidad de accionamiento y accione los bloques para programar el piloto automático para que gire 360 grados y conduzca 12 pulgadas lo más rápido posible mientras equilibra un 6x Pitch Standoff en el cerebro del piloto automático. El proyecto a continuación está iniciado pero incompleto. Necesita tener las velocidades y distancias establecidas.
-
Constructor, coloque un 6x Pitch Standoff del VEX IQ Kit a través de donde VEX IQ está escrito en el cerebro.

- Programador, ajuste las velocidades y distancias. A continuación, guarda el proyecto Robot Waiter y descárgalo en el cerebro.
- Operador, ejecute el proyecto Robot Waiter.
- ¿El robot gira y conduce mientras mantiene el haz en la parte superior del cerebro? ¿Qué tan rápido puede moverse el robot antes de que la viga se deslice?
- Programador, pruebe velocidades cada vez más rápidas hasta que encuentre el límite. El límite de giro puede ser diferente al límite de conducción. Utilice la información de la grabadora para tomar decisiones sobre qué velocidad es la mejor opción.
- Graba, toma notas sobre el comportamiento del robot, su velocidad y si el haz se cae. Tome nota de cómo cambian las velocidades cada vez que se prueba el proyecto.
![]() Teacher Toolbox
- Diseño
iterativo
Teacher Toolbox
- Diseño
iterativo
Esta actividad se centra en pedir a los estudiantes que participen en un proceso de
diseño iterativo. Se pide a los estudiantes que prueben sus proyectos antes de realizar
cambios. Anime a los estudiantes a diseñar, probar, hacer cambios basados en la
retroalimentación y probar de nuevo. Los ajustes a la velocidad deben basarse en los
resultados de las pruebas y/o los comentarios de los otros miembros del grupo. Anime a
los estudiantes a seguir el proceso de diseño iterativo en lugar de simplemente adivinar
y verificar para llegar a una conclusión sobre qué velocidad es la mejor. La mejor
velocidad asegurará que el camarero robot no derrame nada.
El diseño iterativo es una metodología de diseño importante en robótica, así como en
otros procesos de diseño de ingeniería.
Los estudiantes también practicarán el razonamiento abstracto mientras deciden cómo ajustar la velocidad para concluir cuál es la mejor.
![]() Teacher Toolbox
-
Recordatorios y soluciones
Teacher Toolbox
-
Recordatorios y soluciones
- El docente puede limitar las distancias de conducción si el espacio es limitado.
- Los estudiantes deben trabajar en sus grupos con sus roles individuales.
-
El constructor debe verificar que el robot esté preparado para ejecutar el proyecto y que el 6x Pitch Standoff esté correctamente posicionado sobre la calcomanía VEX IQ en el cerebro antes de cada prueba de velocidad.

- El programador debe realizar los cambios según las indicaciones.
- El operador debe ejecutar los proyectos en el robot.
- El Registrador debe documentar su trabajo y resultados en sus cuadernos de ingeniería.
-
Haga que los estudiantes se registren cuando hayan completado esta actividad y muestren o
ejecuten su (s) proyecto(s).
Para la solución a Robot Waiter, haga clic
en uno de los siguientes enlaces (Google
Doc/.docx/.pdf)