
![]() Opettajan vinkkejä
Opettajan vinkkejä
Opiskelijat voivat viitata opetusohjelmiin, jos heillä on ongelmia projektin luomisessa, uudelleennimeämisessä tai tallentamisessa. Kävele ja tarkkaile oppilaita varmistaaksesi, että he suorittavat kaikki vaiheet.
Ohjelmoijan tulee suorittaa seuraavat vaiheet:

-
Avaa Tiedosto -valikko.
-
Valitse Avaa Esimerkit.
-
Valitse ja avaa Autopilot Template.
-
Nimeä projektisi Velocity Remix.
-
Tallenna projektisi.
![]() Opettajan työkalupakki
-
Käyttäytyminen
Opettajan työkalupakki
-
Käyttäytyminen
Kuten aiemmin mainittiin, käyttäytyminen on tapa puhua robotin toimista. Yksi tapa saada oppilaat ajattelemaan käyttäytymistä ja toimintojen järjestämistä peräkkäin on saada opiskelijat merkitsemään projektinsa eri osat [kommentti] -lohkolla. Opiskelijat voivat merkitä haasteista erilaisia käyttäytymismalleja koko projektin ajan. Jos haluat lisätietoja [kommentti] -lohkon käytöstä, käytä Ohje.
Tagissa olet se! haasteessa oppilaita pyydetään ohjelmoimaan Autopilot kääntymään nopeasti välttääkseen merkitsemisen, ajamaan hitaasti merkitäkseen jonkun ja kääntymään sitten nopeasti uudelleen pakenemaan. Katso alla oleva esimerkki kommentti -lohkon käyttämisestä käyttäytymisjärjestyksen kuvaamiseen:

Voit myös pyytää oppilaita selittämään, kuinka he suunnittelevat näitä haasteita sen suhteen, miten he haluavat ja odottavat robotin käyttäytyvän.
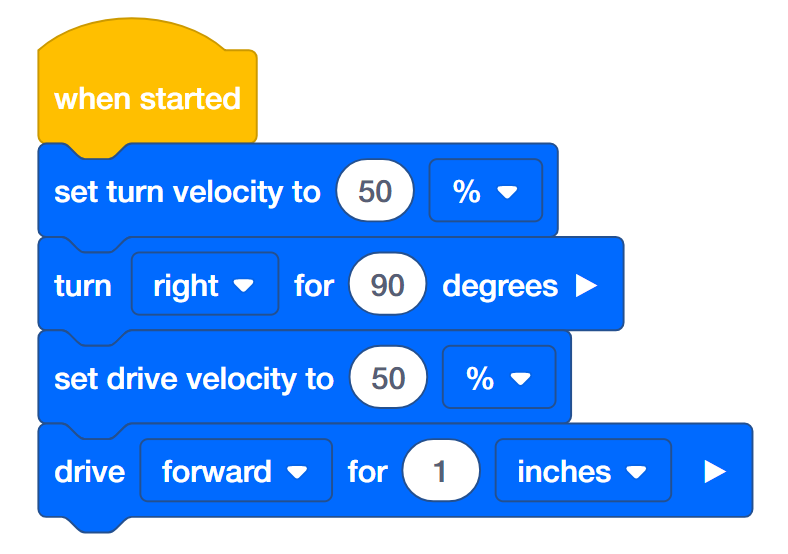
Merkitse sinä olet se!
Käänny nopeasti, aja hitaasti, käänny nopeasti pelataksesi merkkipeliä!
-
Robotti haluaa pelata merkkipeliä – olet siinä! Ohjelmoija, käytä [set turn speed], [turn for], [set drive speed] ja [drive for] -lohkoja ohjelmoimaan Autopilotin kääntymään nopeasti välttääksesi merkitsemisen, aja hitaasti merkitäksesi jonkun ja käännä sitten nopeasti uudelleen paeta! Käännösnopeusprosentin tulee olla vähintään kaksi kertaa niin korkea kuin ajon nopeusprosentti. Alla oleva projekti on aloitettu, mutta keskeneräinen. Se tarvitsee lisää lohkoja ja asetettuja nopeuksia.
-
Ohjelmoija, tallenna Tag -projekti ja lataa se aivoihin.
-
Käyttäjä, suorita Tag projekti.
-
Kääntyykö robotti nopeasti, ajaako hitaasti ja kääntyykö sitten taas nopeasti?
-
Tallennin, tee muistiinpanoja robotin käyttäytymisestä.
Bonushaaste: Anna Autopilotin soittaa ääni, kun se merkitsee jonkun!
![]() Opettajan työkalupakki
-
Muistutukset ja ratkaisut
Opettajan työkalupakki
-
Muistutukset ja ratkaisut
-
Aseta paikallaan oleva esine, kuten kirja, jonka robotti merkitsee jäljittelemään henkilön merkitsemistä.
-
Opettaja voi rajoittaa ajomatkoja, jos tilaa on rajoitetusti.
-
Opiskelijoiden tulee työskennellä ryhmissään yksilöllisten rooliensa kanssa.
-
Rakentajan tulee tarkistaa, että robotti on valmis suorittamaan projektia.
-
Ohjelmoijan tulee tehdä muutokset ohjeiden mukaisesti.
-
Operaattorin tulee suorittaa projekteja robotilla.
-
Tallentimen tulee dokumentoida työnsä ja tulokset tekniseen muistikirjaansa.
-
Pyydä oppilaita kirjautumaan sisään, kun he ovat suorittaneet tämän tehtävän, ja joko näyttämään tai suorittamaan projektinsa.
Jos haluat ratkaisun Tag You're It! -ongelmaan, napsauta jotakin seuraavista linkeistä (Google Doc/.docx/.pdf).
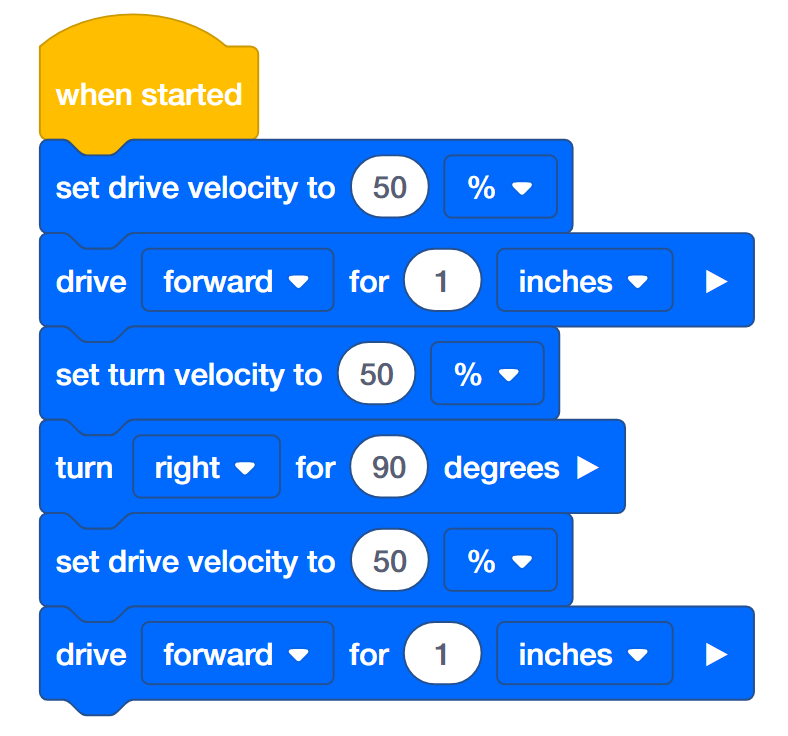
Suojele linnaa!
Suojaa linnaa tunkeilijoilta liikkumalla aukiolla!
-
Kuninkasi pyysi sinua suojelemaan linnaa! Sinun täytyy ajaa neliön linnan ympäri varmistaaksesi, että se on turvassa tunkeilijoilta! Ohjelmoija, käytä asetettua kierrosnopeutta, kierrosta, asetettua ajonopeutta ja vetoa lohkolle ohjelmoimaan Autopilotin liikkumaan neliössä. Autopilotin tulee ajaa nopeasti aukion reunoja pitkin, mutta kääntyä hitaasti kulmissa. Alla oleva projekti on aloitettu, mutta keskeneräinen. Se tarvitsee lisää lohkoja ja asetettuja nopeuksia.
-
Ohjelmoija, tallenna linnaprojekti ja lataa se aivoihin.
-
Operaattori, ajaa linnaprojektia.
-
Liikkuuko robotti nopeasti neliön muodossa, mutta kääntyykö hitaasti kulmista?
-
Tallennin, tee muistiinpanoja robotin käyttäytymisestä.
Bonushaasteet:
-
Anna Autopilotin kosketusnäytön LED-näytössä eri väriä, kun se ajaa neliön molemmilla puolilla.
-
Vartioitavan neliön linnan ympärysmitta on 20 tuumaa. Ohjelmoi robotti liikkumaan kehän ympäri.
-
Neliön linnan vartioitava alue on 49 tuumaa. Laske kummankin sivun pituus ja siirry neliöön, joka peittää alueen.
![]() Opettajan työkalupakki
-
Muistutukset ja ratkaisut
Opettajan työkalupakki
-
Muistutukset ja ratkaisut
-
Opettaja voi rajoittaa ajomatkoja, jos tilaa on rajoitetusti.
-
Opiskelijoiden tulee työskennellä ryhmissään yksilöllisten rooliensa kanssa.
-
Rakentajan tulee tarkistaa, että robotti on valmis suorittamaan projektia.
-
Ohjelmoijan tulee tehdä muutokset ohjeiden mukaisesti.
-
Operaattorin tulee suorittaa projekteja robotilla.
-
Tallentimen tulee dokumentoida työnsä ja tulokset tekniseen muistikirjaansa.
-
Pyydä oppilaita kirjautumaan sisään, kun he ovat suorittaneet tämän tehtävän, ja joko näyttämään tai suorittamaan projektinsa.
Ratkaisuja Suojaa linnaa! saat napsauttamalla jotakin seuraavista linkeistä (Google Doc/.docx/.pdf).
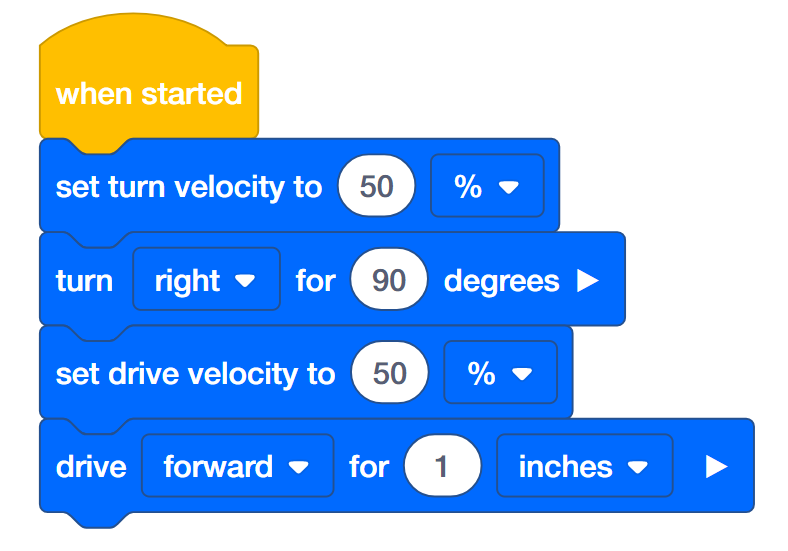
Robotti tarjoilija
Älä läikytä juomia!
-
Robottisi harjoittelee tarjoilijaksi kaupungin uudessa ravintolassa. Ohjelmoi robottitarjoaja liikkumaan nopeasti ilman, että se läikytä kantamaansa! Käytä 6x Pitch Standoffia simuloidaksesi ruokaa tai juomaa, jota tarjoilija kantaisi. Ohjelmoija, käytä asetettua pyörimisnopeutta, kierrosta, asetettua ajonopeutta ja vetoa lohkoa ohjelmoimaan Autopilotin kääntymään 360 astetta ja ajamaan 12 tuumaa mahdollisimman nopeasti samalla kun tasapainotat 6x Pitch Standoffin Autopilotin aivoissa . Alla oleva projekti on aloitettu, mutta keskeneräinen. Siinä on oltava nopeudet ja etäisyydet asetettuna.
-
Builder, aseta 6x Pitch Standoff VEX IQ Kitistä sen kohdalle, jossa VEX IQ on kirjoitettu aivoihin.

-
Ohjelmoija, aseta nopeudet ja etäisyydet. Tallenna sitten Robot Waiter -projekti ja lataa se aivoihin.
-
Operaattori, aja Robot Waiter -projekti.
-
Kääntyykö ja ajaako robotti pitäen säteen aivojen päällä? Kuinka nopeasti robotti voi liikkua ennen kuin säde liukuu pois?
-
Ohjelmoija, testaa yhä nopeampia nopeuksia, kunnes löydät rajan. Kääntymisen raja voi olla erilainen kuin ajon raja. Käytä tallentimen tietoja tehdäksesi päätöksiä siitä, mikä nopeus on paras valinta.
-
Tallennin, tee muistiinpanoja robotin käyttäytymisestä, sen nopeudesta ja siitä, putoaako säde. Pane merkille, kuinka nopeudet muuttuvat joka kerta, kun projektia testataan.
![]() Opettajan työkalupakki
-
Iteratiivinen suunnittelu
Opettajan työkalupakki
-
Iteratiivinen suunnittelu
Tämä toiminta keskittyy pyytämään opiskelijoita osallistumaan iteratiiviseen suunnitteluprosessiin. Opiskelijoita pyydetään testaamaan projektejaan ennen muutosten tekemistä. Kannusta oppilaita suunnittelemaan, testaamaan, tekemään muutoksia palautteen perusteella ja testaamaan uudelleen. Nopeuden säätöjen tulee perustua testien tuloksiin ja/tai muilta ryhmän jäseniltä saatuun palautteeseen. Kannusta oppilaita seuraamaan iteratiivista suunnitteluprosessia sen sijaan, että he vain arvaisivat ja tarkistaisivat tehdäkseen johtopäätöksen siitä, mikä nopeus on paras. Paras nopeus varmistaa, että robottitarjoilija ei läikytä mitään.
Iteratiivinen suunnittelu on tärkeä suunnittelumetodologia robotiikassa sekä muissa suunnitteluprosesseissa.
Opiskelijat myös harjoittelevat abstraktia päättelyä ja päättävät, kuinka nopeutta säädetään parhaan vaihtoehdon päättämiseksi.
![]() Opettajan työkalupakki
-
Muistutukset ja ratkaisut
Opettajan työkalupakki
-
Muistutukset ja ratkaisut
-
Opettaja voi rajoittaa ajomatkoja, jos tilaa on rajoitetusti.
-
Opiskelijoiden tulee työskennellä ryhmissään yksilöllisten rooliensa kanssa.
-
Rakentajan tulee tarkistaa, että robotti on valmis suorittamaan projektia ja että 6x Pitch Standoff on oikein sijoitettu aivoissa olevan VEX IQ -tarran päälle ennen jokaista nopeustestiä.

-
Ohjelmoijan tulee tehdä muutokset ohjeiden mukaisesti.
-
Operaattorin tulee suorittaa projekteja robotilla.
-
Tallentimen tulee dokumentoida työnsä ja tulokset tekniseen muistikirjaansa.
-
Pyydä oppilaita kirjautumaan sisään, kun he ovat suorittaneet tämän tehtävän, ja joko näyttämään tai suorittamaan projektinsa.
Jos haluat ratkaisun Robot Waiteriin, napsauta jotakin seuraavista linkeistä (Google Doc/.docx/.pdf)