
खेल
भाग 1 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे लैब 1 में सीखी गई बातों पर काम करेंगे, ताकि कोड बेस मंगल ग्रह की चट्टान का नमूना (लाल डिस्क) एकत्र करके वापस ला सके। लेकिन अब, वे अपने रोबोट को आई सेंसर डेटा का उपयोग करके डिस्क को उसके रंग के आधार पर छांटने के लिए कोड करेंगे।
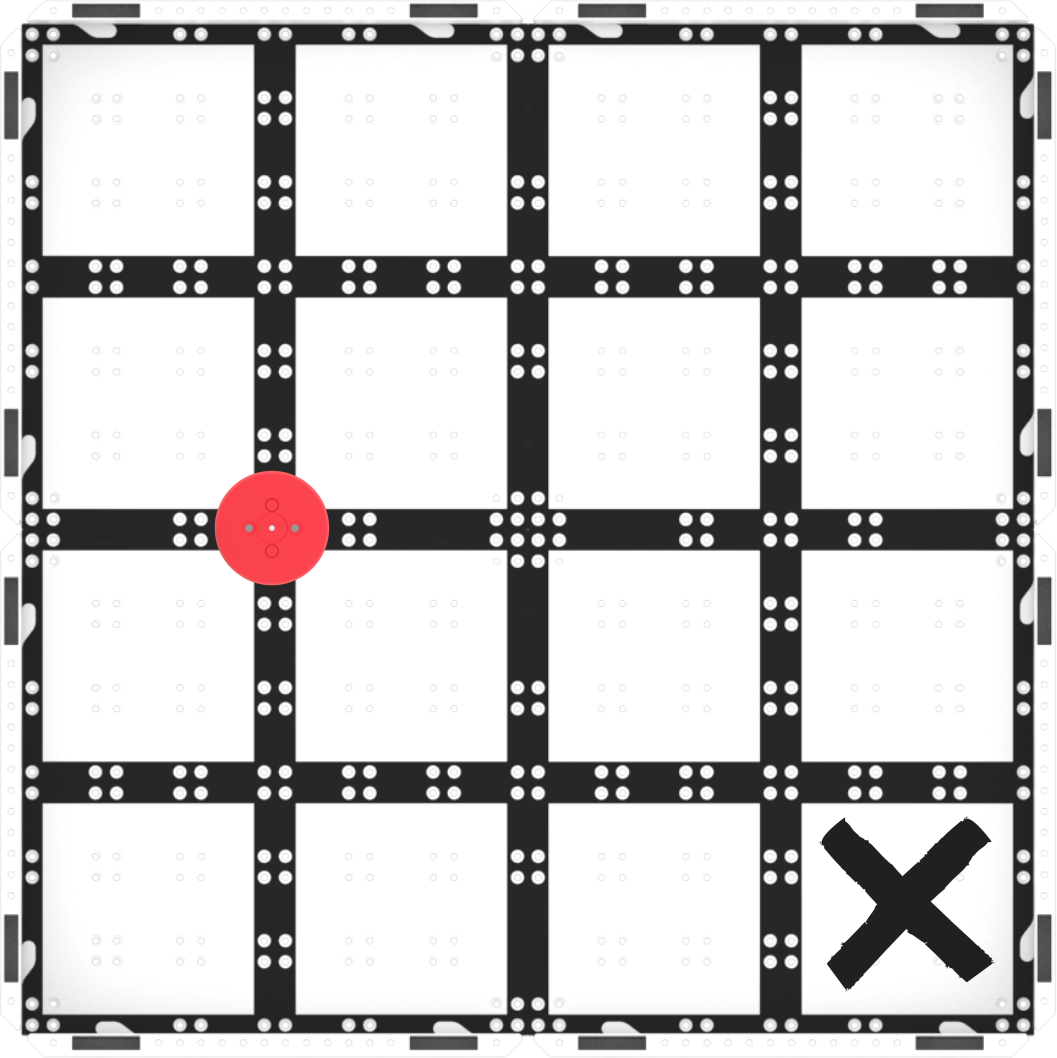
- छात्रों को X से चिह्नित छंटाई क्षेत्र के साथ फ़ील्ड सेटअप दिखाएं। एक बार जब कोड बेस लाल डिस्क एकत्र कर लेता है, तो उसे X के साथ वर्ग में छोड़ना होगा।
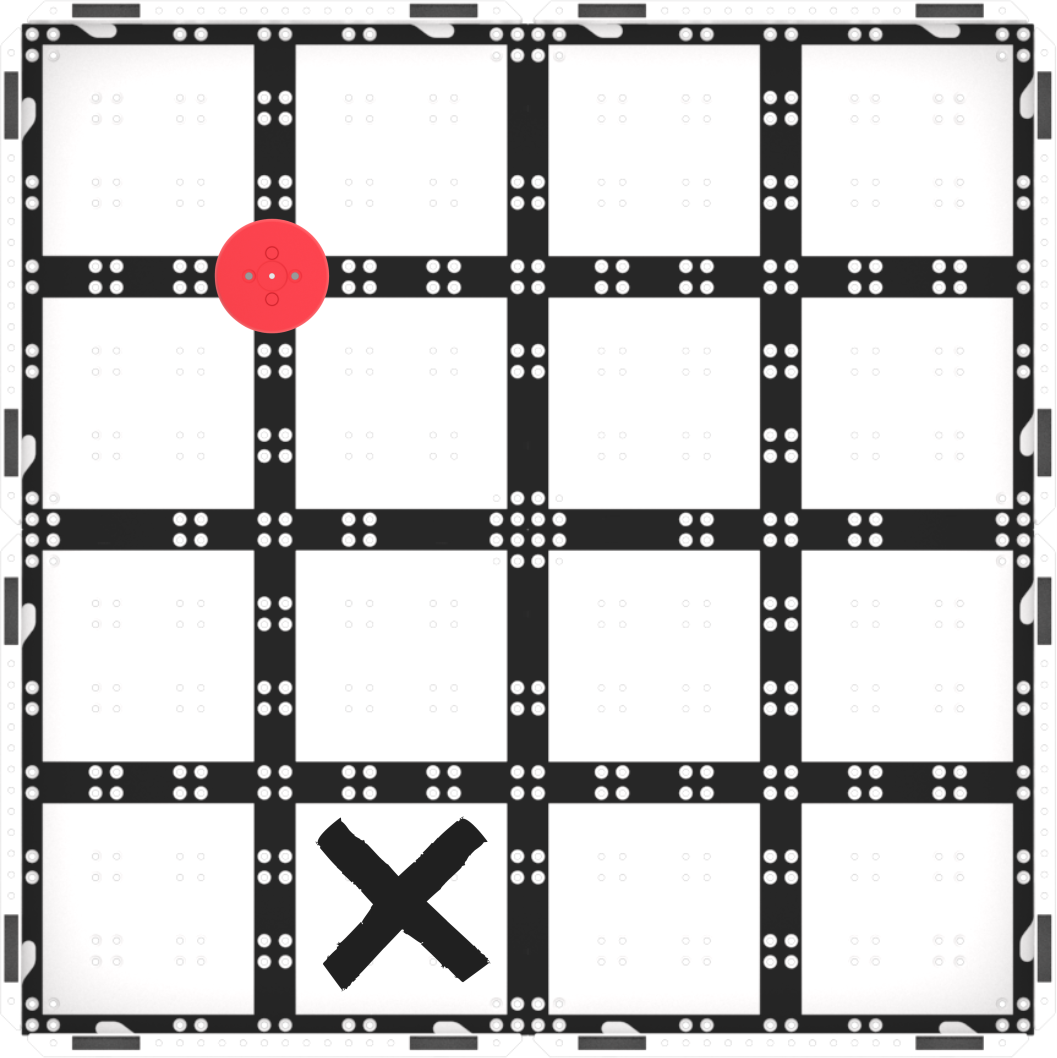
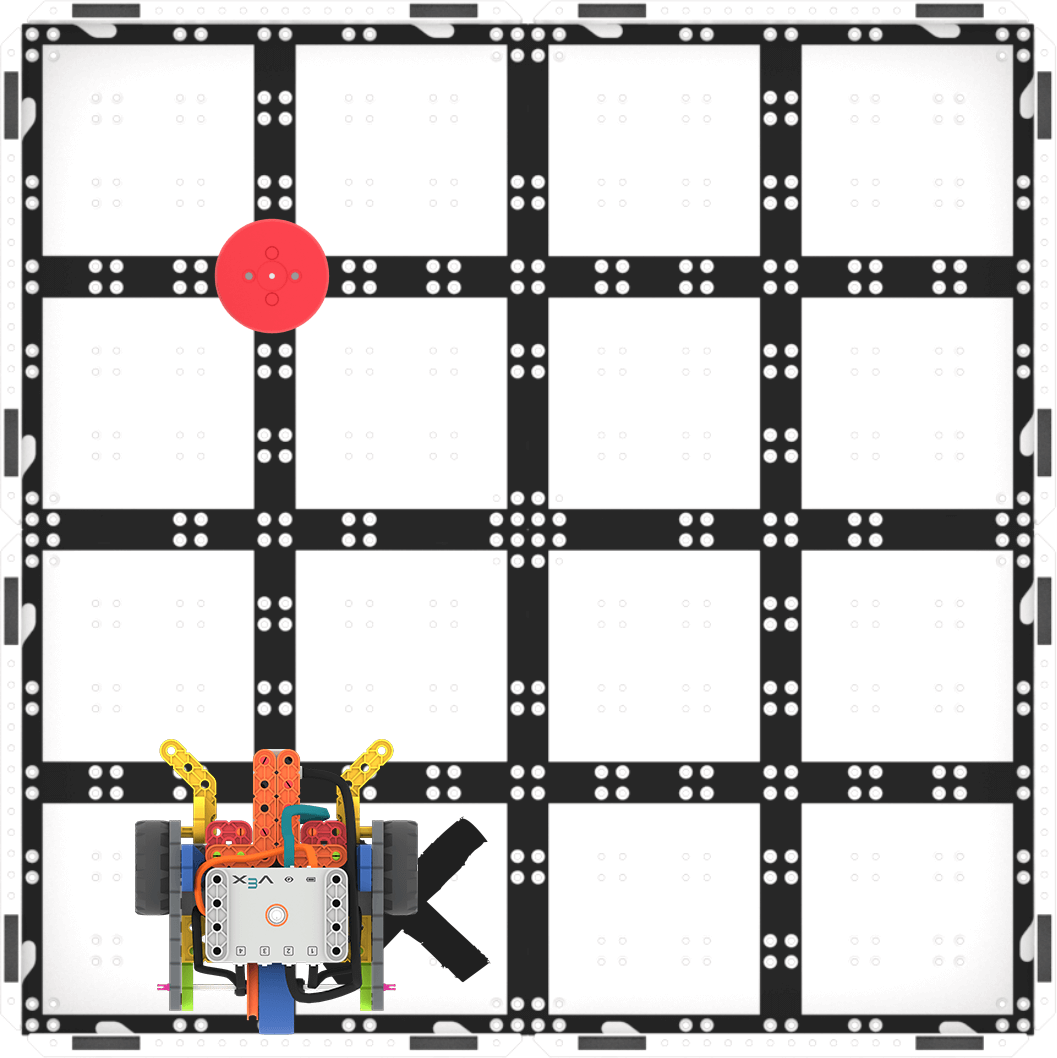
फ़ील्ड सेटअप - छात्र आपके साथ मिलकर एक परियोजना बनाएंगे और फिर उसका परीक्षण मंगल की सतह (क्षेत्र) पर करेंगे। नीचे दिया गया एनीमेशन यह दर्शाता है कि इस परियोजना के शुरू होने पर कोड बेस किस प्रकार आगे बढ़ेगा। रोबोट पहले लाल डिस्क तक पहुंचने तक आगे बढ़ता है और फिर उसे उठाने के लिए अपने विद्युत चुम्बक को शक्ति प्रदान करता है। इसके बाद, रोबोट घूमकर अपनी प्रारंभिक स्थिति में वापस आ जाता है, फिर 90 डिग्री बाईं ओर मुड़कर आगे की ओर चला जाता है और X से चिह्नित छंटाई क्षेत्र तक पहुंच जाता है। X पर पहुंचने के बाद, रोबोट डिस्क को छोड़ देता है और फिर घूमकर अपनी प्रारंभिक स्थिति में वापस आ जाता है।
वीडियो फाइल - मॉडलछात्रों के लिए मॉडल कि कैसे VEXcode GO में प्रोजेक्ट बनाएं और फील्ड पर अपने प्रोजेक्ट का परीक्षण करें।
- छात्रों को यह दिखाकर शुरुआत करें कि वे अपने कोड बेस पर स्थित ब्रेन को VEXcode GO में अपने डिवाइस से कैसे कनेक्ट करें। क्योंकि कनेक्शन चरण डिवाइसों के बीच भिन्न होते हैं, VEX GO ब्रेन को अपने कंप्यूटर या टैबलेट से कनेक्ट करने के लिए विशिष्ट चरणों के लिए VEXcode GO VEX लाइब्रेरी के कनेक्टिंग लेख देखें।
- उन्हें कोड बेस के लिए VEXCode GO को भी कॉन्फ़िगर करना होगा। यदि आवश्यक हो, कोड बेस VEX लाइब्रेरी को कॉन्फ़िगर करने संबंधी लेख से चरणों का मॉडल बनाऊंगा और सुनिश्चित करूंगा कि विद्यार्थी टूलबॉक्स में ड्राइवट्रेन ब्लॉक देख सकें।
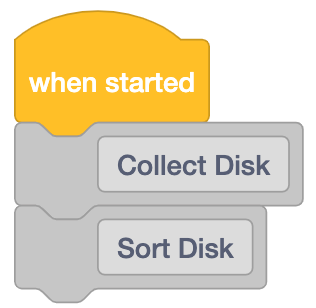
- एक बार कोड बेस कॉन्फ़िगर हो जाने के बाद, छात्रों को अपनी परियोजनाओं की योजना बनाने और व्यवस्थित करने के लिए निम्नलिखित [टिप्पणी] ब्लॉक जोड़ने को कहें। “डिस्क एकत्रित करें” [टिप्पणी] ब्लॉक के अंतर्गत ब्लॉक कोड बेस को डिस्क एकत्रित करने और मंगल बेस पर वापस लौटने के लिए प्रेरित करेंगे। “सॉर्ट डिस्क” [टिप्पणी] ब्लॉक के अंतर्गत ब्लॉक में डिस्क को निर्दिष्ट सॉर्टिंग क्षेत्र में पहुंचाने के लिए कोड बेस आई सेंसर डेटा का उपयोग करेगा - डिस्क रंग के आधार पर।
[टिप्पणी] ब्लॉक के साथ परियोजना की योजना बनाएं - फिर, छात्रों को लाल डिस्क एकत्र करने के लिए कोड बेस ड्राइव प्राप्त करने के लिए “डिस्क एकत्र करें” [टिप्पणी] ब्लॉक के अंतर्गत निम्नलिखित ब्लॉक जोड़ने को कहें।
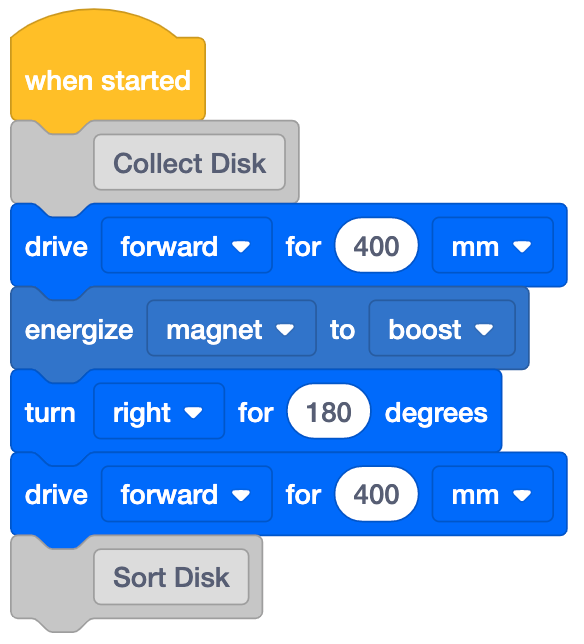
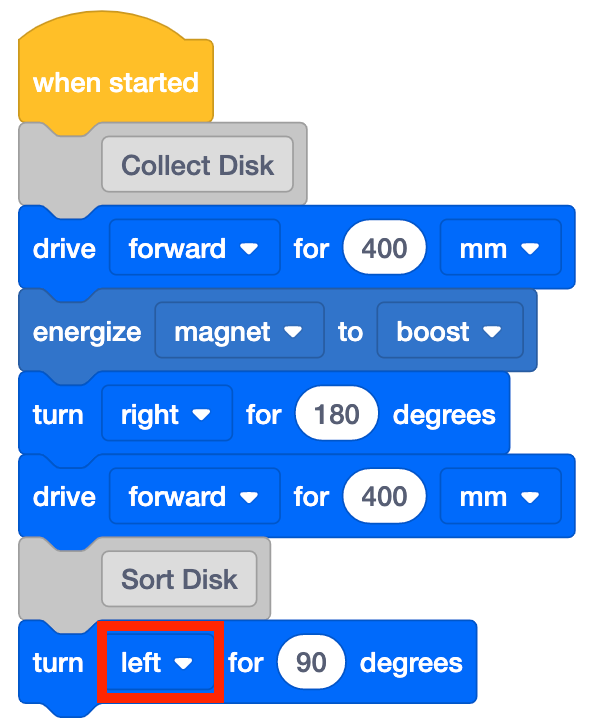
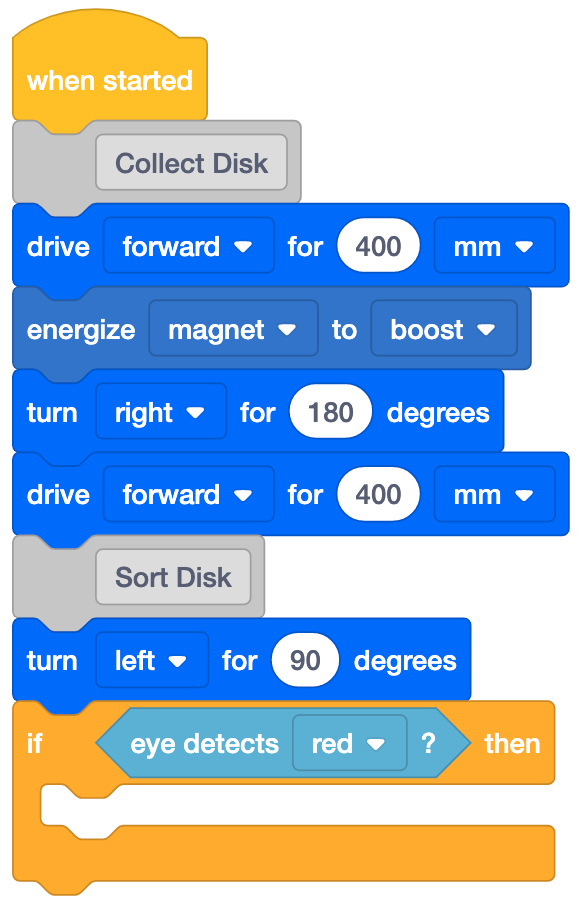
डिस्क कोड एकत्रित करें- इसके बाद, कोड बेस को डिस्क सॉर्ट करने के लिए प्रोजेक्ट में एक साथ जोड़ें। [Turn for] ब्लॉक को कार्यक्षेत्र में खींचें और इसे “Sort Disk” [Comment] ब्लॉक के नीचे संलग्न करें। कोड बेस को सॉर्टिंग क्षेत्र की ओर मोड़ने के लिए पैरामीटर को 'बाएं' में बदलें।
[के लिए मुड़ें] जोड़ें और बाईं ओर सेट करें - एक [यदि तो] ब्लॉक जोड़ें, और षट्भुज में एक <Detects color> ब्लॉक रखें। <Detects color> ब्लॉक को लाल पर सेट छोड़ दें। इससे कोड बेस डिस्क के रंग का पता लगाने के लिए आई सेंसर का उपयोग करेगा। यदि यह डिस्क लाल है, तो <Detects color> ब्लॉक सत्य रिपोर्ट करेगा, और 'सी' ब्लॉक के अंदर जोड़े गए ब्लॉक चलेंगे।
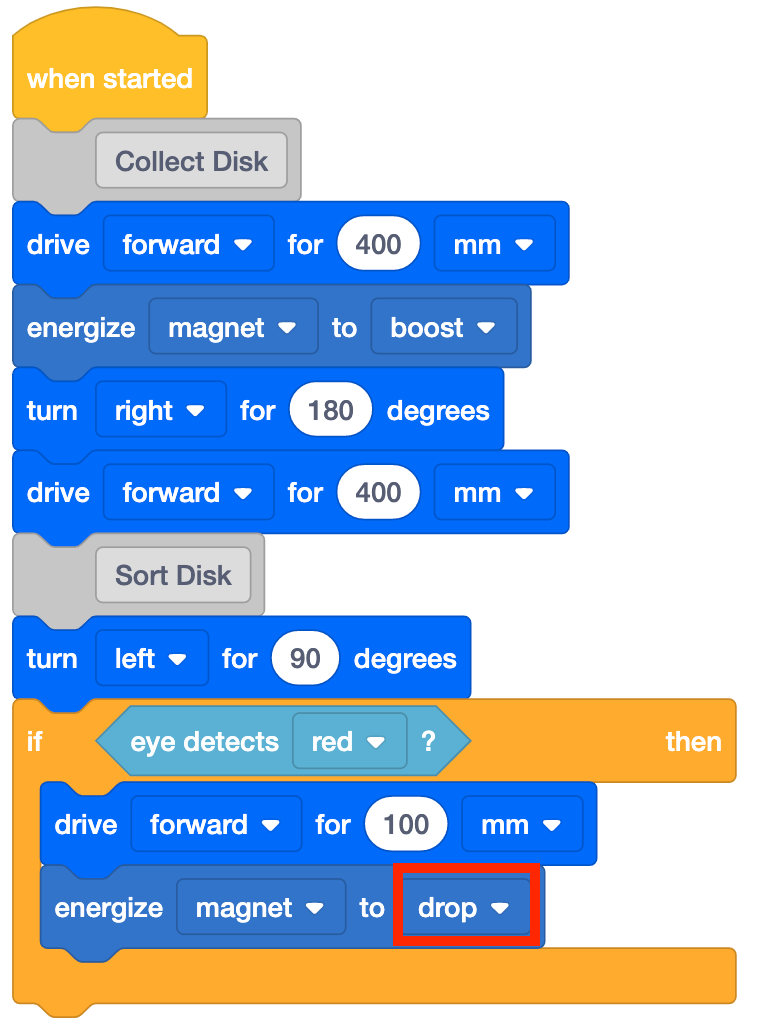
[यदि तो] को <Detects color> से जोड़ें- [यदि तो] ब्लॉक के अंदर एक [ड्राइव के लिए] और एक [एनर्जाइज़ इलेक्ट्रोमैग्नेट] जोड़ें और [एनर्जाइज़ इलेक्ट्रोमैग्नेट] को 'ड्रॉप' पर सेट करें। इससे कोड बेस ड्राइव को सॉर्टिंग क्षेत्र में ले जाया जाएगा और डिस्क को छोड़ दिया जाएगा।
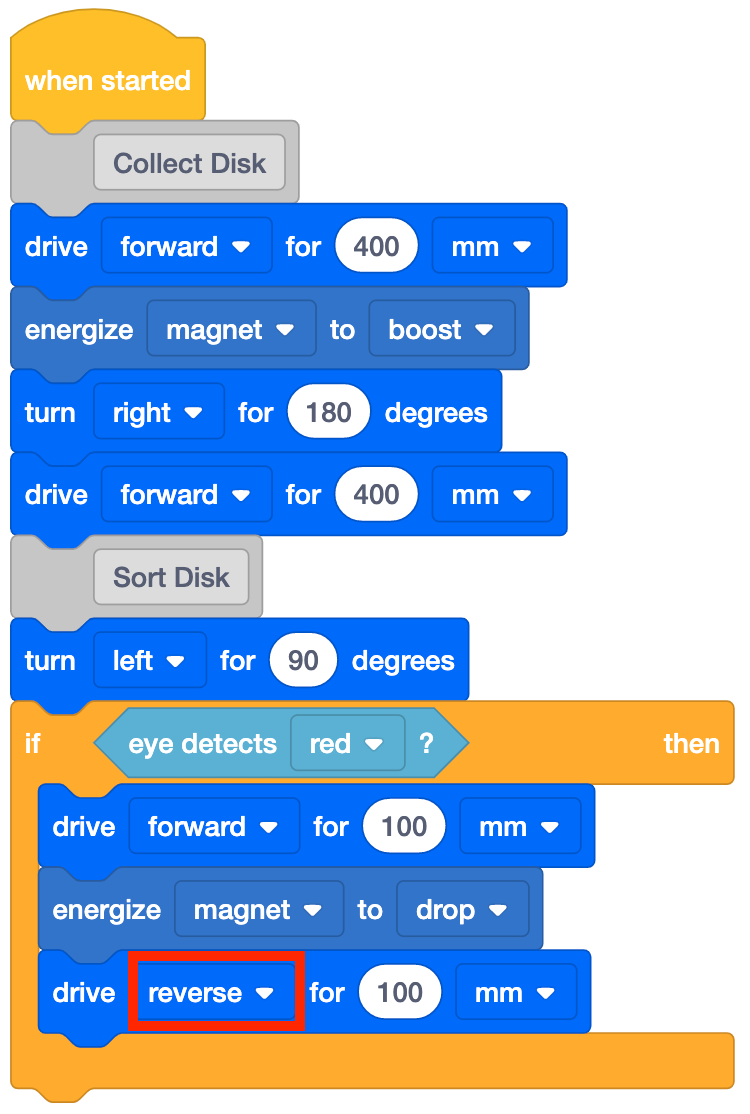
[ड्राइव फॉर} और [एनर्जाइज़ इलेक्ट्रोमैग्नेट] को 'ड्रॉप' पर सेट करें - [ड्राइव फॉर] ब्लॉक जोड़ें और इसे रिवर्स पर सेट करें। इससे डिस्क को छोड़ने के बाद कोड बेस मंगल बेस पर वापस आ जाएगा।
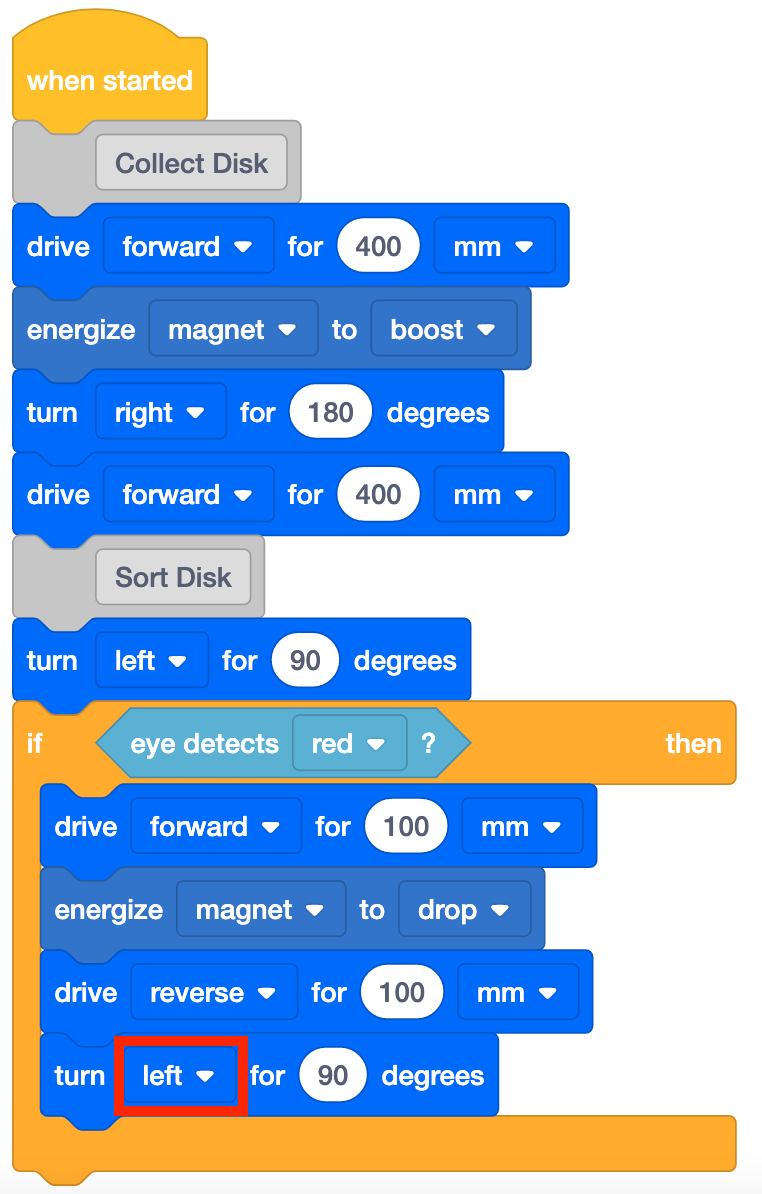
[ड्राइव के लिए] जोड़ें और रिवर्स पर सेट करें - अंत में, एक [टर्न फॉर] ब्लॉक जोड़ें, और इसे 'बाएं' पर सेट करें ताकि कोड बेस प्रारंभिक स्थिति में वापस आ जाए - मंगल ग्रह की सतह के संग्रह क्षेत्र का सामना करना।
[ड्राइव के लिए] जोड़ें और रिवर्स पर सेट करें - छात्रों को अपने प्रोजेक्ट का नाम सॉर्ट रेड 1 रखने को कहें और उसे अपने डिवाइस में सेव कर लें। VEXcode GO प्रोजेक्ट को सहेजने के लिए डिवाइस-विशिष्ट चरणों के लिए VEXcode GO VEX लाइब्रेरी के खोलें और सहेजें अनुभाग देखें.
विद्यार्थियों को यह मॉडल दिखाएं कि वे अपने प्रोजेक्ट का परीक्षण मैदान पर कैसे करें।
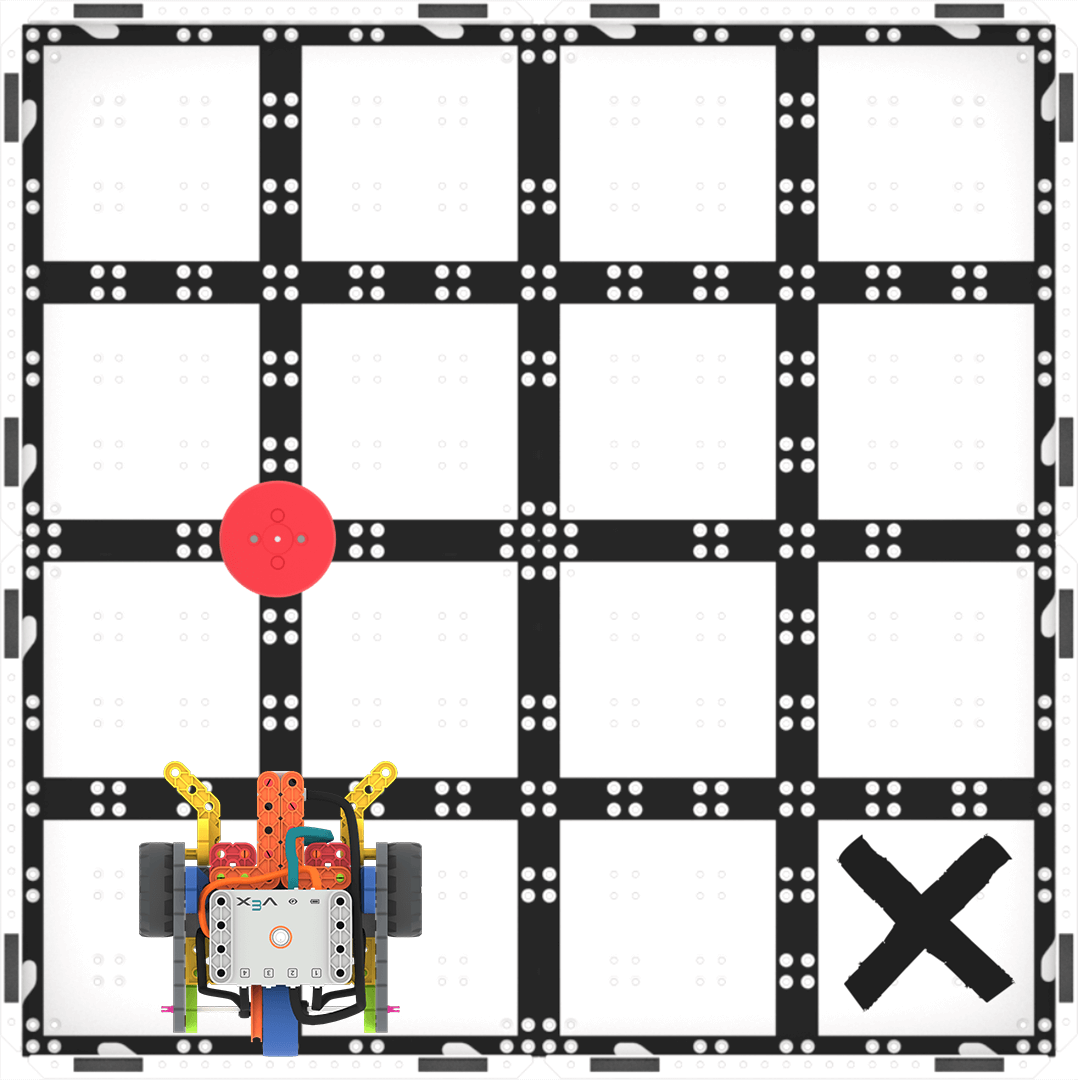
- सबसे पहले, उन्हें दिखाएं कि कैसे अपने रोबोट को प्रारंभिक बिंदु (मंगल बेस) और मैदान पर लाल डिस्क को रखना है, जैसा कि नीचे दी गई छवि में दिखाया गया है। संरेखण में सहायता के लिए फ़ील्ड पर ग्रिडलाइन का उपयोग करें। डिस्क और इलेक्ट्रोमैग्नेट दोनों को फील्ड की ग्रिडलाइनों पर पंक्तिबद्ध किया जा सकता है, जिससे छात्रों को अपने प्रोजेक्ट का परीक्षण करते समय सफलता प्राप्त करने में आसानी होगी।
परीक्षण के लिए सेटअप - एक बार कोड बेस स्थापित हो जाने पर, प्रोजेक्ट का परीक्षण करने के लिए VEXcode GO में 'प्रारंभ' का चयन करें। देखें कि कोड बेस लाल डिस्क को एकत्रित करने के लिए कैसे ड्राइव करता है, बेस पर वापस आता है, फिर उसे सॉर्टिंग क्षेत्र में पहुंचाता है।
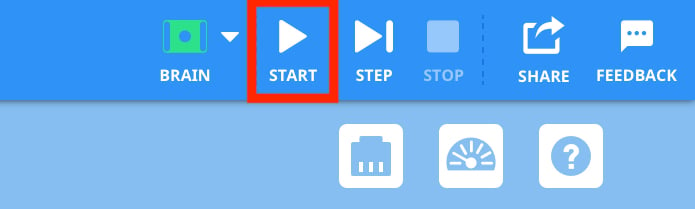
प्रोजेक्ट का परीक्षण करने के लिए 'प्रारंभ' चुनें - छात्रों को प्रोजेक्ट को रोकने के लिए VEXcode GO टूलबार में 'स्टॉप' बटन का चयन करना होगा।
- जो छात्र जल्दी समाप्त कर लेते हैं और उन्हें अतिरिक्त चुनौतियों की आवश्यकता होती है, उन्हें लाल डिस्क को किसी अन्य स्थान पर ले जाने को कहें। क्या वे अपने कोड को इस प्रकार समायोजित कर सकते हैं कि कोड बेस डिस्क को एकत्रित कर सके और उसे उसी सॉर्टिंग क्षेत्र में पहुंचा सके?
- सुविधा प्रदान करनाछात्रों के साथ बातचीत को सुविधाजनक बनाना जब वे अपनी परियोजनाओं का परीक्षण कर रहे हों।
- कोड बेस को कैसे पता चलता है कि इलेक्ट्रोमैग्नेट को कब सक्रिय करना है?
- कोड बेस को डिस्क का रंग पता लगाने के लिए कौन से ब्लॉक का उपयोग किया जाता है?
- यदि कोड बेस लाल रंग का पता नहीं लगा पाया तो क्या होगा?
अवधारणा पर ध्यान केंद्रित करें, परिशुद्धता पर नहीं। इस लैब का लक्ष्य किसी परियोजना में विद्युत-चुम्बक के उपयोग की अवधारणा पर ध्यान केंद्रित करना है। यदि विद्यार्थी अपने रोबोट को थोड़ा सा गलत दिशा में ले जाते हैं, या जब वे डिस्क की ओर बढ़ते हैं तो वह सही स्थान पर नहीं होती है, तो उन्हें बताएं कि डिस्क को थोड़ा सा हिलाना ठीक है, ताकि यह सुनिश्चित हो सके कि इलेक्ट्रोमैग्नेट उसे पकड़ ले।
- याद दिलाएंछात्रों को [ड्राइव फॉर] ब्लॉक में मापदंडों की जांच करने के लिए याद दिलाएं ताकि यह सुनिश्चित हो सके कि प्रोजेक्ट में डिस्क को इकट्ठा करने और फिर सॉर्ट करने के लिए आवश्यक सही दूरियां हैं।
- उन्हें यह भी जांचना चाहिए कि [टर्न फॉर] ब्लॉक में पैरामीटर्स को इस तरह से सेट किया गया है कि कोड बेस सही तरीके से घूमकर मंगल बेस और सॉर्टिंग क्षेत्र की ओर वापस आ सके।
विकास की मानसिकता को प्रोत्साहित करने और छात्रों को परीक्षण और त्रुटि को अपनाने में मदद करने के लिए, जो कोडिंग का एक हिस्सा है और गलतियों से सीखने में मदद करने के लिए, इस तरह के प्रश्न पूछें:
- आपने कौन सी गलती की है जिससे आपको कुछ सीख मिली है?
- प्रयोगशाला का कौन सा भाग कठिन है, या आपको कठिन सोचने पर मजबूर कर रहा है?
- पूछेंविद्यार्थियों से पूछें कि पर्सिवियरेंस रोवर किस प्रकार आई सेंसर का उपयोग कर जानकारी एकत्रित कर सकता है और विभिन्न मंगल ग्रह की चट्टानों और मिट्टी के नमूनों का अध्ययन कर सकता है। पर्सिवियरेंस रोवर आई सेंसर के साथ क्या अध्ययन कर सकता है?
खेल के बीच में ब्रेक & समूह चर्चा
जैसे ही प्रत्येक समूह कोड बेस को एकत्रित करने और छंटाई क्षेत्रमें लाल डिस्क वितरित करने के लिए अपनी परियोजना का परीक्षण किया है, एक संक्षिप्त बातचीत के लिए एक साथ आते हैं।
छात्रों की प्रगति की जांच करें और उनके प्रोजेक्ट में कोड बेस क्या कर रहा है, इस बारे में बात करें।
- हमारी परियोजना में नेत्र सेंसर कैसे काम करता है? नेत्र संवेदक को कौन सा ब्लॉक नियंत्रित करता है?
- आपने अपने प्रोजेक्ट में इलेक्ट्रोमैग्नेट को आई सेंसर के साथ कैसे काम करवाया?
- यदि हम डिस्क का स्थान बदल दें तो क्या होगा? क्या यह परियोजना अभी भी काम करेगी? क्यों या क्यों नहीं? आप कौन से पैरामीटर बदलेंगे?
भाग 2 - चरण दर चरण
- निर्देशछात्रों को निर्देश दें कि वे खेल भाग 1 में सीखी गई बातों को अपने प्रोजेक्ट पर लागू करेंगे, ताकि कोड बेस एक नए स्थान से लाल डिस्क एकत्र कर सके और उसे एक नए सॉर्टिंग क्षेत्र में छोड़ सके। कोड बेस द्वारा डिस्क को सफलतापूर्वक एकत्रित करने और क्रमबद्ध करने के लिए उन्हें अपनी परियोजनाओं में पैरामीटर बदलने की आवश्यकता होगी।
- छात्रों को नया फील्ड सेटअप दिखाएं और उन्हें ड्राइव दूरी प्रदान करें ताकि वे इस परियोजना के कोड पर ध्यान केंद्रित कर सकें। कोड बेस को डिस्क को एकत्रित करने के लिए 200 मिलीमीटर (~8 इंच) और नए छंटाई क्षेत्र में 350 मिलीमीटर (~14 इंच (इंच)) ड्राइव करने की आवश्यकता होगी।
भाग 2 फ़ील्ड सेटअप चलाएँ- निम्नलिखित एनीमेशन एक संभावित तरीका दिखाता है जिससे कोड बेस चुनौती को पूरा करने के लिए आगे बढ़ सकता है। रोबोट पहले लाल डिस्क तक पहुंचने तक आगे बढ़ता है और फिर उसे उठाने के लिए अपने विद्युत चुम्बक को शक्ति प्रदान करता है। इसके बाद, रोबोट घूमकर अपनी प्रारंभिक स्थिति में वापस आ जाता है, फिर 90 डिग्री बाईं ओर मुड़कर आगे की ओर चला जाता है और X से चिह्नित छंटाई क्षेत्र तक पहुंच जाता है। X पर पहुंचने के बाद, रोबोट डिस्क को छोड़ देता है और फिर घूमकर अपनी प्रारंभिक स्थिति में वापस आ जाता है।
वीडियो फाइल - मॉडलछात्रों के लिए मॉडल कि वे VEXcode GO में अपने प्रोजेक्ट कैसे शुरू करें।
- यदि आवश्यक हो, तो छात्रों को दिखाएं कि वे अपने कोड बेस पर स्थित ब्रेन को VEXcode GO में अपने डिवाइस से कैसे कनेक्ट करें। क्योंकि कनेक्शन चरण डिवाइसों के बीच भिन्न होते हैं, VEX GO ब्रेन को अपने कंप्यूटर या टैबलेट से कनेक्ट करने के लिए विशिष्ट चरणों के लिए VEXcode GO VEX लाइब्रेरी के कनेक्टिंग लेख देखें।
- यदि आवश्यक हो, कोड बेस VEX लाइब्रेरी को कॉन्फ़िगर करने संबंधी लेख से चरणों का मॉडल बनाऊंगा और सुनिश्चित करूंगा कि विद्यार्थी टूलबॉक्स में ड्राइवट्रेन ब्लॉक देख सकें।
- छात्रों को अपने प्रोजेक्ट का नाम सॉर्ट रेड 2 रखने को कहें और उसे अपने डिवाइस में सेव कर लें। VEXcode GO प्रोजेक्ट को सहेजने के लिए डिवाइस-विशिष्ट चरणों के लिए VEXcode GO VEX लाइब्रेरी का खोलें और सहेजें अनुभाग देखें।
यदि आवश्यक हो, तो विद्यार्थियों को यह मॉडल दिखाएं कि वे अपने प्रोजेक्ट का परीक्षण मैदान पर कैसे करें।
- उन्हें दिखाएं कि कोड बेस को मंगल बेस पर रखकर परीक्षण कैसे किया जाए।
परीक्षण के लिए सेट अप - एक बार कोड बेस स्थापित हो जाने पर, प्रोजेक्ट का परीक्षण करने के लिए VEXcode GO में 'प्रारंभ' का चयन करें। फिर, कोड बेस के व्यवहार का अवलोकन करें।
- चुनौती पूरी होने के बाद प्रोजेक्ट को रोकने के लिए छात्रों को VEXcode GO टूलबार में 'स्टॉप' बटन का चयन करना होगा।
यदि छात्र जल्दी काम समाप्त कर लेते हैं, तो उन्हें छंटाई क्षेत्र का स्थान बदलने को कहें। उन्हें इसे मंगल ग्रह के आधार के एक वर्ग के करीब ले जाने को कहें।
- इस छंटाई क्षेत्र की अनुमानित दूरी 250 मिलीमीटर (मिमी) (~10 इंच (इंच)) है। क्या वे अपने रोबोट को डिस्क को एकत्रित करने और उसी छंटाई क्षेत्र में पहुंचाने के लिए कोड कर सकते हैं?
- सुविधा प्रदान करनाछात्रों के साथ बातचीत को सुविधाजनक बनाना, जब वे अपने प्रोजेक्ट बनाते और परीक्षण करते हैं, जैसे कि:
- डिस्क एकत्रित करने के लिए कोड बेस को किस प्रकार स्थानांतरित करने की आवश्यकता है? क्या आप मुझे अपने हाथों से दिखा सकते हैं?
- अपने कोड बेस को नए स्थान से डिस्क एकत्रित करने के लिए आपको क्या परिवर्तन करना होगा?
- कोड बेस को नए सॉर्टिंग क्षेत्र में डिस्क छोड़ने के लिए आपको कौन से पैरामीटर बदलने होंगे?
विद्यार्थियों को परीक्षण और त्रुटि के लिए तैयार करें जो कि प्रयोग का एक अभिन्न अंग है जिसमें वे इस चुनौती से जुड़ेंगे। आप अपने विद्यार्थियों के साथ समस्या-समाधान प्रक्रिया के लिए एक संरचना स्थापित करने हेतु पृष्ठभूमि पृष्ठ से समस्या-समाधान चक्र ग्राफिक को एक दृश्य सहायक के रूप में उपयोग करना चाह सकते हैं। अधिक जानकारी के लिए पृष्ठभूमि देखेंविद्यार्थियों को अपनी परियोजनाओं के समस्या निवारण तथा स्वयं समाधान निकालने में सहायता करने की रणनीतियों के लिए।

छात्र समस्या-समाधान चक्र इस चुनौती के कई संभावित समाधान हैं। निम्नलिखित एक उदाहरण है।

भाग 2 संभावित समाधान खेलेंअवधारणा पर ध्यान केंद्रित करें, परिशुद्धता पर नहीं। इस लैब का लक्ष्य एक परियोजना में इलेक्ट्रोमैग्नेट के साथ नेत्र संवेदक के उपयोग की अवधारणा पर ध्यान केंद्रित करना है। यदि छात्रों ने अपने कोड बेस को थोड़ा सा गलत संरेखित कर दिया है, या जब वे डिस्क की ओर ड्राइव करते हैं तो वह सही स्थान पर नहीं है, तो उन्हें बताएं कि डिस्क को थोड़ा सा हिलाना ठीक है, ताकि यह सुनिश्चित हो सके कि इलेक्ट्रोमैग्नेट द्वारा उसे उठा लिया जाए।
यदि छात्रों को अपने प्रोजेक्ट में ब्लॉक कमांड के साथ कोड बेस के व्यवहार को जोड़ने के लिए अतिरिक्त सहायता की आवश्यकता है, तो प्रोजेक्ट स्टेपिंग सुविधा का उपयोग करें, जिससे छात्रों को एक समय में एक ब्लॉक के माध्यम से अपने प्रोजेक्ट को देखने में मदद मिलेगी, ताकि वे देख सकें कि उनके प्रोजेक्ट में प्रत्येक ब्लॉक का निष्पादन कैसे किया जा रहा है। प्रोजेक्ट स्टेपिंग सुविधा का उपयोग करने के तरीके के बारे में अधिक जानकारी के लिए, VEXcode GO में स्टेपिंग थ्रू ब्लॉक्स ट्यूटोरियल देखें।
VEXcode GO में ब्लॉकों के माध्यम से ट्यूटोरियल - याद दिलाएंविद्यार्थियों को फ़ील्ड पर परीक्षण करने से पहले ब्लॉकों के क्रम (या अनुक्रम) और प्रत्येक ब्लॉक को उनके प्रोजेक्ट में निर्धारित मापदंडों की जांच करने के लिए याद दिलाएं।
- क्या कोड बेस बायीं ओर की बजाय दायीं ओर मुड़ गया? रोबोट को सही दिशा में घुमाने के लिए आप क्या बदलाव कर सकते हैं?
- क्या डिस्क अधिक दूर थी? कोड बेस की यात्रा के लिए सही दूरी का पता लगाने के लिए आप [ड्राइव फॉर] ब्लॉक में पैरामीटर कैसे बदल सकते हैं?
- क्या <Detects color> ब्लॉक लाल (डिस्क का रंग) पर सेट है?
कक्षा में चक्कर लगाते हुए छात्रों से प्रत्येक मुद्दे के समाधान के बारे में बात करें। यह एक पुनरावृत्तीय प्रक्रिया होगी, इसलिए विद्यार्थियों को याद दिला दें कि मंगल रोवर्स को कोड करने वाले वैज्ञानिकों को भी रोवर को अपनी इच्छानुसार चलाने के लिए कई बार प्रयास करना पड़ता है।
- पूछेंविद्यार्थियों से यह सोचने के लिए कहें कि उनका प्रोजेक्ट खेल भाग 1 से खेल भाग 2 में कैसे बदल गया है।
- लैब की शुरुआत से लेकर अब तक आपकी परियोजना में क्या बदलाव आया है?
- आपने अपनी परियोजना को बेहतर बनाने के लिए उसमें क्या परिवर्तन किया?
- आपने ऐसा क्या परिवर्तन किया जिससे इसकी सफलता कम हो गई? आपने यह कैसे फिक्स किया?