
Brincadeira
Parte 1 - Passo a Passo
- InstruaInstrua os alunos que irão desenvolver o que aprenderam no Laboratório 1 para que a Base de Código recolha e devolva uma amostra de rocha marciana (o Disco Vermelho). Mas agora, codificarão o seu robô para utilizar os dados do Eye Sensor para classificar um disco, com base na sua cor.
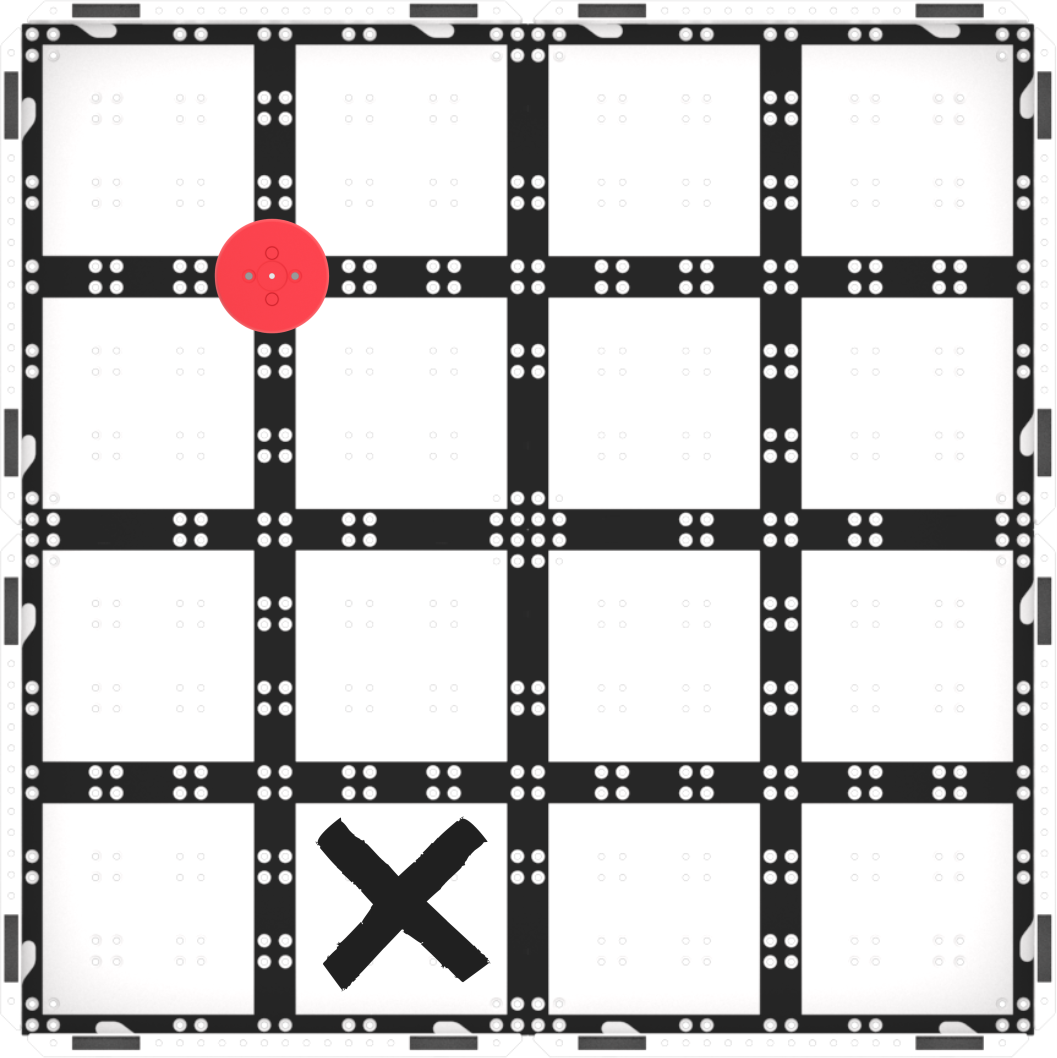
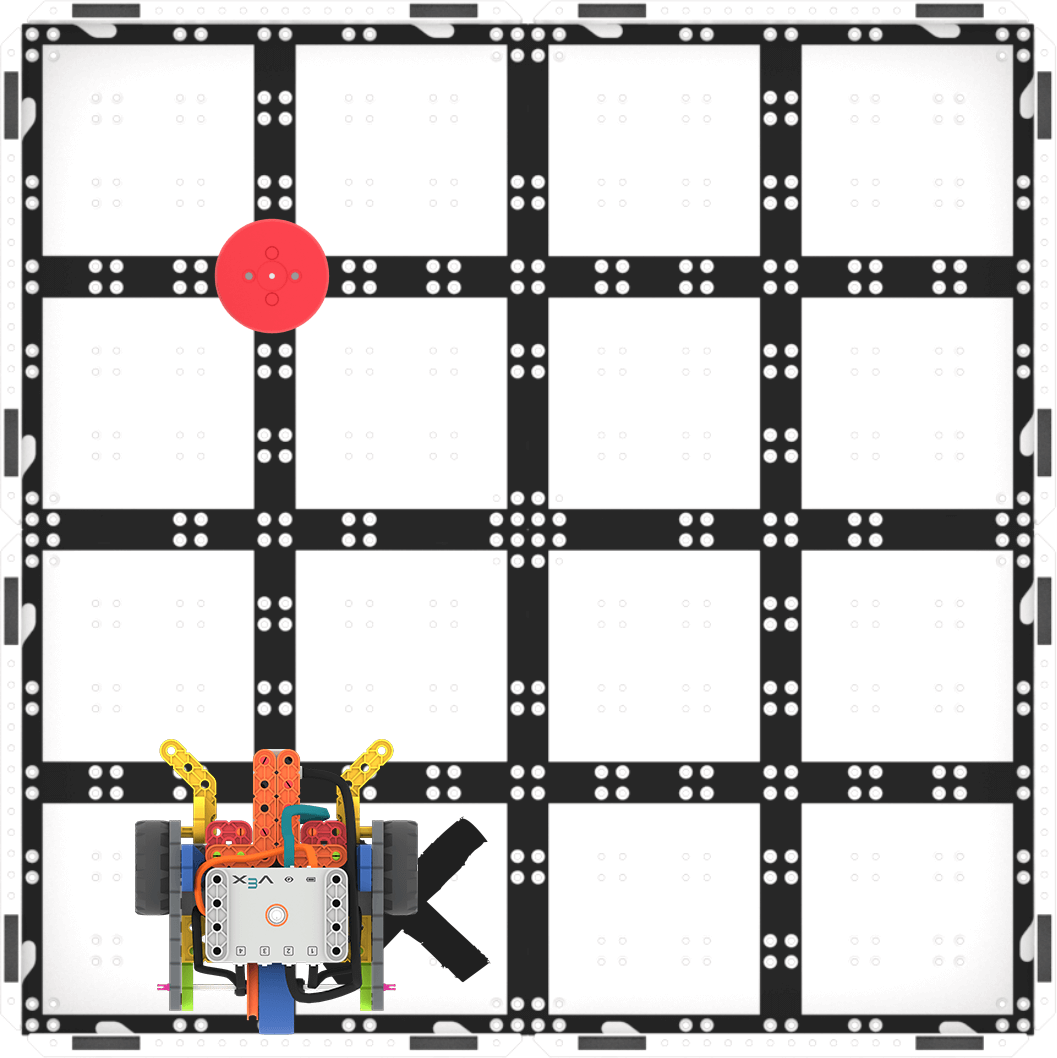
- Mostre aos alunos a configuração do Campo com a área de classificação assinalada com o X. Assim que a Base de Código recolher o Disco Vermelho, necessário largar em o quadrado com o X.
Configuração do campo - Os alunos construirão um projeto consigo e depois testá-lo-ão na superfície de Marte (o Campo). A animação abaixo mostra como o Code Base se irá mover quando este projeto for iniciado.
Arquivo de vídeo - ModeloModelo para os alunos como construir o projeto no VEXcode GO e testar os seus projetos no Campo.
- Comece por mostrar aos alunos como ligar o cérebro da sua base de código ao dispositivo no VEXcode GO. Como as etapas de ligação variam entre dispositivos, see the Connecting articles of the VEXcode GO VEX Library para os passos específicos para ligar o VEX GO Brain ao seu computador ou tablet.
- Também terão de configurar o VEXCode GO para o Code Base. If necessary, model the steps from the Configure a Code Base VEX Library article and ensure students can see the Drivetrain blocks in the Toolbox.
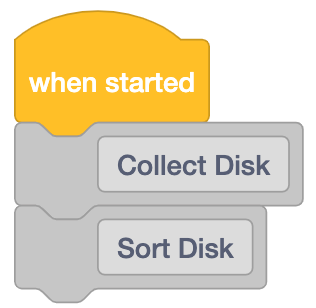
- Depois de o Code Base estar configurado, peça aos alunos que adicionem os seguintes blocos [Comentário] para planear e os seus projetos. Os blocos sob o bloco “Coletar Disco” [Comentário] conduzirão a Base de Código para recolher o Disco e regressar à Base de Marte. Os blocos sob o bloco “Sort Disk” [Comment] farão com que o Code Base utilize os dados do Eye Sensor para entregar o disco à área de classificação designada - com base na cor do disco.
Planear o projeto com blocos [Comment] - De seguida, peça aos alunos que adicionem os seguintes blocos no bloco “Recolher Disco” [Comentário] para que a unidade Code Base recolha o Disco Vermelho.
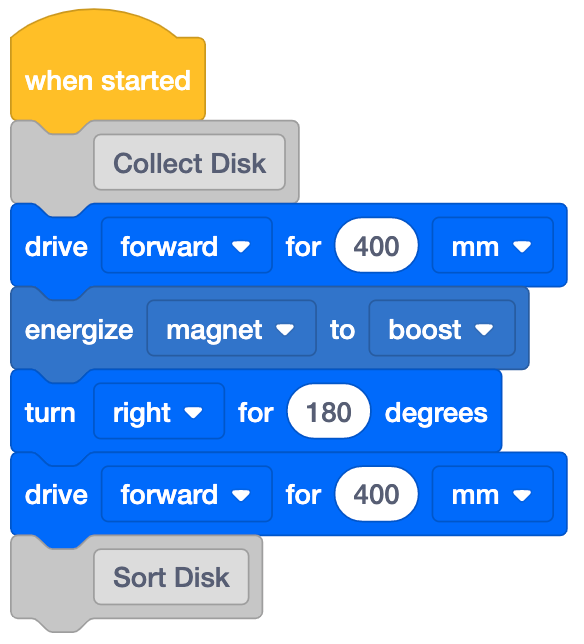
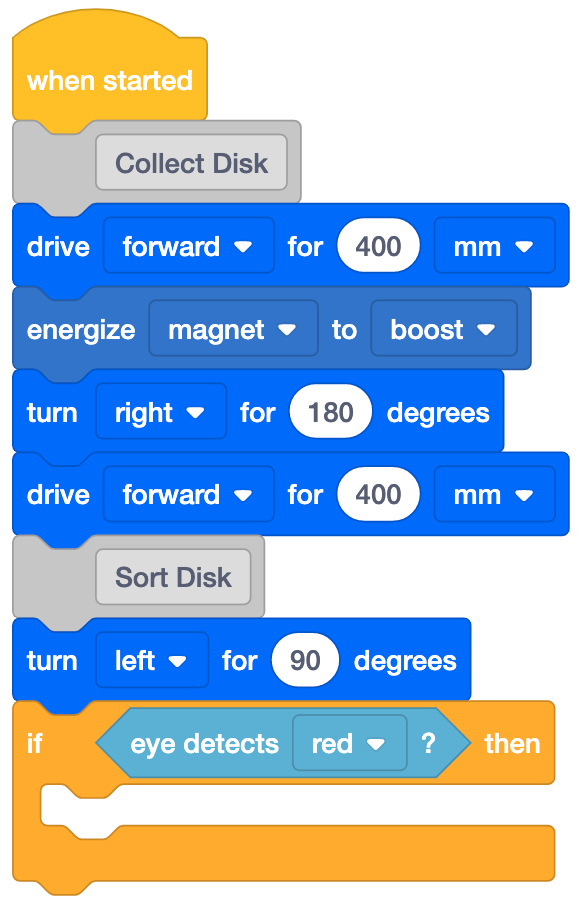
Recolher o código do disco - Em seguida, adicione-os ao projeto em conjunto para que a base de código classifique o disco. Arraste um bloco [Turn for] para o ambiente de trabalho e anexe-o abaixo do bloco “Sort Disk” [Comment]. Altere o parâmetro para 'esquerda' para que a base de código fique virada para a área de classificação.
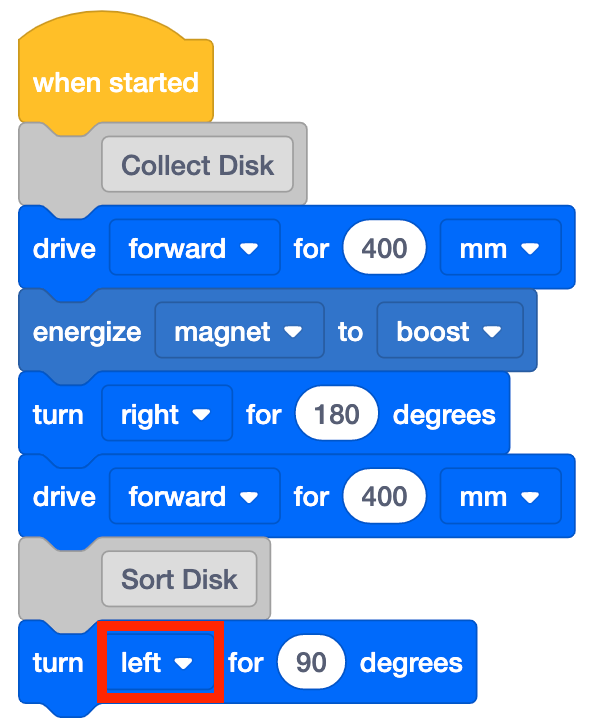
Adicione [Vire para] e defina para a esquerda - Adicione um bloco [If then] e coloque um bloco <Detects color> no hexágono. Deixe o bloco <Detects color> definido como vermelho. Isto fará com que o Code Base utilize o Eye Sensor para detetar a cor do disco. Se este disco estiver vermelho, o bloco <Detects color> reportará verdadeiro e os blocos adicionados ao interior do bloco 'C' serão executados.
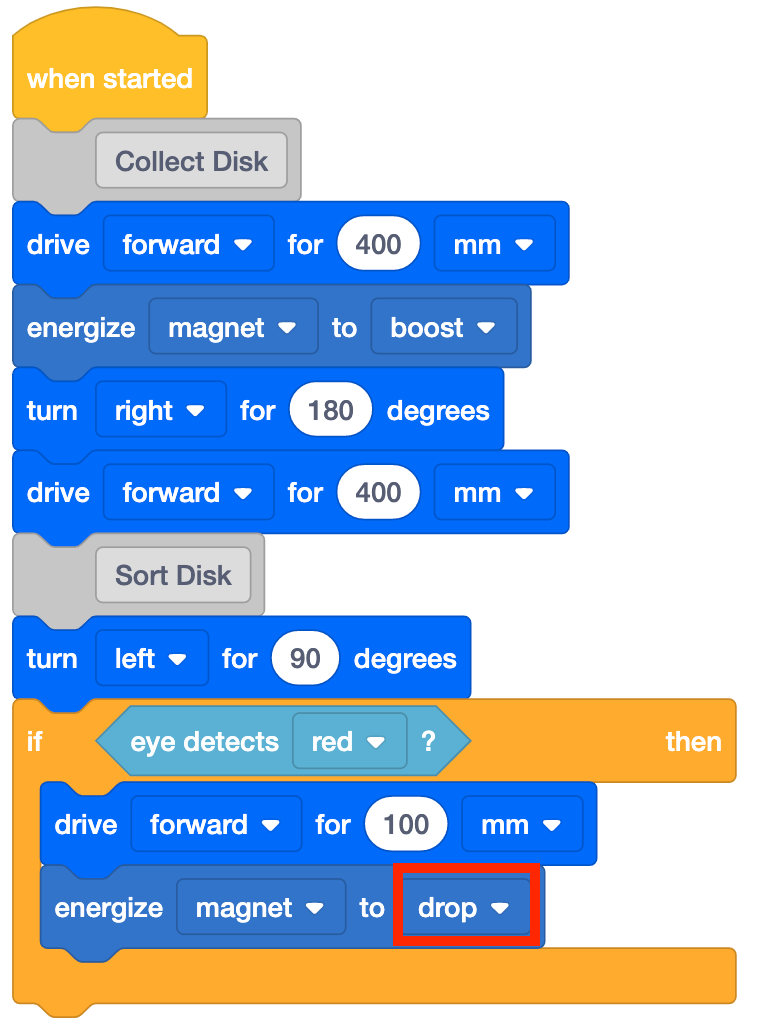
Adicione [Se então] com <Detects color> - Adicione um [Drive for] e um [Energize electromagnet] dentro do bloco [If then] e defina [Energize electromagnet] para 'drop'. Isto colocará a unidade Code Base na área de classificação e largará o disco.
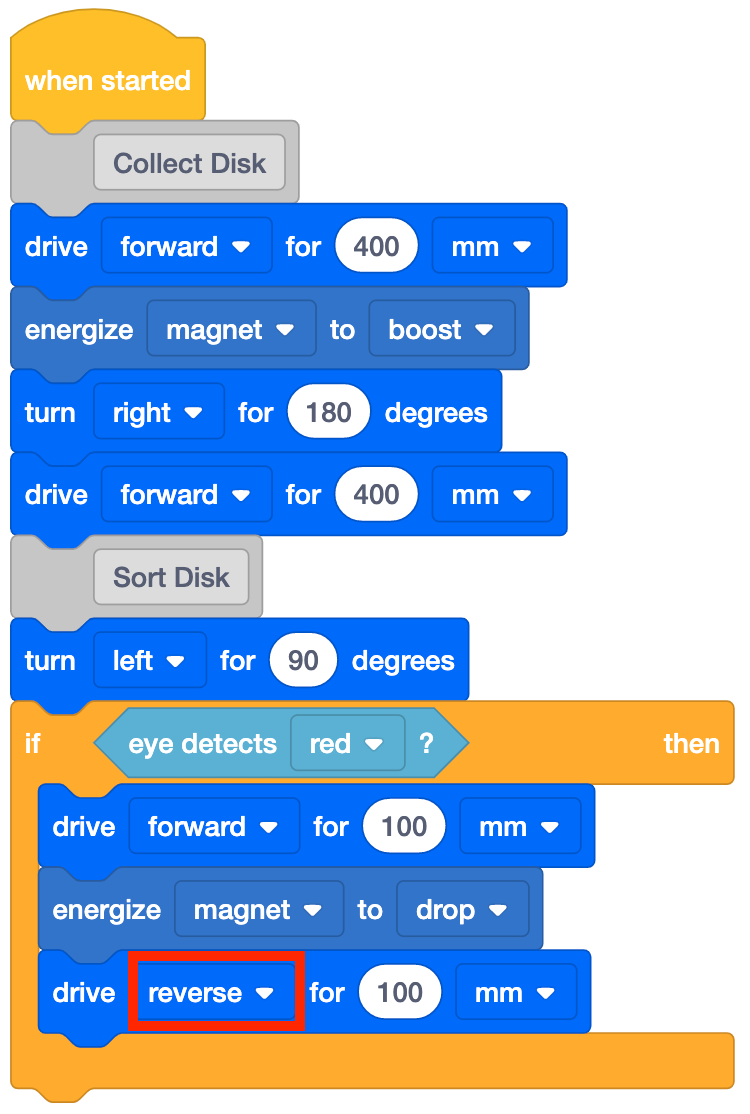
Adicione [Drive for} e [Energize eletromagnet] definido para 'drop' - Adicione um bloco [Drive for] e configure-o para reverter. Isto fará com que a Base de Código regresse à Base de Marte depois de descartar o disco.
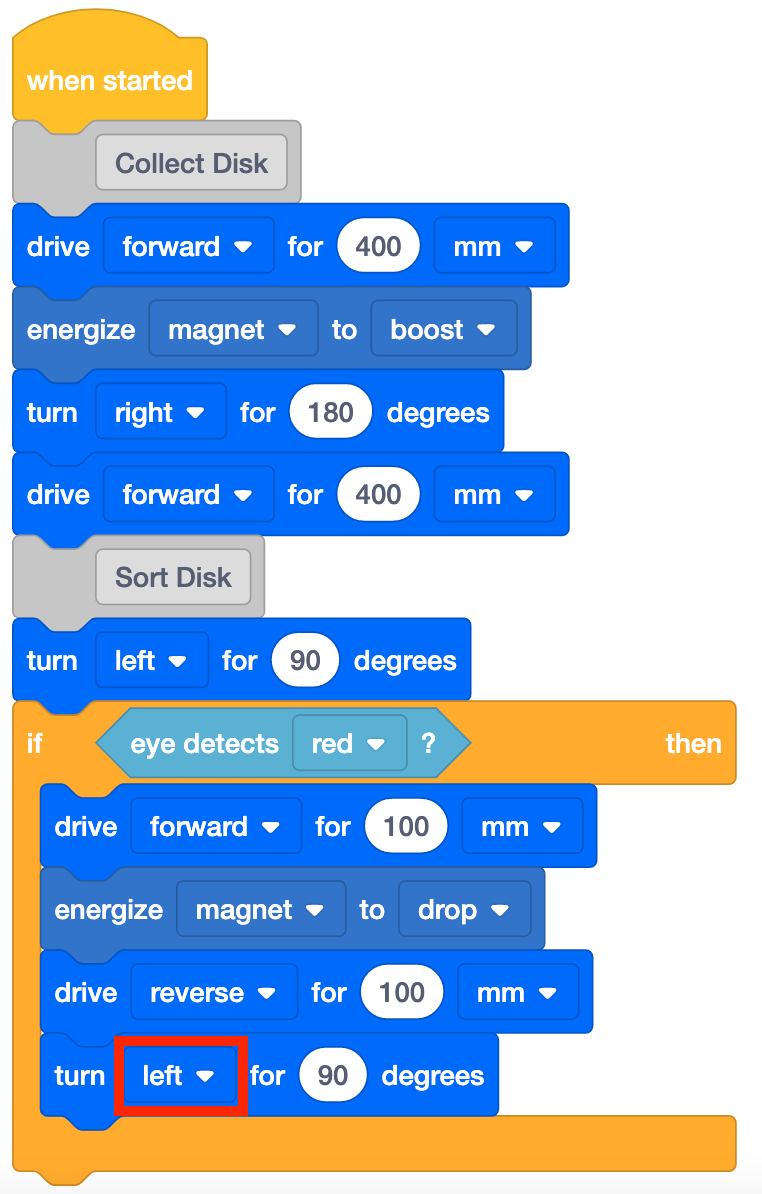
Adicione [Drive for] e configure para reverter - Por fim, adicione um bloco [Turn for] e configure-o para 'esquerda' para que a Base de Código volte à posição inicial - virada para a área de recolha da superfície de Marte.
Adicione [Drive for] e configure para reverter - Peça aos alunos que nomeiem o seu projeto como Sort Red 1 e que o guardem nos seus dispositivos. See the Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
Modelo para os alunos testarem o seu projeto no terreno.
- Primeiro, mostre-lhes como colocar o seu robô no ponto inicial (a Base de Marte) e o Disco Vermelho no Campo como mostra a imagem abaixo. Utilize as linhas de grelha no Campo para ajudar no alinhamento. O Disco e o Eletroíman podem ser alinhados em linhas de grelha que se cruzam no Campo, para facilitar a preparação dos alunos para o sucesso ao testarem os seus projetos.
Configuração para Teste - Assim que a base de código estiver instalada, selecione 'Start' no VEXcode GO para testar o projeto. Repara como a Code Base se dirige para recolher o Disco Vermelho, regressar à base e entregá-lo na área de classificação.
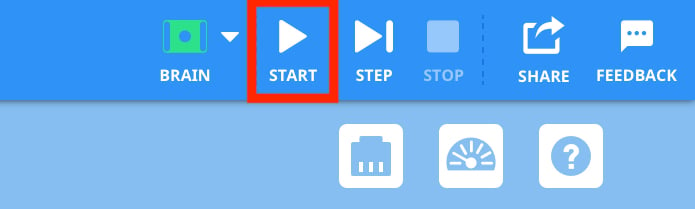
Selecione 'Iniciar' para testar o projeto - Os alunos terão de selecionar o botão 'Parar' na barra de ferramentas VEXcode GO para parar o projeto.
- Para os alunos que terminam mais cedo e precisam de desafios adicionais, peça-lhes que movam o Disco Vermelho para um local diferente. Podem ajustar o seu código para que a Base de Código recolha o disco e o entregue na mesma área de classificação?
- FacilitarFacilitar uma conversa com os alunos enquanto testam os seus projetos.
- Como é que o Código Base sabe quando energizar o Eletroíman?
- Que blocos são utilizados para que a Base de Código detete a cor do Disco?
- O que aconteceria se o Code Base não detetasse o vermelho?
Concentre-se no conceito, não na precisão. O objetivo deste Laboratório é focar o conceito de utilização do Eletroíman num projeto. Se os alunos desalinharem ligeiramente o robô ou se o disco não estiver exatamente no lugar certo quando conduzem para ele, informe os de que não há problema em mover um pouco o disco para garantir que é captado pelo eletroíman.
- LembreLembre os alunos de verificarem os parâmetros nos blocos [Drive for] para garantir que o projeto tem as distâncias corretas necessárias para recolher e depois classificar o disco.
- Devem também verificar se os parâmetros nos blocos [Turn for] estão configurados para que a Base de Código gire na direção correta para regressar à Base de Marte e em direção à área de classificação.
Para incentivar uma mentalidade construtiva e ajudar os alunos a adotar a tentativa e o erro que faz parte da codificação a aprender com os erros ao longo do caminho, faça perguntas como:
- Que erro cometeu que lhe ensinou alguma coisa?
- Que parte do laboratório é complicada ou está a fazer pensar muito?
- PerguntaPergunta aos alunos como é que o Perseverance Rover poderia utilizar um sensor ocular para recolher informação e estudar as diferentes amostras de rochas e solo marcianos. O que poderia o Perseverance Rover estudar com o Eye Sensor?
Discussão em grupo ao intervalo & a meio do jogo
Assim que cada grupo tiver testado o seu projeto para que a Base de Código recolha e entregue o Disco Vermelho na área de classificação, reúna-se para uma breve conversa .
Acompanhe o progresso dos alunos e converse sobre o que o Code Base está a fazer nos seus projetos.
- Como funciona o Eye Sensor no nosso projeto? Que bloco(s) controlam o sensor ocular?
- Como fez o Eletroíman funcionar com o Sensor ocular no seu projeto?
- E se alterarmos a localização dos discos? Este projeto ainda vai funcionar? Porquê ou por que não? Que parâmetros mudaria?
Parte 2 - Passo a Passo
- InstruaInstrua os alunos de que aplicarão o que aprenderam na Parte 1 do Jogo para iterar nos seus projetos para fazer com que a Base de Código recolha o Disco Vermelho de um novo local e o liberte numa nova área de classificação. Terão de alterar os parâmetros nos seus projetos para que a base de código recolha e classifique o disco com êxito.
- Mostre aos alunos a nova configuração do Campo e forneça-lhes as distâncias percorridas para que se possam concentrar no código deste projeto. A Base de Código terá de conduzir 200 milímetros (~8 polegadas) para recolher o disco e 350 milímetros (mm) (~14 polegadas (pol.)) para a nova área de classificação.
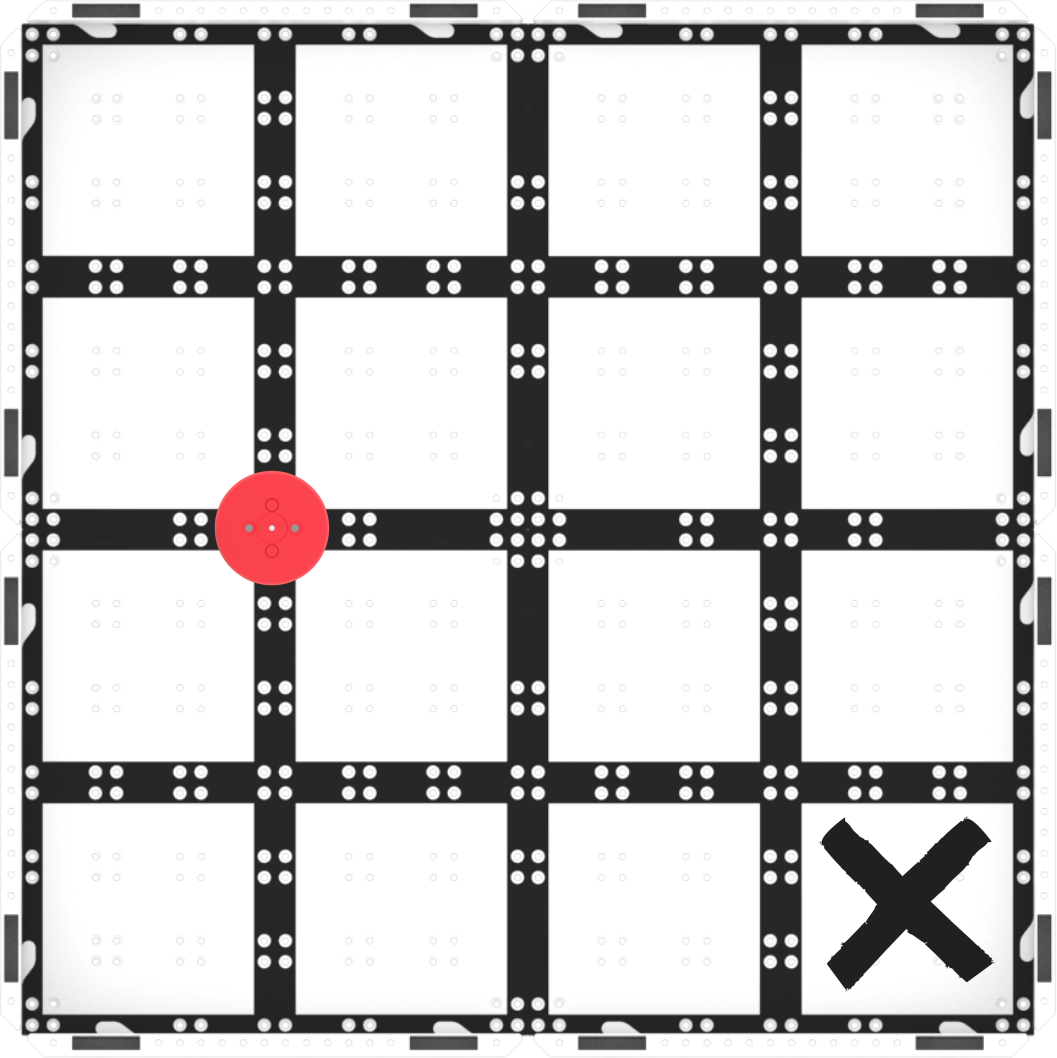
Jogue a Parte 2 Configuração do Campo - A animação seguinte mostra uma forma possível de a Base de Código se mover para completar o desafio.
Arquivo de vídeo - ModeloModelo para os alunos como iniciar os seus projetos no VEXcode GO.
- Se necessário, mostre aos alunos como ligar o Cérebro na sua Base de Código ao dispositivo no VEXcode GO. Como as etapas de ligação variam entre dispositivos, see the Connecting articles of the VEXcode GO VEX Library para os passos específicos para ligar o VEX GO Brain ao seu computador ou tablet.
- If necessary, model the steps from the Configure a Code Base VEX Library article and ensure students can see the Drivetrain blocks in the Toolbox.
- Peça aos alunos que nomeiem o seu projeto como Sort Red 2 e que o guardem nos seus dispositivos. See the Secção Abrir e Guardar da Biblioteca VEXcode GO VEX para os passos específicos do dispositivo para guardar um projeto VEXcode GO.
Se necessário, mostre aos alunos como testar o seu projeto no terreno.
- Mostre-lhes como configurar o teste colocando a Base de Código na Base de Marte.
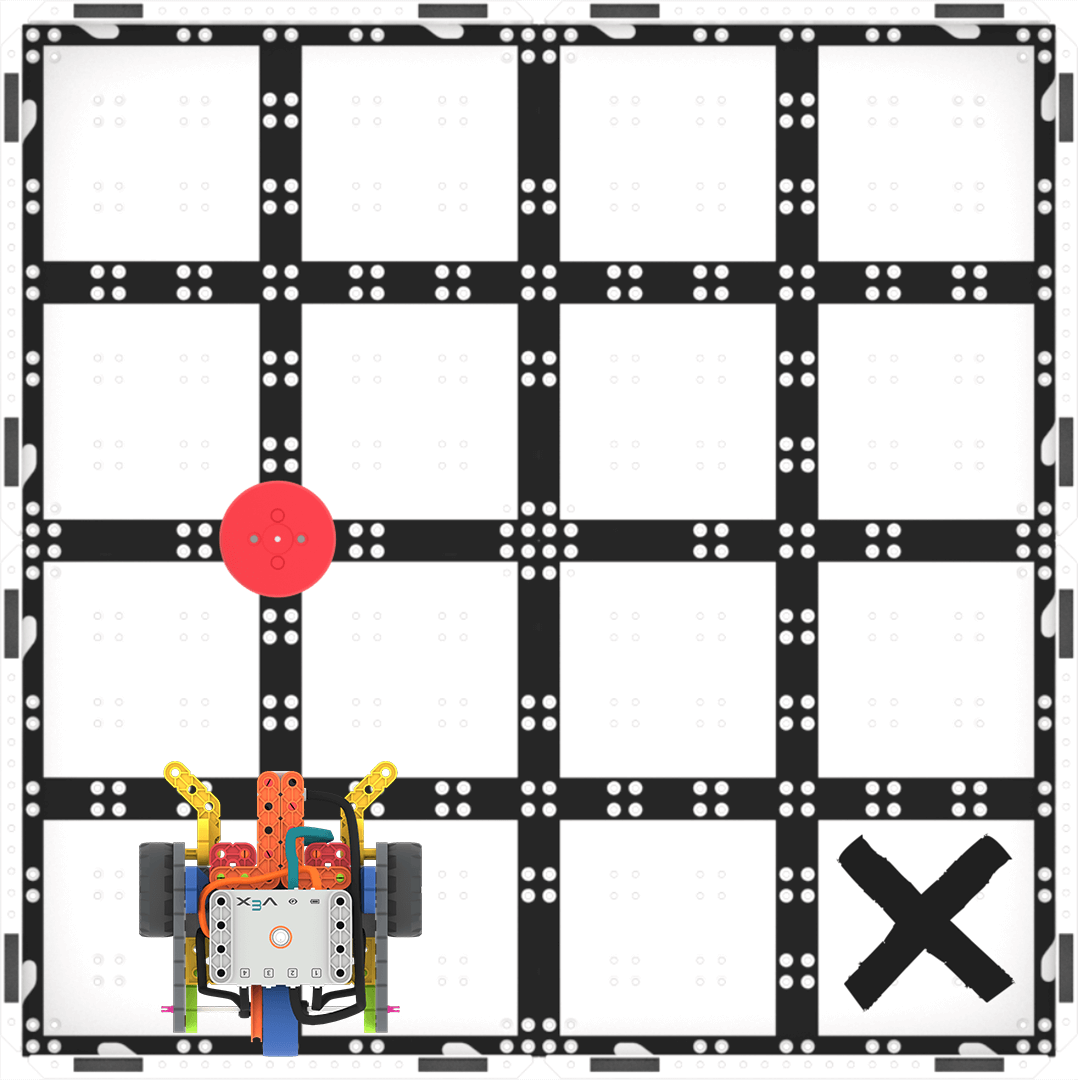
Configurar para testar - Assim que a base de código estiver instalada, selecione 'Start' no VEXcode GO para testar o projeto. De seguida, observe os comportamentos do Code Base.
- Os alunos terão de selecionar o botão 'Parar' na barra de ferramentas VEXcode GO para interromper o projeto após a conclusão do desafio.
Se os alunos terminarem mais cedo, peça-lhes que mudem a localização da área de classificação. Peça-lhes que o movam um quadrado para mais perto da Base de Marte.
- A distância aproximada para esta área de classificação é de 250 milímetros (mm) (~10 polegadas (pol.)). Conseguem codificar o seu robô para recolher e entregar o disco na mesma área de classificação?
- FacilitarFacilite uma conversa com os alunos enquanto constroem e testam os seus projetos com questões como:
- Como é que a Base de Código precisa de ser movida para recolher o Disco? Pode mostrar-me com as mãos?
- O que precisa de alterar para que a sua base de código recolha o disco no novo local?
- Que parâmetros precisa de alterar para que a Base de Código solte o Disco na nova área de classificação?
Preparar os alunos para a tentativa e erro que é parte intrínseca da experimentação que vão realizar neste desafio. Pode utilizar o gráfico do ciclo de resolução de problemas da página Fundo como um auxiliar visual para estabelecer uma estrutura para o processo de resolução de problemas com os seus alunos. See the Background for more information for strategies to help students troubleshoot their projects and come up with their own solutions.
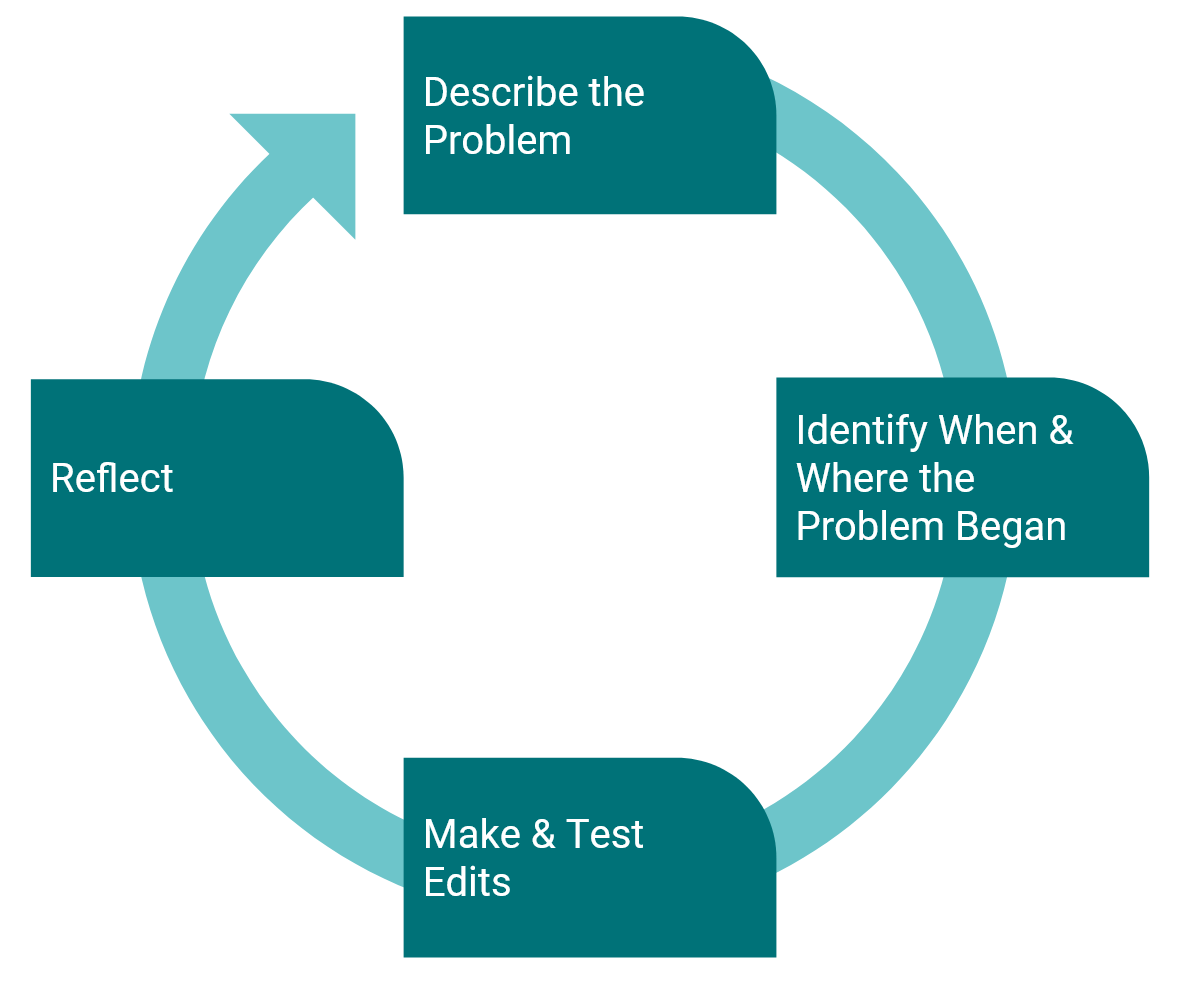
Ciclo de Resolução de Problemas dos Alunos Existem muitas soluções possíveis para este desafio. O seguinte é um exemplo.

Jogue a Parte 2 Possível Solução Concentre-se no conceito, não na precisão. O objetivo deste Laboratório é focar o conceito de utilização do Sensor Ocular com o Eletroíman num projeto. Se os alunos desalinharem ligeiramente a sua base de código ou se o disco não estiver exatamente no lugar certo quando conduzem em direção a ele, informe-os de que não há problema em mover o disco ligeiramente para garantir que é captado pelo eletroíman.
Se os alunos precisarem de apoio adicional para ligar os comportamentos do Code Base com os comandos de bloco do seu projeto, utilize a funcionalidade Project Stepping para ajudar os alunos a percorrer o projeto, um bloco de cada vez, para ver como cada bloco está a ser executado no seu projeto. Para obter mais informações sobre como utilizar a funcionalidade Project Stepping, consulte o tutorial Stepping Through Blocks no VEXcode GO.
Tutorial Através de Blocos no VEXcode GO - RecordarLembre os alunos de verificarem a ordem (ou sequência) dos blocos e os parâmetros definidos para cada bloco nos seus projetos antes de testarem no Campo.
- A Base de Código virou para a direita em vez de virar para a esquerda? O que pode alterar para que o robô gire na direção correta?
- O disco estava mais longe? Como pode alterar o parâmetro no bloco [Drive for] para encontrar a distância certa para o Code Base percorrer?
- O bloco <Detects color> está definido para Vermelho (a cor do disco)?
Converse com os alunos sobre a solução de cada problema enquanto circula pela sala de aula. Este será um processo iterativo, por isso lembre aos alunos que os cientistas que codificam os rovers de Marte também têm de tentar várias vezes para que o rover se mova como pretendiam.
- PerguntePeça aos alunos para pensarem sobre a forma como o seu projeto mudou da Peça 1 para a Parte 2.
- Como é que o seu projeto mudou desde o início do Laboratório até agora?
- O que alterou no seu projeto para que funcionasse melhor?
- Que mudança fez que o tornou menos bem-sucedido? Como é que o consertou?