
يلعب
الجزء الأول - خطوة بخطوة
- الطلاب إلى أنهم سوف يقومون بالبناء على ما تعلموه في المختبر 1 لجعل قاعدة التعليمات البرمجية تجمع عينة من صخور المريخ (القرص الأحمر) وتعيدها. لكن الآن، سيقومون ببرمجة الروبوت الخاص بهم لاستخدام بيانات مستشعر العين لفرز القرص، بناءً على لونه.
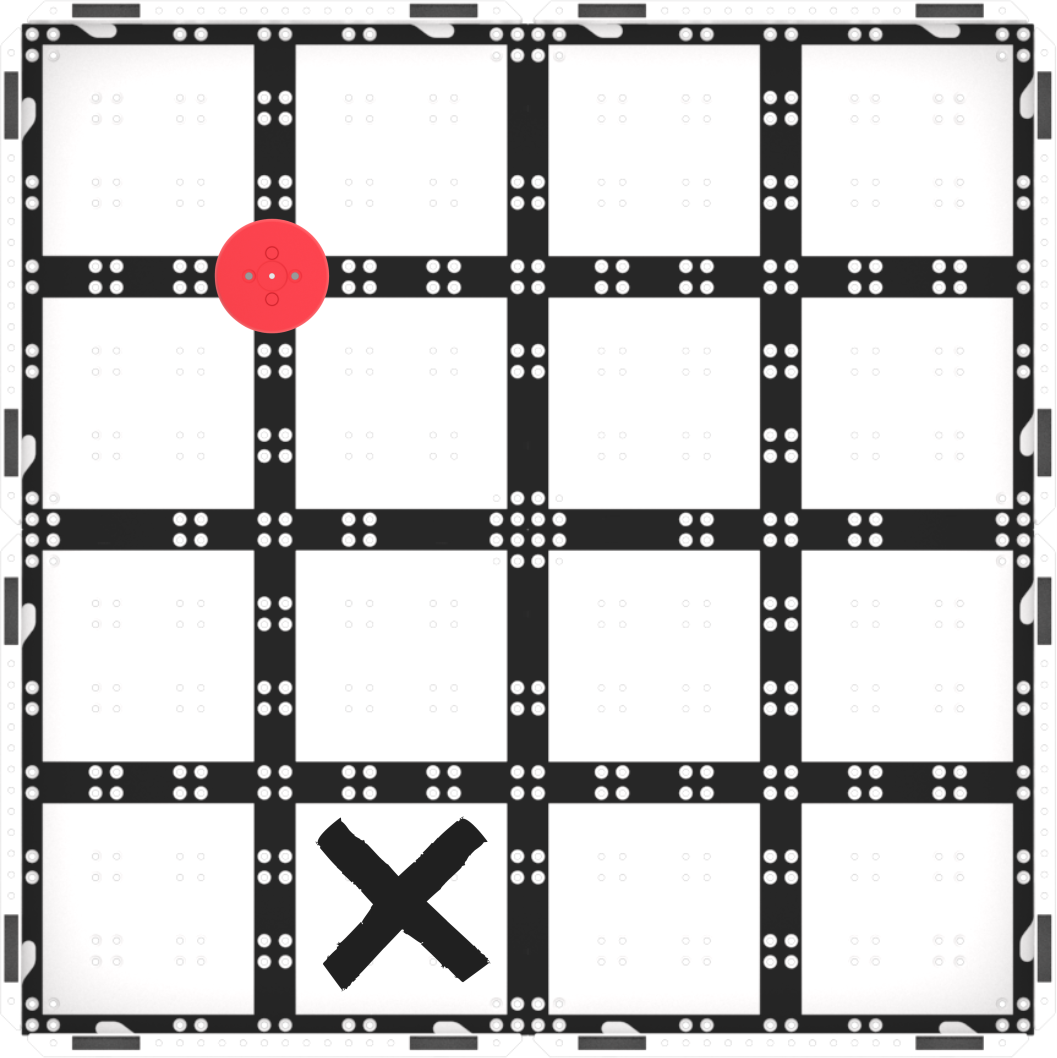
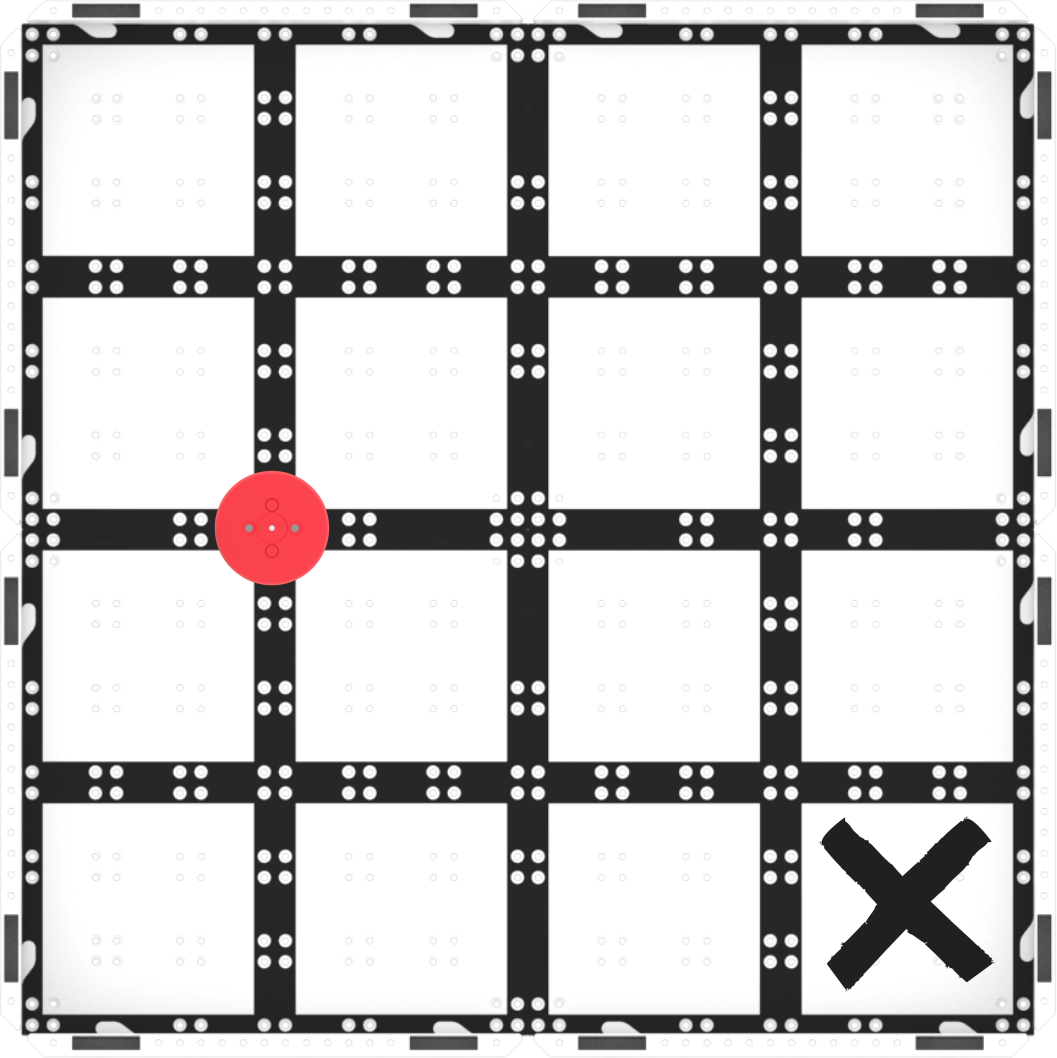
- أظهر للطلاب إعداد الحقل مع منطقة الفرز المحددة بعلامة X. بمجرد أن تجمع قاعدة التعليمات البرمجية القرص الأحمر، تحتاج إلى في الذي يحتوي على علامة X.
إعداد الحقل - سيقوم الطلاب ببناء مشروع معك ثم اختباره على سطح المريخ (الميدان). يوضح الرسم المتحرك أدناه كيفية تحرك قاعدة التعليمات البرمجية عند بدء هذا المشروع.
ملف الفيديو - نموذجنموذج للطلاب حول كيفية بناء المشروع في VEXcode GO واختبار مشاريعهم على أرض الواقع.
- ابدأ بإظهار للطلاب كيفية ربط الدماغ في قاعدة التعليمات البرمجية الخاصة بهم بجهازهم في VEXcode GO. لأن خطوات الاتصال تختلف بين الأجهزة, انظر Connecting articles of the VEXcode GO VEX Library للحصول على خطوات محددة لتوصيل VEX GO Brain بالكمبيوتر أو الجهاز اللوحي.
- سوف يحتاجون أيضًا إلى تكوين VEXCode GO لقاعدة التعليمات البرمجية. If necessary, model the steps from the Configure a Code Base مقالة مكتبة VEX and ensure students can انظر Drivetrain blocks in the Toolbox.
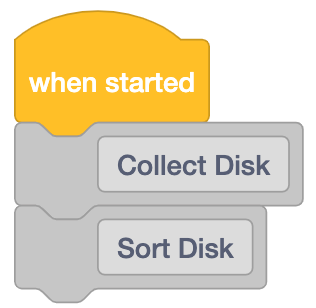
- بمجرد تكوين قاعدة التعليمات البرمجية، اطلب من الطلاب إضافة كتل [التعليق] التالية للتخطيط مشاريعهم. ستعمل الكتل الموجودة أسفل كتلة "جمع القرص" [التعليق] على دفع قاعدة التعليمات البرمجية إلى جمع القرص والعودة إلى قاعدة المريخ. ستتضمن الكتل الموجودة أسفل كتلة "فرز القرص" [التعليق] قاعدة التعليمات البرمجية التي تستخدم بيانات مستشعر العين لتسليم القرص إلى منطقة الفرز المحددة — بناءً على لون القرص.
خطة المشروع مع كتل [التعليق] - بعد ذلك، اطلب من الطلاب إضافة الكتل التالية أسفل كتلة "تجميع القرص" [التعليق] لجعل محرك قاعدة التعليمات البرمجية يقوم بتجميع القرص الأحمر.
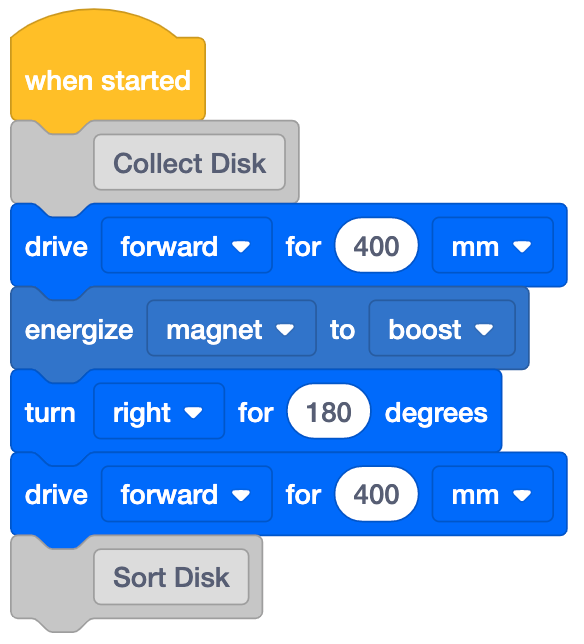
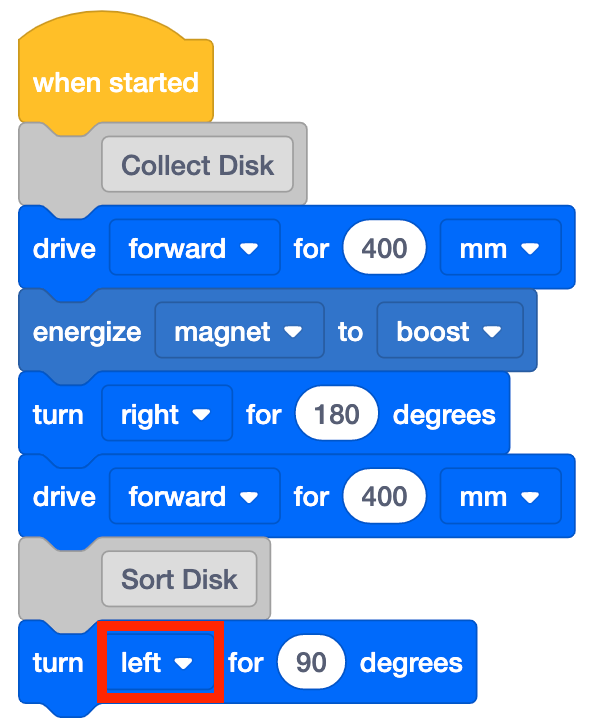
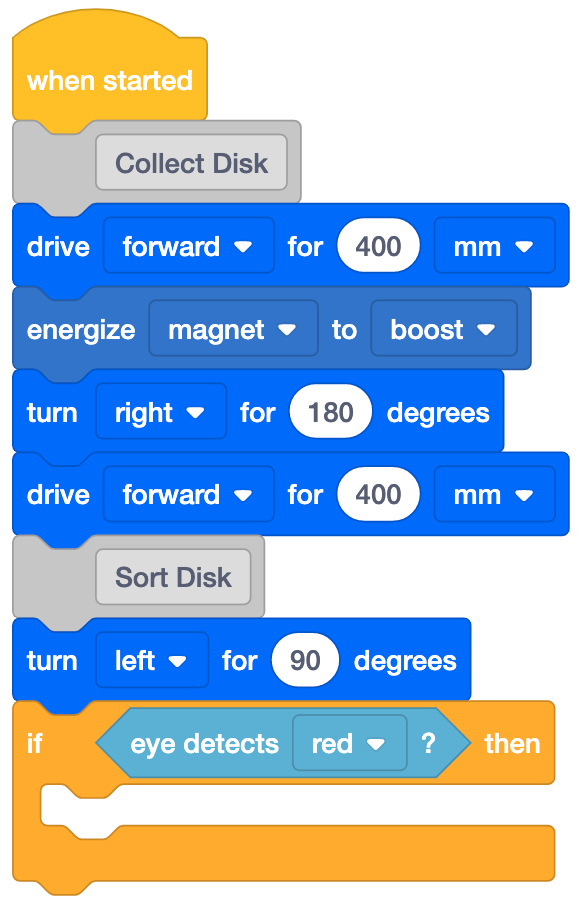
جمع رمز القرص - بعد ذلك، أضف إلى المشروع معًا لجعل قاعدة التعليمات البرمجية تقوم بفرز القرص. اسحب كتلة [Turn for] إلى مساحة العمل وألصقها أسفل كتلة [Comment] "Sort Disk". قم بتغيير المعلمة إلى "يسار" لتوجيه قاعدة التعليمات البرمجية نحو منطقة الفرز.
أضف [الدوران] واضبطه على اليسار - أضف كتلة [إذا ثم]، ثم ضع كتلة <Detects color> في السداسي. اترك الكتلة <Detects color> مضبوطة على اللون الأحمر. سيؤدي هذا إلى جعل قاعدة التعليمات البرمجية تستخدم مستشعر العين للكشف عن لون القرص. إذا كان هذا القرص باللون الأحمر، فسوف يتم الإبلاغ عن الكتلة <Detects color> على أنها صحيحة، وسيتم تشغيل الكتل المضافة إلى داخل الكتلة "C".
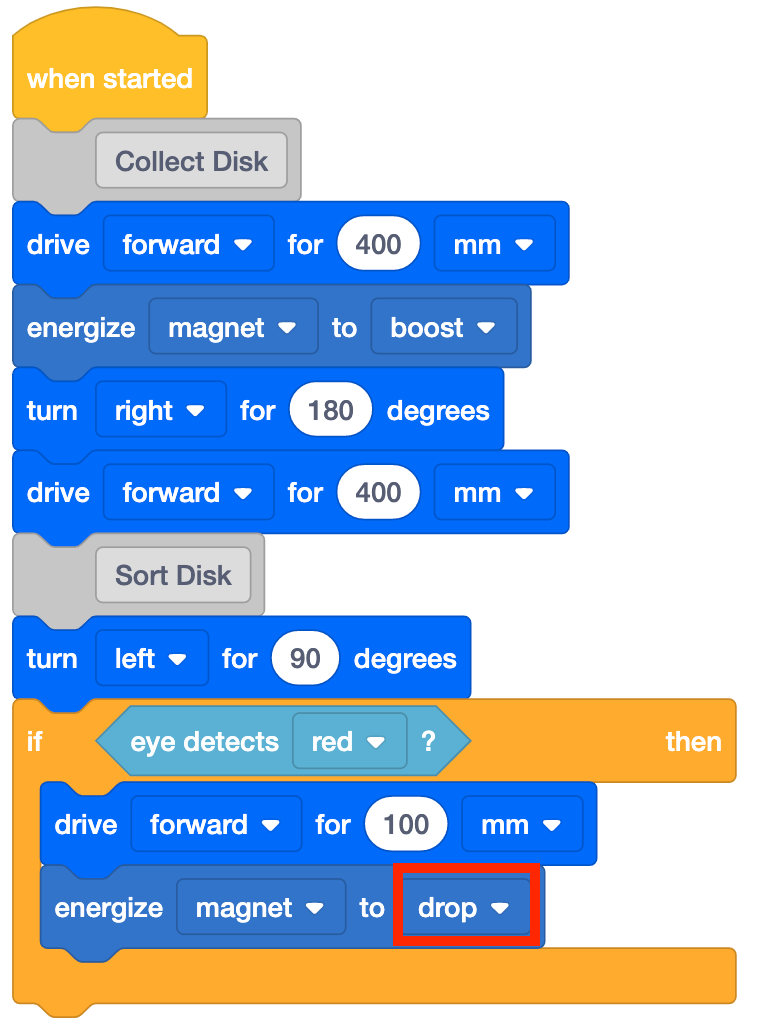
أضف [إذا ثم] مع <Detects color> - أضف [قيادة من أجل] و[تنشيط المغناطيس الكهربائي] داخل كتلة [إذا ثم] واضبط [تنشيط المغناطيس الكهربائي] على 'إسقاط'. سيؤدي هذا إلى توجيه قاعدة التعليمات البرمجية إلى منطقة الفرز وإسقاط القرص.
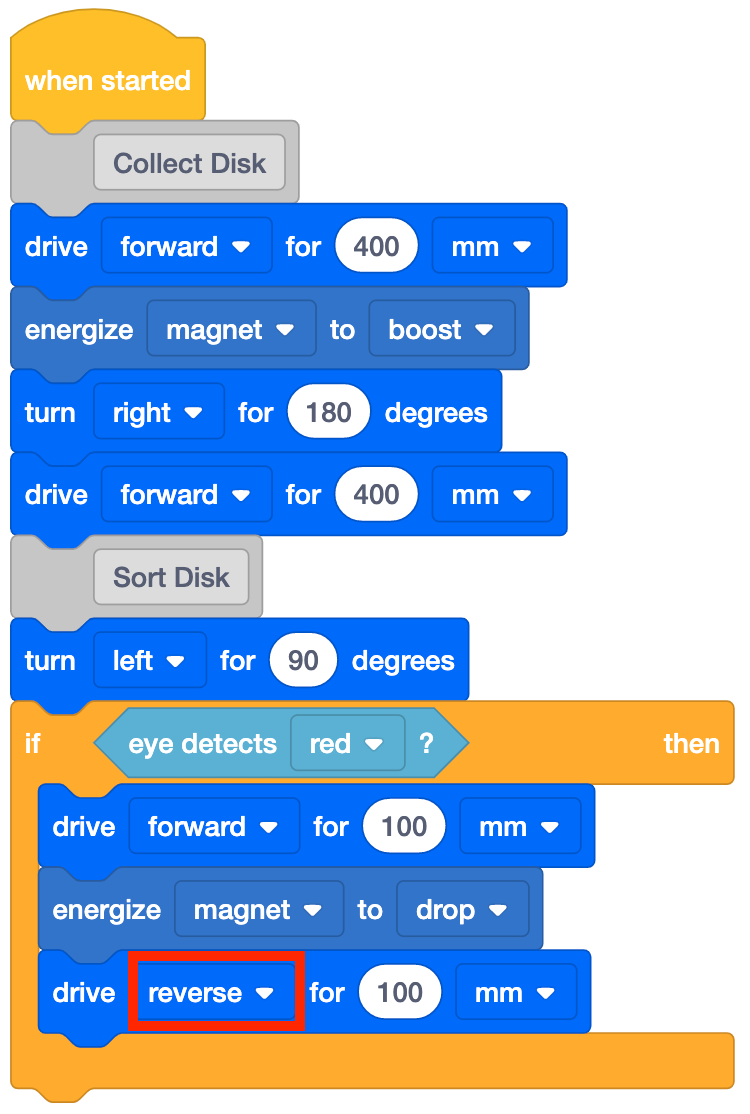
أضف [Drive for] و[Energize electromagnet] مضبوطين على "drop" - أضف كتلة [Drive for] واضبطها على العكس. سيؤدي هذا إلى عودة قاعدة التعليمات البرمجية إلى قاعدة المريخ بعد إسقاط القرص.
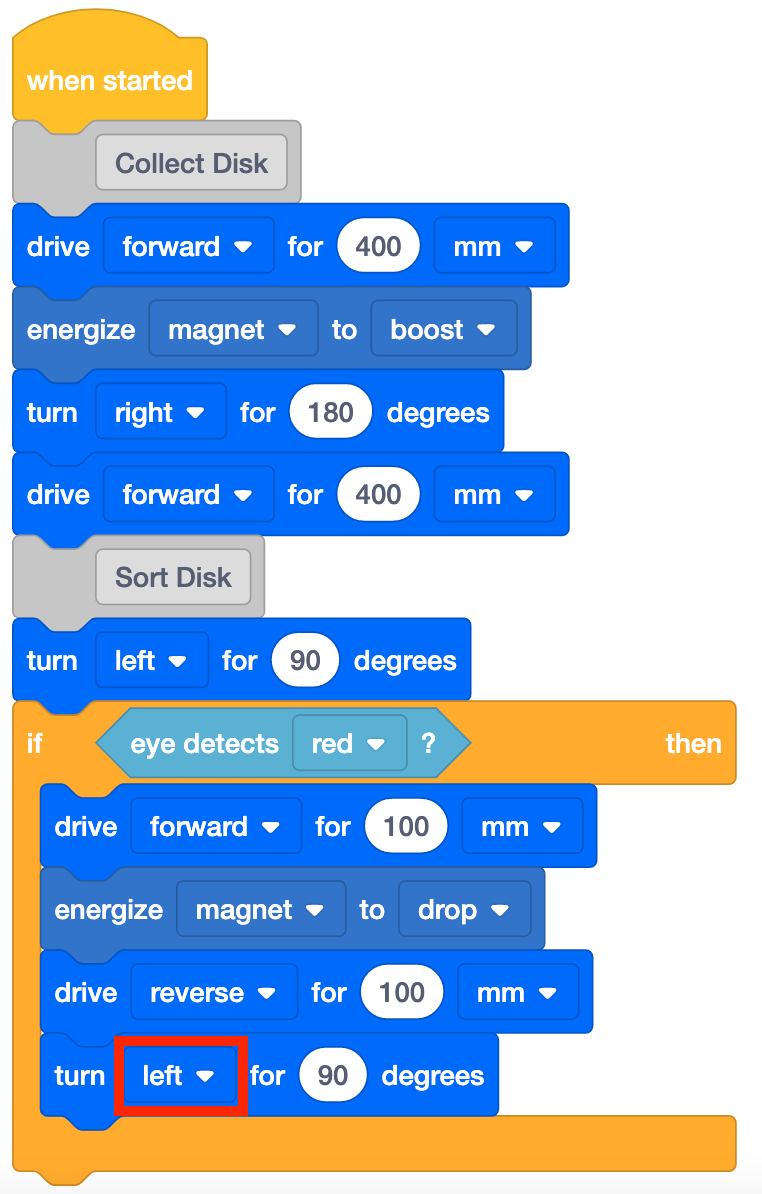
أضف [Drive for] واضبطه على الوضع العكسي - أخيرًا، أضف كتلة [Turn for]، واضبطها على "يسار" لجعل قاعدة التعليمات البرمجية ترجع إلى موضع البداية - مواجهًا منطقة جمع سطح المريخ.
أضف [Drive for] واضبطه على الوضع العكسي - اطلب من الطلاب تسمية مشروعهم بـ فرز أحمر 1 وحفظه على أجهزتهم. انظر Open and Save section of the VEXcode GO VEX Library for device-specific steps to save a VEXcode GO project.
نموذج للطلاب حول كيفية اختبار مشروعهم ميدانيا.
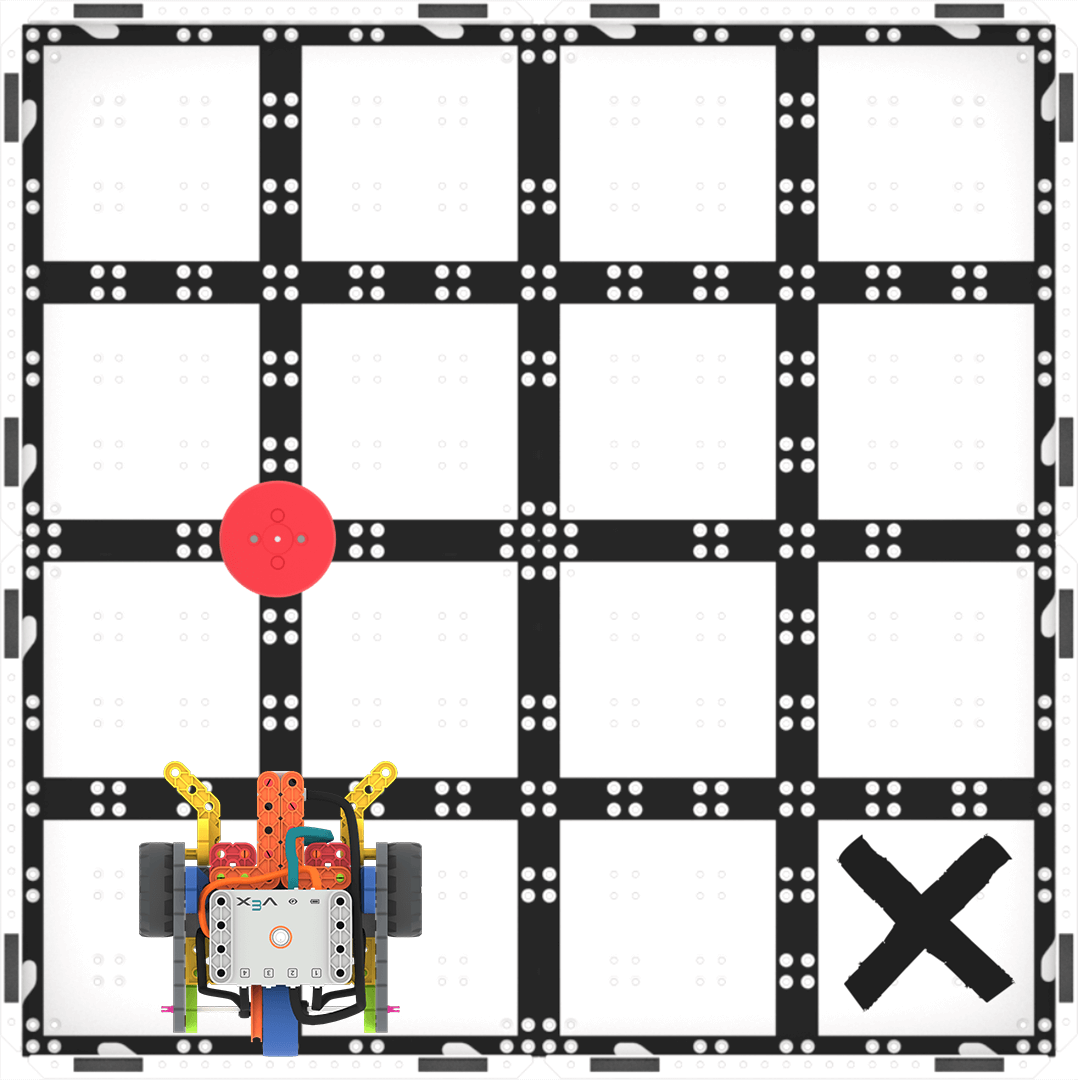
- أولاً، أظهر لهم كيفية وضع الروبوت الخاص بهم في نقطة البداية (قاعدة المريخ) والقرص الأحمر في الحقل كما هو موضح في الصورة أدناه. استخدم خطوط الشبكة الموجودة في الحقل للمساعدة في المحاذاة. يمكن محاذاة القرص والمغناطيس الكهربائي على خطوط الشبكة المتقاطعة للحقل، لتسهيل إعداد الطلاب للنجاح عند اختبار مشاريعهم.
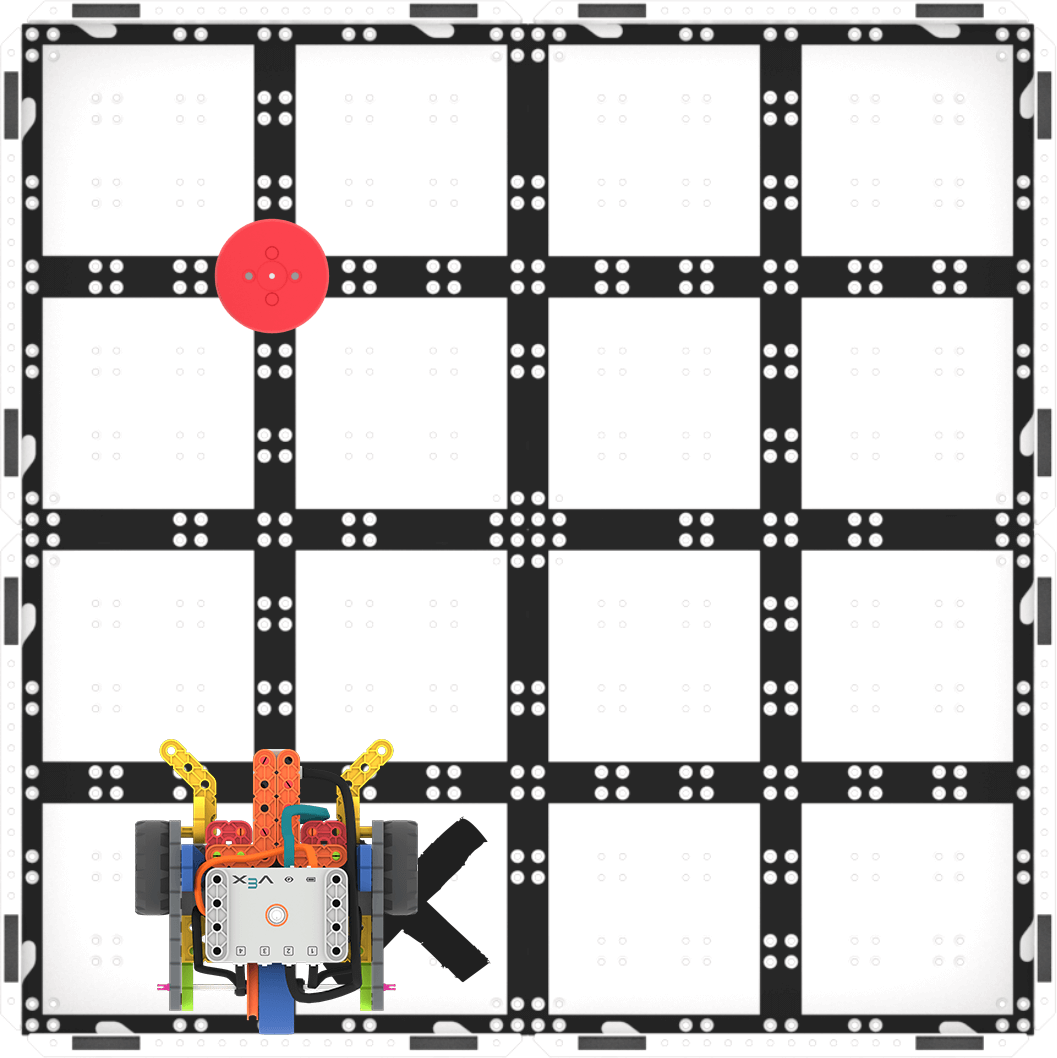
الإعداد للاختبار - بمجرد وضع قاعدة التعليمات البرمجية في مكانها، حدد "ابدأ" في VEXcode GO لاختبار المشروع. قاعدة التعليمات البرمجية وهي تقود لجمع القرص الأحمر، ثم تعود إلى القاعدة، ثم تقوم بتسليمه إلى منطقة الفرز.
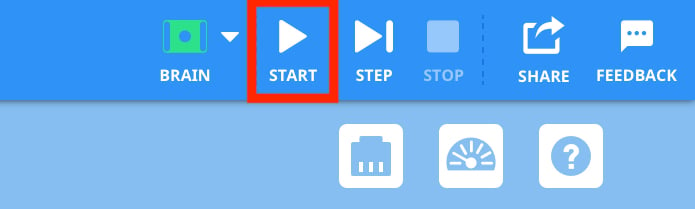
حدد "ابدأ" لاختبار المشروع - سيتعين على الطلاب تحديد زر "إيقاف" في شريط أدوات VEXcode GO لإيقاف المشروع.
- بالنسبة للطلاب الذين ينتهون مبكرًا ويحتاجون إلى تحديات إضافية، اطلب منهم نقل القرص الأحمر إلى موقع مختلف. هل يمكنهم تعديل الكود الخاص بهم ليقوم قاعدة الكود بجمع القرص وتسليمه إلى نفس منطقة الفرز؟
- تسهيلتسهيل المحادثة مع الطلاب أثناء اختبارهم لمشاريعهم.
- كيف يعرف Code Base متى يجب تنشيط المغناطيس الكهربائي؟
- ما هي الكتل المستخدمة لتمكين قاعدة التعليمات البرمجية من اكتشاف لون القرص؟
- ماذا سيحدث إذا لم يكتشف Code Base اللون الأحمر؟
ركز على المفهوم، وليس على الدقة. الهدف من هذا المختبر هو التركيز على مفهوم استخدام المغناطيس الكهربائي في المشروع. إذا قام الطلاب بمحاذاة الروبوت بشكل غير صحيح قليلاً، أو لم يكن القرص في المكان الصحيح تمامًا عندما يقودون نحوه، فأخبرهم من الجيد تحريك القرص قليلاً للتأكد من التقاطه بواسطة المغناطيس الكهربائي.
- تذكيرذكّر الطلاب بالتحقق من المعلمات الموجودة في كتل [القيادة من أجل] للتأكد من أن المشروع يحتوي على المسافات الصحيحة اللازمة لجمع القرص ثم فرزه.
- يجب عليهم أيضًا التحقق من ضبط المعلمات الموجودة في كتل [الدوران من أجل] لتوجيه قاعدة التعليمات البرمجية إلى الاتجاه الصحيح للعودة إلى قاعدة المريخ ونحو منطقة الفرز.
لتشجيع عقلية النمو ومساعدة الطلاب على تبني مبدأ التجربة والخطأ الذي يشكل جزءًا من البرمجة من الأخطاء على طول الطريق، اطرح أسئلة مثل:
- ما هو الخطأ الذي ارتكبته والذي علمك شيئًا؟
- ما هو الجزء من المختبر الذي يعتبر صعبًا، أو الذي يجعلك تفكر كثيرًا؟
- اسألاسأل الطلاب كيف يمكن لمركبة Perseverance Rover استخدام مستشعر العين لجمع المعلومات ودراسة عينات الصخور والتربة المريخية المختلفة. ما الذي يمكن لمركبة المثابرة أن تدرسه باستخدام مستشعر العين؟
مناقشة جماعية & استراحة منتصف اللعب
بمجرد أن تقوم كل مجموعة باختبار مشروعها لجمع قاعدة التعليمات البرمجية وتسليم القرص الأحمر إلى منطقة الفرز، يجتمعون معًا لإجراء محادثة قصيرة .
قم بالاطلاع على تقدم الطلاب وتحدث عن ما يفعله Code Base في مشاريعهم.
- كيف يعمل مستشعر العين في مشروعنا؟ ما هي الكتل التي تتحكم في مستشعر العين؟
- كيف قمت بجعل المغناطيس الكهربائي يعمل مع مستشعر العين في مشروعك؟
- ماذا لو قمنا بتغيير موقع الأقراص؟ هل سيظل هذا المشروع ناجحا؟ لماذا أو لماذا لا؟ ما هي المعايير التي تريد تغييرها؟
الجزء الثاني - خطوة بخطوة
- الطلاب إلى أنهم سوف يطبقون ما تعلموه في الجزء الأول من اللعب لتكرار مشاريعهم لجعل قاعدة التعليمات البرمجية تجمع القرص الأحمر من موقع جديد وتسقطه في منطقة فرز جديدة. سوف يحتاجون إلى تغيير المعلمات في مشاريعهم حتى يتمكن Code Base من جمع القرص وفرزه بنجاح.
- أظهر للطلاب إعداد الحقل الجديد وقدم لهم مسافات القيادة حتى يتمكنوا من التركيز على الكود لهذا المشروع. سوف تحتاج قاعدة التعليمات البرمجية إلى دفع ملليمتر (~8 بوصات) لجمع القرص، و350 ملليمتر (~14 بوصة (بوصة)) إلى منطقة الفرز الجديدة.
تشغيل الجزء 2 إعداد الحقل - يوضح الرسم المتحرك التالي إحدى الطرق المحتملة التي يمكن أن تتحرك بها قاعدة التعليمات البرمجية لإكمال التحدي.
ملف الفيديو - نموذجنموذج للطلاب حول كيفية البدء في مشاريعهم في VEXcode GO.
- إذا لزم الأمر، أظهر للطلاب كيفية توصيل الدماغ على قاعدة التعليمات البرمجية الخاصة بهم بجهازهم في VEXcode GO. لأن خطوات الاتصال تختلف بين الأجهزة, انظر Connecting articles of the VEXcode GO VEX Library للحصول على خطوات محددة لتوصيل VEX GO Brain بالكمبيوتر أو الجهاز اللوحي.
- If necessary, model the steps from the Configure a Code Base مقالة مكتبة VEX and ensure students can انظر Drivetrain blocks in the Toolbox.
- اطلب من الطلاب تسمية مشروعهم بـ فرز أحمر 2 وحفظه على أجهزتهم. انظر قسم الفتح والحفظ في مكتبة VEXcode GO VEX للحصول على خطوات خاصة بالجهاز لحفظ مشروع VEXcode GO.
إذا لزم الأمر، قم بعمل نموذج للطلاب حول كيفية اختبار مشروعهم على أرض الواقع.
- أظهر لهم كيفية الإعداد للاختبار عن طريق وضع قاعدة التعليمات البرمجية في قاعدة المريخ.
تم الإعداد للاختبار - بمجرد وضع قاعدة التعليمات البرمجية في مكانها، حدد "ابدأ" في VEXcode GO لاختبار المشروع. ثم قم بمراقبة سلوكيات قاعدة التعليمات البرمجية.
- سيتعين على الطلاب تحديد زر "إيقاف" في شريط أدوات VEXcode GO لإيقاف المشروع بعد اكتمال التحدي.
إذا أنهى الطلاب أعمالهم مبكرًا، اطلب منهم تغيير موقع منطقة الفرز. اطلب منهم تحريكه مربعًا واحدًا أقرب إلى قاعدة المريخ.
- المسافة التقريبية لمنطقة الفرز هذه هي 250 مليمترًا (مم) (~10 بوصات (بوصة)). هل يمكنهم برمجة الروبوت الخاص بهم لجمع القرص وتسليمه إلى نفس منطقة الفرز؟
- تسهيلتسهيل المحادثة مع الطلاب أثناء قيامهم ببناء مشاريعهم واختبارها من خلال أسئلة مثل:
- كيف يجب أن تتحرك قاعدة التعليمات البرمجية لجمع القرص؟ هل يمكنك أن تظهر لي بيديك؟
- ما الذي يجب عليك تغييره حتى يتمكن Code Base الخاص بك من جمع القرص من الموقع الجديد؟
- ما هي المعلمات التي يجب عليك تغييرها حتى يقوم Code Base بإسقاط القرص في منطقة الفرز الجديدة؟
قم بإعداد الطلاب للمحاولة والخطأ الذي يعتبر جزءًا لا يتجزأ من التجربة التي سيشاركون فيها بهذا التحدي. قد ترغب في استخدام رسم دورة حل المشكلات من صفحة الخلفية كمساعد بصري لإنشاء هيكل لعملية حل المشكلات مع طلابك. انظر Background for more information for strategies to help students troubleshoot their projects and come up with their own solutions.
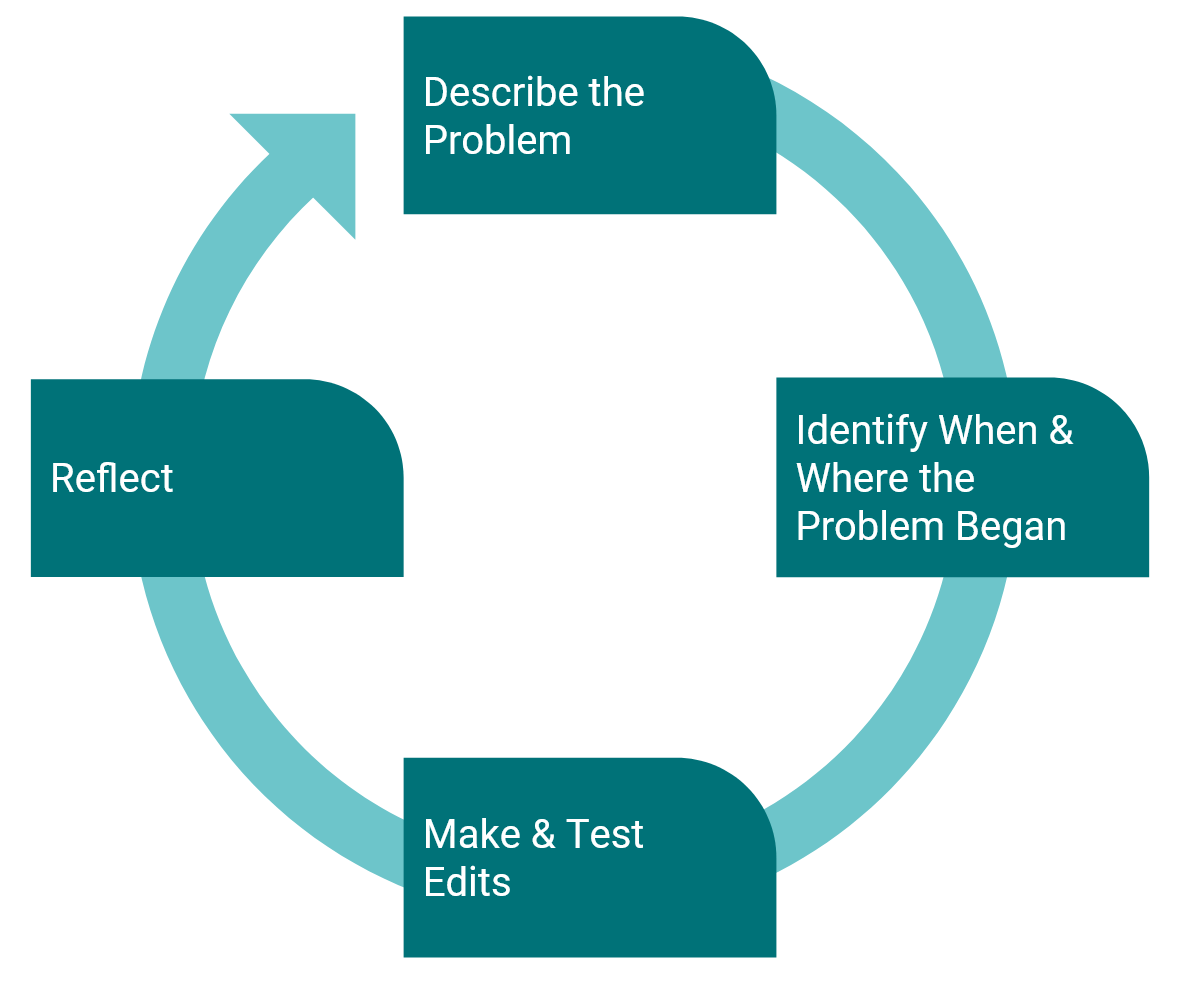
دورة حل المشكلات للطلاب هناك العديد من الحلول الممكنة لهذا التحدي. وفيما يلي مثال واحد.

العب الجزء 2 الحل المحتمل ركز على المفهوم، وليس على الدقة. الهدف من هذا المختبر هو التركيز على مفهوم استخدام مستشعر العين مع المغناطيس الكهربائي في المشروع. إذا قام الطلاب بمحاذاة قاعدة التعليمات البرمجية الخاصة بهم بشكل غير صحيح قليلاً، أو لم يكن القرص في المكان الصحيح تمامًا عند القيادة نحوه، فأخبرهم أنه من الجيد تحريك القرص قليلاً للتأكد من التقاطه بواسطة المغناطيس الكهربائي.
إذا احتاج الطلاب إلى دعم إضافي لربط سلوكيات قاعدة التعليمات البرمجية بأوامر الكتل في مشروعهم، فاستخدم ميزة Project Stepping لمساعدة الطلاب على تنفيذ مشروعهم كتلة واحدة في كل مرة لمعرفة كيفية تنفيذ كل كتلة في مشروعهم. لمزيد من المعلومات حول كيفية استخدام ميزة Project Stepping، راجع البرنامج التعليمي Stepping Through Blocks في VEXcode GO.
 برنامج تعليمي
برنامج تعليمي Through Blocks في VEXcode GO - تذكيرذكّر الطلاب بالتحقق من ترتيب (أو تسلسل) الكتل والمعلمات التي تم تعيين كل كتلة عليها في مشاريعهم قبل اختبارها في الميدان.
- هل اتجهت قاعدة التعليمات البرمجية إلى اليمين بدلاً من اليسار؟ ما الذي يمكنك تغييره لجعل الروبوت يتحرك في الاتجاه الصحيح؟
- هل كان القرص أبعد؟ كيف يمكنك تغيير المعلمة في كتلة [Drive for] للعثور على المسافة الصحيحة التي يجب أن تقطعها قاعدة التعليمات البرمجية؟
- هل تم تعيين الكتلة <Detects color> على اللون الأحمر (لون القرص)؟
تحدث مع الطلاب حول حل المشكلات التي تواجههم أثناء تجولك في الفصل الدراسي. ستكون هذه عملية تكرارية، لذا ذكّر الطلاب بأن العلماء الذين يقومون ببرمجة مركبات المريخ يجب عليهم أيضًا المحاولة عدة مرات لجعل المركبة تتحرك بالطريقة المقصودة.
- اسألاطلب من الطلاب أن يفكروا في كيفية تغير مشروعهم من الجزء الأول إلى الجزء الثاني.
- كيف تغير مشروعك منذ بداية المختبر حتى الآن؟
- ما الذي قمت بتغييره في مشروعك لجعله يعمل بشكل أفضل؟
- ما هو التغيير الذي قمت به والذي جعله أقل نجاحا؟ كيف تم إصلاحه؟