
Toneelstuk
Deel 1 - Stap voor stap
- InstructieGeef de leerlingen de opdracht om voort te bouwen op wat ze in Lab 1 hebben geleerd. Ze gaan de Code Base een Mars-rotsmonster (de rode schijf) laten verzamelen en terugbrengen. Maar nu gaan ze hun robot programmeren om gegevens van oogsensoren te gebruiken om een schijf te sorteren op basis van de kleur.
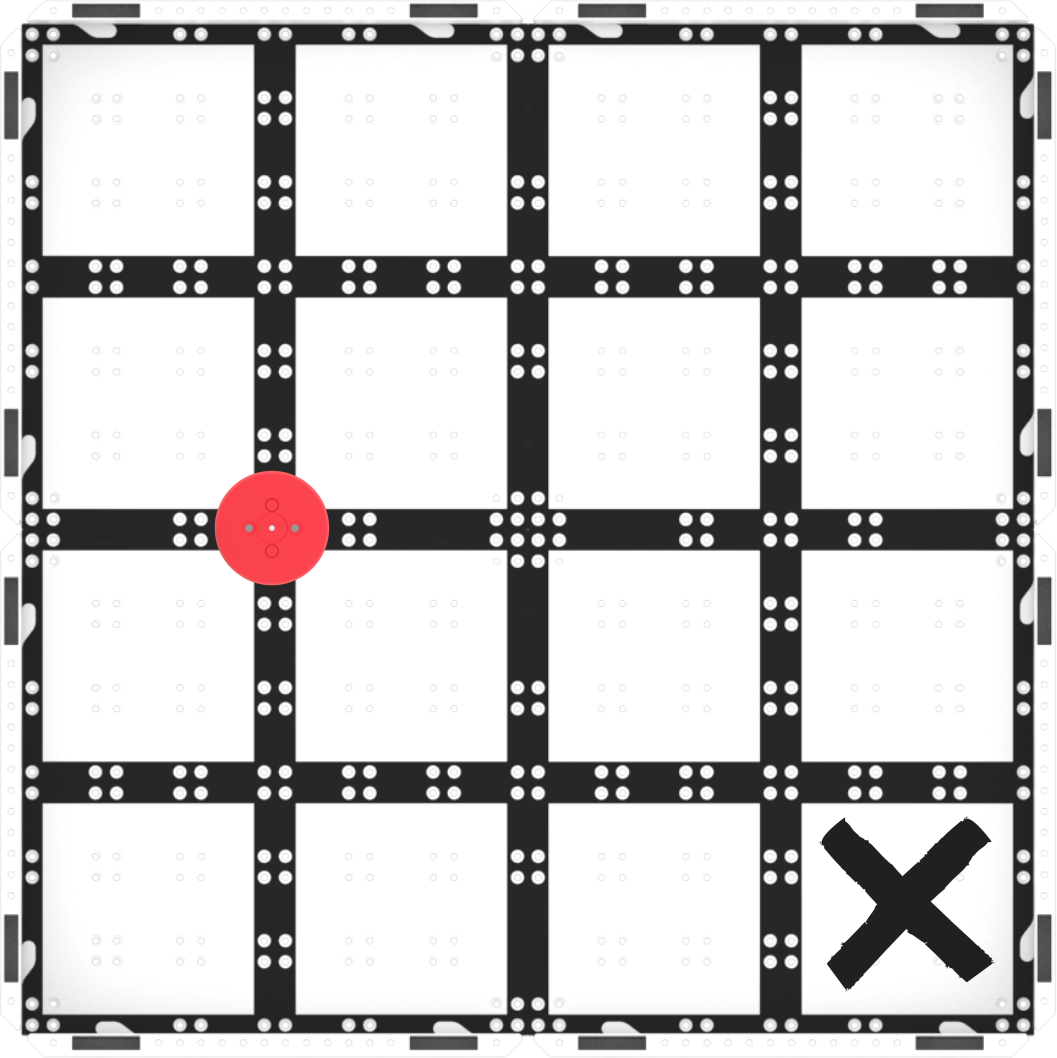
- Laat de leerlingen de veldopstelling zien met het sorteergebied gemarkeerd met de X. Zodra de Code Base de rode schijf heeft verzameld, moet deze in het vierkant met de X worden geplaatst.

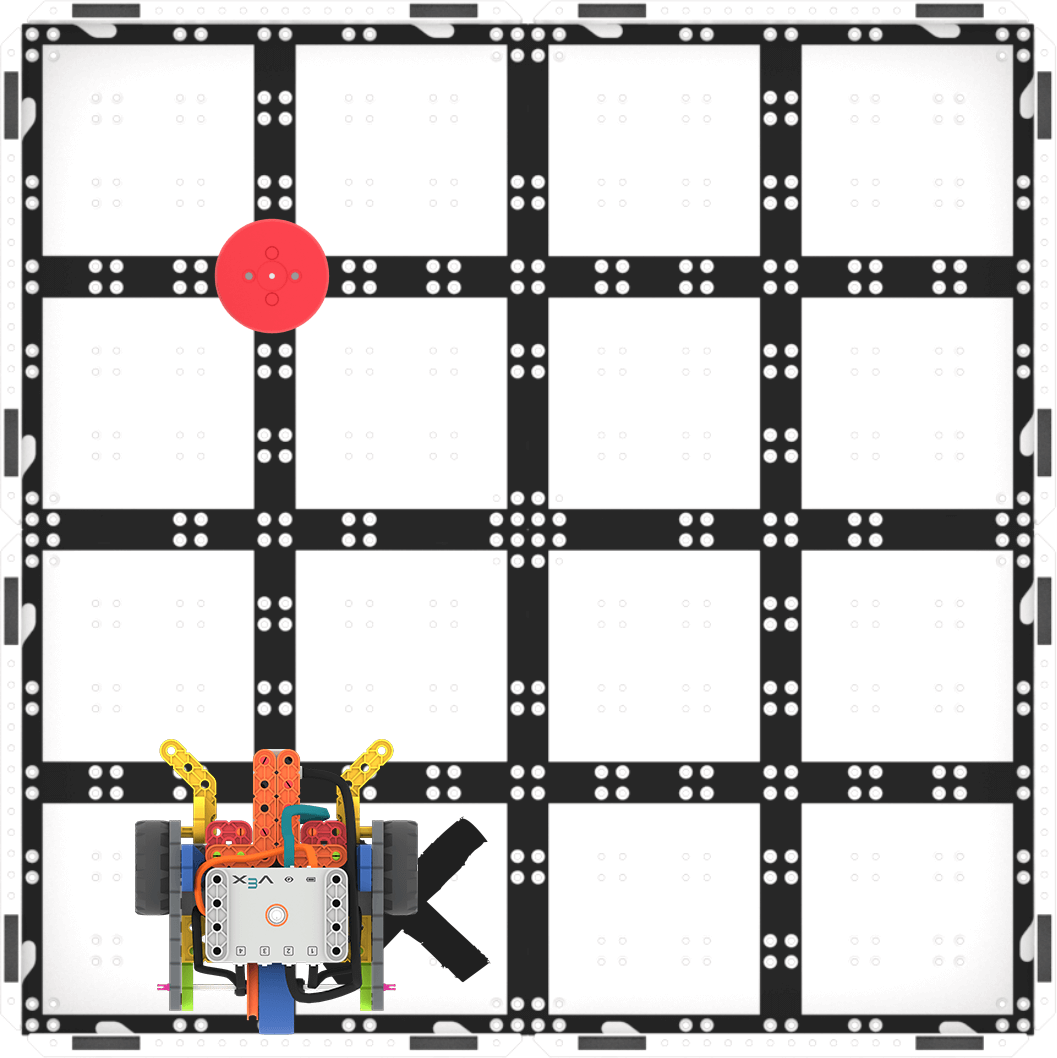
Veldinstelling - Studenten bouwen samen met jou een project en testen dit vervolgens op het oppervlak van Mars (het Veld). De onderstaande animatie laat zien hoe de Code Base zich verplaatst wanneer dit project wordt gestart. De robot rijdt eerst vooruit totdat hij de rode schijf bereikt en gebruikt dan zijn elektromagneet om de schijf op te pakken. Vervolgens draait de robot zich om en rijdt terug naar de startpositie. Vervolgens draait hij 90 graden naar links en rijdt vooruit om het sorteergebied te bereiken dat met een X is gemarkeerd. Zodra de X is bereikt, laat de robot de schijf vallen, draait zich om en rijdt terug naar de startpositie.
Videobestand - ModelModel voor studenten hoe ze het project in VEXcode GO kunnen bouwen en hun projecten op het veld kunnen testen.
- Begin met leerlingen te laten zien hoe ze de hersenen op hun codebasis kunnen verbinden met hun apparaat in VEXcode GO. Omdat verbindingsstappen variëren tussen apparaten, zie de Verbindingsartikelen van de VEXcode GO VEX-bibliotheek voor specifieke stappen om de VEX GO Brain aan te sluiten op uw computer of tablet.
- Ze moeten ook VEXCode GO configureren voor de codebasis. Modelleer indien nodig de stappen uit het artikel Configure a Code Base VEX Library en zorg ervoor dat studenten de Drivetrain-blokken in de Toolbox kunnen zien.
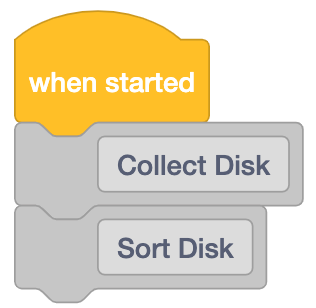
- Zodra de Code Base is geconfigureerd, laten de studenten de volgende [Commentaar]-blokken toevoegen om hun projecten te plannen en organiseren. De blokken onder het blok "Schijf verzamelen" [Opmerking] zullen de codebasis aansturen om de schijf te verzamelen en terug te keren naar de Marsbasis. De blokken onder het blok "Sorteerschijf" [Opmerking] zullen de codebasis oogsensorgegevens laten gebruiken om de schijf naar het aangewezen sorteergebied te brengen - op basis van de schijfkleur.
 Project
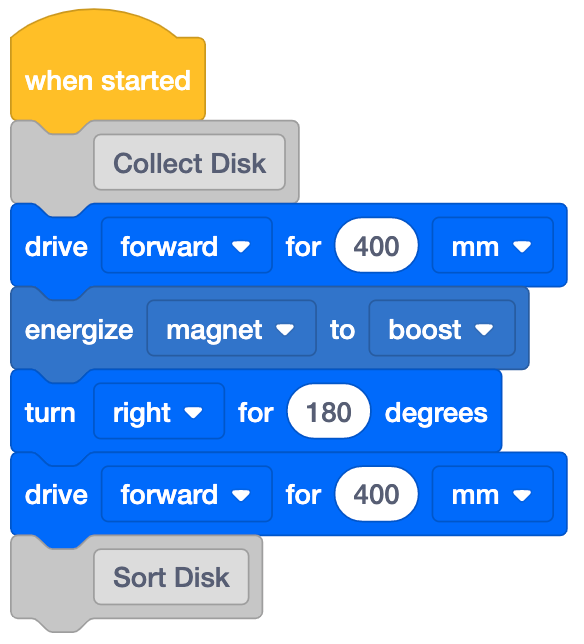
Project plannen met [Comment] blokken - Laat de leerlingen vervolgens de volgende blokken toevoegen onder het blok "Schijf verzamelen" [Opmerking] om de codebasisschijf te hebben om de rode schijf te verzamelen.
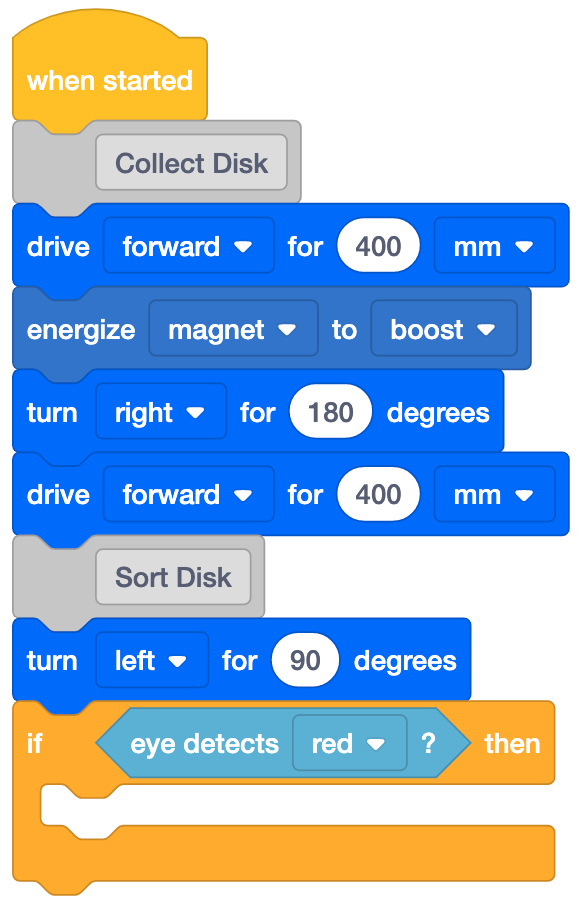
Schijfcode verzamelen - Voeg vervolgens samen toe aan het project om de codebasis de schijf te laten sorteren. Sleep een [Turn for] -blok naar de werkruimte en bevestig het onder het blok "Sort Disk" [Comment]. Wijzig de parameter naar 'links' om de codebasis naar het sorteergebied te laten draaien.

Voeg [Draai voor] toe en zet op links - Voeg een blok [If then] toe en plaats een <Detects color> blok in de zeshoek. Laat het <Detects color> blok op rood staan. Hierdoor zal de codebasis de oogsensor gebruiken om de kleur van de schijf te detecteren. Als deze schijf rood is, rapporteert het <Detects color> blok true en worden de blokken die aan de binnenkant van het ‘C‘ -blok worden toegevoegd, uitgevoerd.
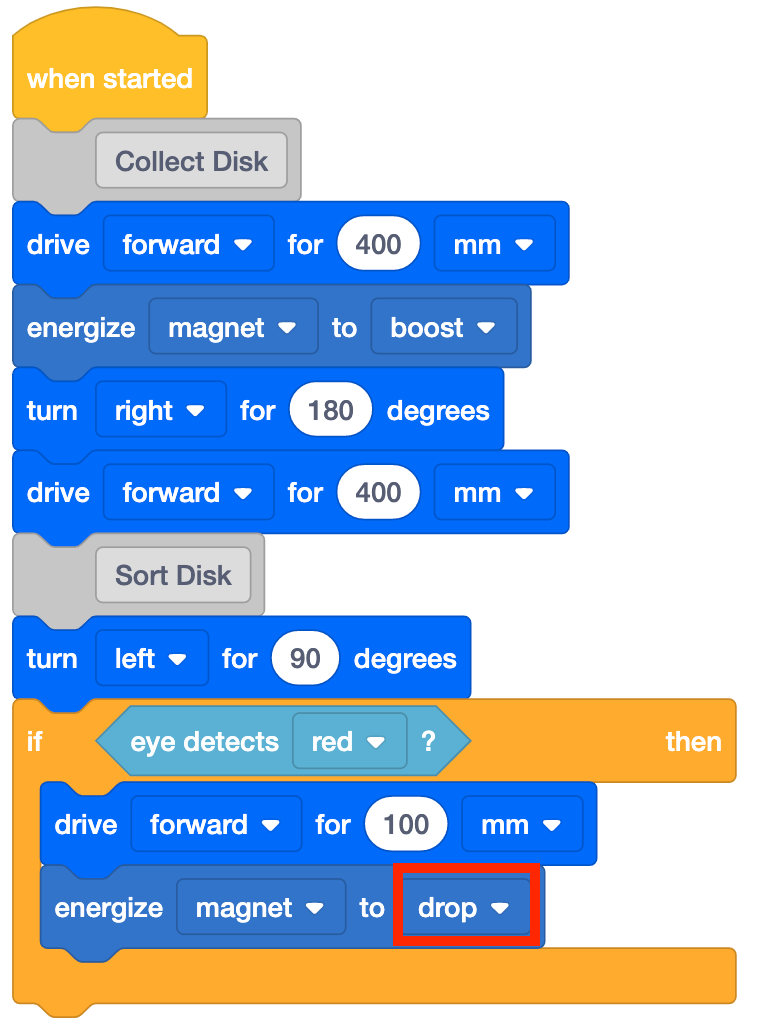
Voeg [Als dan] toe met <Detects color> - Voeg een [Drive for] en een [Energize electromagnet] toe binnen het [If then]-blok en stel [Energize electromagnet] in op 'drop'. Hiermee wordt de Code Base-schijf naar het sorteergebied gebracht en wordt de schijf neergezet.
Voeg [Drive for} en [Energize elektromagneet] toe die zijn ingesteld op 'drop' - Voeg een [Drive for] -blok toe en stel deze in op achteruit. Hierdoor keert de codebasis terug naar de Marsbasis nadat deze de schijf heeft laten vallen.

Voeg [Drive for] toe en stel in op achteruit - Voeg ten slotte een [Draai voor]-blok toe en zet het op 'links' zodat de codebasis terugkeert naar de startpositie, gericht op het verzamelgebied op het Marsoppervlak.

Voeg [Drive for] toe en stel in op achteruit - Laat leerlingen hun project een naam geven als Sorteer rood 1 en sla het op hun apparaat op. Zie het gedeelte Openen en opslaan van de VEXcode GO VEX-BIBLIOTHEEK voor apparaatspecifieke stappen om een VEXcode GO-project op te slaan.
Model voor studenten hoe ze hun project op het veld kunnen testen.
- Laat ze eerst zien hoe ze hun robot op het startpunt (de Mars-basis) en de rode schijf op het veld moeten plaatsen, zoals weergegeven in de onderstaande afbeelding. Gebruik de rasterlijnen op het veld om u te helpen bij de uitlijning. De schijf en de elektromagneet kunnen beide worden opgesteld op kruisende rasterlijnen van het veld, om het voor studenten gemakkelijker te maken om voorbereid te zijn op succes wanneer ze hun projecten testen.
Instellen om te testen - Zodra de codebasis op zijn plaats is, selecteert u 'Start' in VEXcode GO om het project te testen. Kijk hoe de Code Base de Rode Schijf ophaalt, terugkeert naar de basis en deze vervolgens aflevert bij het sorteergebied.

Selecteer 'Start' om het project te testen - Studenten moeten de knop 'Stop' in de VEXcode GO-werkbalk selecteren om het project te stoppen.
- Voor studenten die vroeg klaar zijn en extra uitdagingen nodig hebben, laat ze de Red Disk naar een andere locatie verplaatsen. Kunnen ze hun code aanpassen om de codebasis de schijf te laten verzamelen en deze naar hetzelfde sorteergebied te laten brengen?
- FaciliterenFaciliteren van een gesprek met studenten terwijl ze hun projecten testen.
- Hoe weet de codebasis wanneer de elektromagneet moet worden ingeschakeld?
- Welke blokken worden gebruikt om de codebasis de kleur van de schijf te laten detecteren?
- Wat zou er gebeuren als de Code Base geen rood detecteert?
Focus op het concept, niet op de precisie. Het doel van dit Lab is om te focussen op het concept van het gebruik van de Elektromagneet in een project. Als leerlingen hun robot iets verkeerd hebben uitgelijnd, of als de schijf niet precies op de juiste plek zit wanneer ze ernaartoe rijden, leg ze dan uit dat ze de schijf iets mogen verplaatsen zodat deze goed wordt opgepikt door de elektromagneet.
- Herinner studenten eraan om de parameters in de [Drive for] -blokken te controleren om ervoor te zorgen dat het project de juiste afstanden heeft die nodig zijn om de schijf te verzamelen en vervolgens te sorteren.
- Ze moeten ook controleren of de parameters in de [Turn for] -blokken zijn ingesteld om de codebasis op de juiste manier te laten draaien om terug te keren naar de Marsbasis en naar het sorteergebied.
Om een groeimindset te stimuleren en studenten te helpen de trial-and-error-mentaliteit die bij programmeren hoort te omarmen en van de fouten te leren, kunt u vragen stellen zoals:
- Welke fout heb je gemaakt die je iets heeft geleerd?
- Welk deel van het Lab is lastig of zet je aan het denken?
- VraagVraag studenten hoe de Perseverance Rover een oogsensor kan gebruiken om informatie te verzamelen en de verschillende rots- en grondmonsters van Mars te bestuderen. Wat zou de Perseverance Rover kunnen bestuderen met de oogsensor?
Mid-Play Break & Groepsdiscussie
Zodra elke groep hun project heeft getest om de codebasis de rode schijf te laten verzamelen en afleveren in het sorteergebied, komt u samen voor een kort gesprek.
Controleer de voortgang van studenten en praat over wat de Code Base doet in hun projecten.
- Hoe werkt de oogsensor in ons project? Welke blokkering(en) regelen de oogsensor?
- Hoe hebt u de elektromagneet in uw project laten werken met de oogsensor?
- Wat als we de locatie van de schijven wijzigen? Werkt dit project nog? Waarom wel of niet? Welke parameters zou je veranderen?
Deel 2 - Stap voor stap
- InstrueerInstrueer studenten dat ze het geleerde in Play Part 1 gaan toepassen om hun projecten te herhalen om de Code Base de Rode Schijf vanaf een nieuwe locatie te laten verzamelen en in een nieuw sorteergebied te laten vallen. Ze moeten de parameters in hun projecten wijzigen om de codebasis de schijf met succes te laten verzamelen en sorteren.
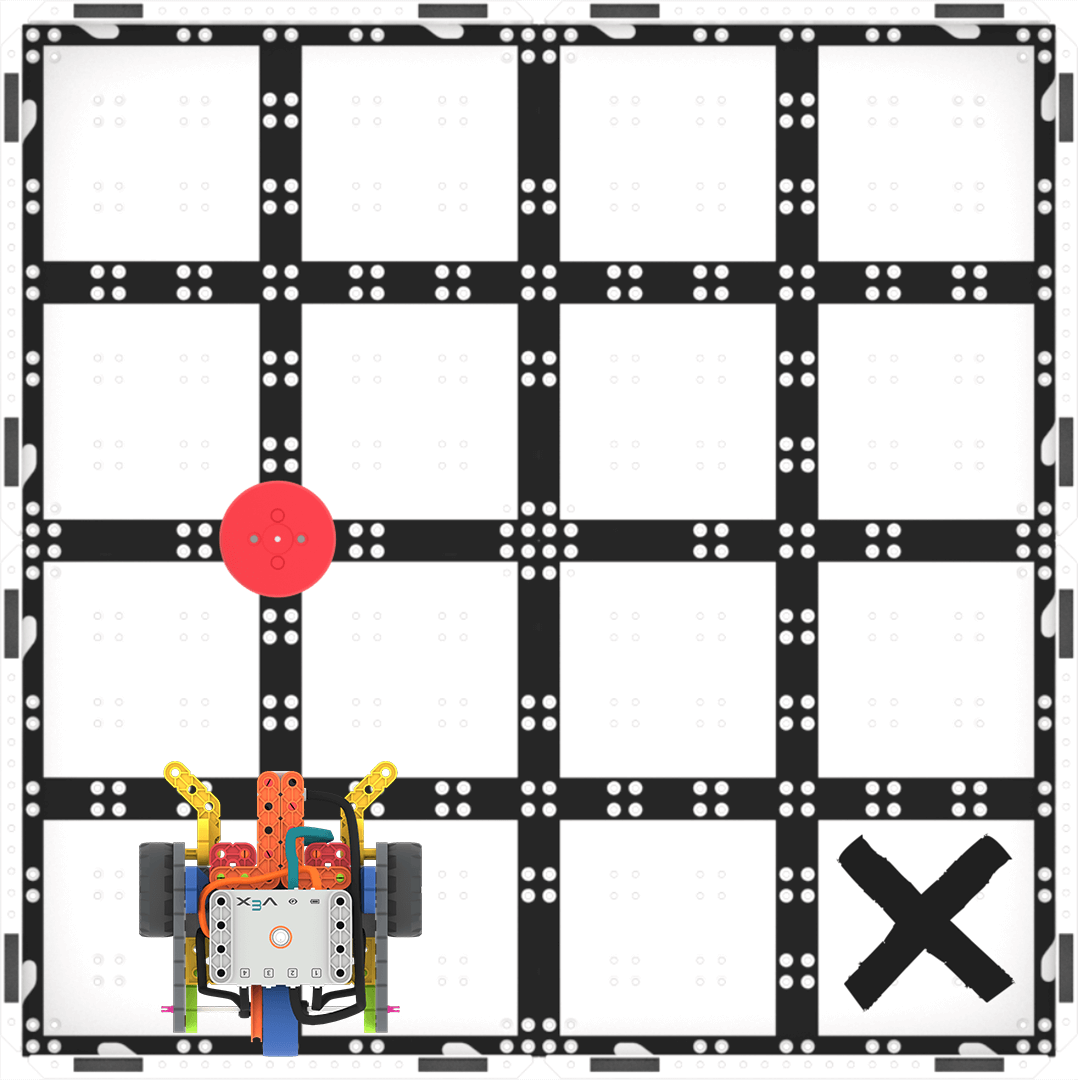
- Laat studenten de nieuwe veldconfiguratie zien en geef ze de rijafstanden zodat ze zich kunnen concentreren op de code voor dit project. De codebasis moet 200 millimeter (~8 inch) rijden om de schijf op te halen en 350 millimeter (mm) (~14 inch (in)) naar het nieuwe sorteergebied.
Afspelen Deel 2 Veldinstelling - De onderstaande animatie laat een mogelijke manier zien waarop de Code Base kan bewegen om de uitdaging te voltooien. De robot rijdt eerst vooruit totdat hij de rode schijf bereikt en gebruikt dan zijn elektromagneet om de schijf op te pakken. Vervolgens draait de robot zich om en rijdt terug naar de startpositie. Vervolgens draait hij 90 graden naar links en rijdt vooruit om het sorteergebied te bereiken dat met een X is gemarkeerd. Zodra de X is bereikt, laat de robot de schijf vallen, draait zich om en rijdt terug naar de startpositie.
Videobestand - ModelModel voor studenten hoe ze aan de slag kunnen met hun projecten in VEXcode GO.
- Laat studenten indien nodig zien hoe ze de hersenen op hun codebasis kunnen verbinden met hun apparaat in VEXcode GO. Omdat verbindingsstappen variëren tussen apparaten, zie de Verbindingsartikelen van de VEXcode GO VEX-bibliotheek voor specifieke stappen om de VEX GO Brain aan te sluiten op uw computer of tablet.
- Modelleer indien nodig de stappen uit het artikel Configure a Code Base VEX Library en zorg ervoor dat studenten de Drivetrain-blokken in de Toolbox kunnen zien.
- Laat leerlingen hun project een naam geven als Sorteer rood 2 en sla het op hun apparaat op. Zie het gedeelte Openen en opslaan van de VEXcode GO VEX-BIBLIOTHEEK voor apparaatspecifieke stappen om een VEXcode GO-project op te slaan.
Modelleer indien nodig voor studenten hoe ze hun project op het veld kunnen testen.
- Laat ze zien hoe ze zich kunnen instellen om te testen door de codebasis op de Marsbasis te plaatsen.
Instellen om te testen - Zodra de codebasis op zijn plaats is, selecteert u 'Start' in VEXcode GO om het project te testen. Observeer vervolgens het gedrag van de codebasis.
- Studenten moeten de knop 'Stoppen' in de VEXcode GO-werkbalk selecteren om het project te stoppen nadat het de uitdaging heeft voltooid.
Als studenten vroeg klaar zijn, laat ze dan de locatie van het sorteergebied wijzigen. Laat ze het een vierkant dichter bij de Marsbasis verplaatsen.
- De geschatte afstand voor dit sorteergebied is 250 millimeter (mm) (~10 inch (in)). Kunnen ze hun robot coderen om de schijf op te halen en naar hetzelfde sorteergebied te brengen?
- FaciliterenFaciliteren van een gesprek met studenten terwijl ze hun projecten opbouwen en testen met vragen als:
- Hoe moet de codebasis worden verplaatst om de schijf te verzamelen? Kun je het me met je handen laten zien?
- Wat moet u wijzigen om uw codebasis de schijf van de nieuwe locatie te laten ophalen?
- Welke parameters moet u wijzigen om de codebasis de schijf bij het nieuwe sorteergebied te laten laten vallen?
Bereid studenten voor op het vallen en opstaan dat een intrinsiek onderdeel is van het experiment dat ze met deze uitdaging zullen aangaan. Misschien wil je de probleemoplossende cyclusgrafiek van de achtergrondpagina gebruiken als visuele hulp om een structuur op te zetten voor het probleemoplossingsproces met je studenten. Zie de Achtergrond voor meer informatieover strategieën om studenten te helpen bij het oplossen van problemen in hun projecten en het bedenken van hun eigen oplossingen.
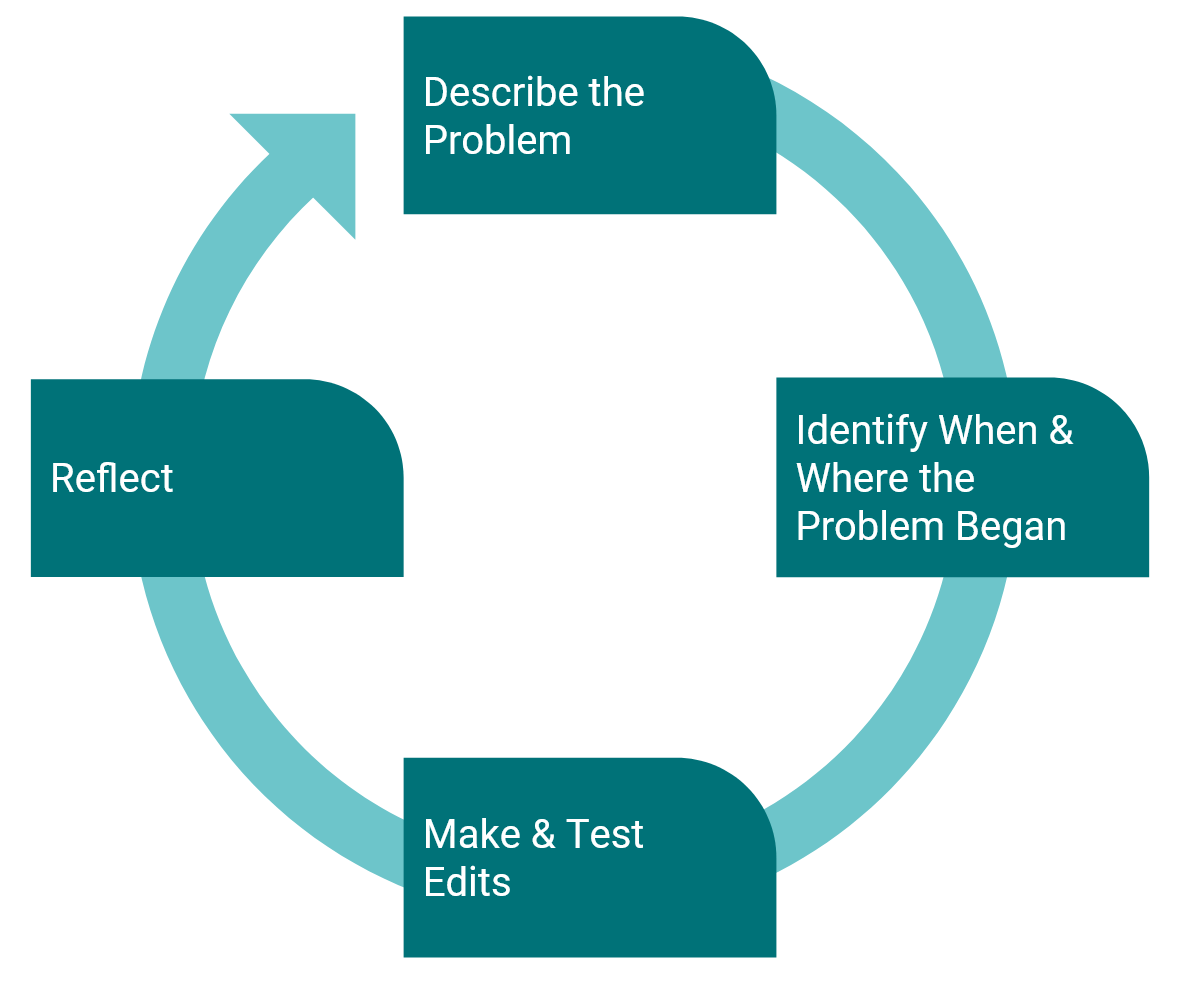
Probleemoplossingscyclus voor studenten Er zijn veel mogelijke oplossingen voor deze uitdaging. Het volgende is een voorbeeld.

Speel Deel 2 Mogelijke oplossing Focus op het concept, niet op de precisie. Het doel van dit lab is om de nadruk te leggen op het concept van het gebruik van de oogsensor met de elektromagneet in een project. Als studenten hun codebasis enigszins verkeerd uitlijnen, of als de schijf niet precies op de juiste plaats staat wanneer ze er naartoe rijden, laat ze dan weten dat het goed is om de schijf een beetje te verplaatsen om ervoor te zorgen dat deze door de elektromagneet wordt opgepikt.
Als studenten extra ondersteuning nodig hebben om het gedrag van de codebasis te verbinden met de blokcommando's in hun project, gebruik dan de Project Stepping-functie om studenten te helpen hun project blok voor blok te doorlopen om te zien hoe elk blok in hun project wordt uitgevoerd. Voor meer informatie over het gebruik van de Project Stepping functie, bekijk de Stepping Through Blocks tutorial in VEXcode GO.
 Zelfstudie
Zelfstudie Through Blocks in VEXcode GO - Herinner studenten eraan om de volgorde (of volgorde) van de blokken te controleren, en de parameters waarop elk blok is ingesteld in hun projecten voordat ze op het veld testen.
- Is de codebasis naar rechts gedraaid in plaats van naar links? Wat kun je veranderen om de robot de juiste kant op te laten draaien?
- Was de schijf verder weg? Hoe kunt u de parameter in het blok [Drive for] wijzigen om de juiste afstand te vinden die de codebasis moet afleggen?
- Is het <Detects color> blok ingesteld op Rood (de kleur van de schijf)?
Praat met studenten over het oplossen van elk probleem terwijl je door het klaslokaal loopt. Dit zal een iteratief proces zijn, dus herinner studenten eraan dat wetenschappers die de Mars-rovers coderen, ook meerdere keren moeten proberen om de rover te laten bewegen zoals ze van plan waren.
- VraagVraag studenten om na te denken over hoe hun project is veranderd van Play Part 1 naar Play Part 2.
- Hoe is uw project veranderd vanaf het begin van het lab tot nu?
- Wat heb je in je project veranderd om het beter te laten werken?
- Welke verandering heb je aangebracht waardoor het minder succesvol is geworden? Hoe heb je het opgelost?