
अभ्यास
सीखें अनुभाग में, आपने पथ नियोजन और ड्राइवट्रेन को कोड करने के बारे में सीखा, जिसमें वेग को समायोजित करना और मोड़ों के लिए कोण मापना शामिल है। अब, आप क्यूब स्वीपर अभ्यास गतिविधि को पूरा करने के लिए अपने बेसबॉट को कोड करने के लिए जो कुछ भी सीखा है उसे लागू करने जा रहे हैं।
इस गतिविधि में, आप अपने रोबोट को दोनों IQ क्यूब्स को मैदान से पूरी तरह बाहर धकेलने के लिए कोड करेंगे। आप अपने प्रोजेक्ट पर पुनरावृत्ति करेंगे ताकि आपका रोबोट फील्ड को साफ़ कर सके और दोनों क्यूब्स को हटा सके। नीचे दिए गए वीडियो को देखें कि आपने जो सीखा है उसे क्यूब स्वीपर अभ्यास गतिविधि को पूरा करने के लिए कैसे लागू कर सकते हैं।
अब क्यूब स्वीपर अभ्यास गतिविधि को पूरा करने की आपकी बारी है!
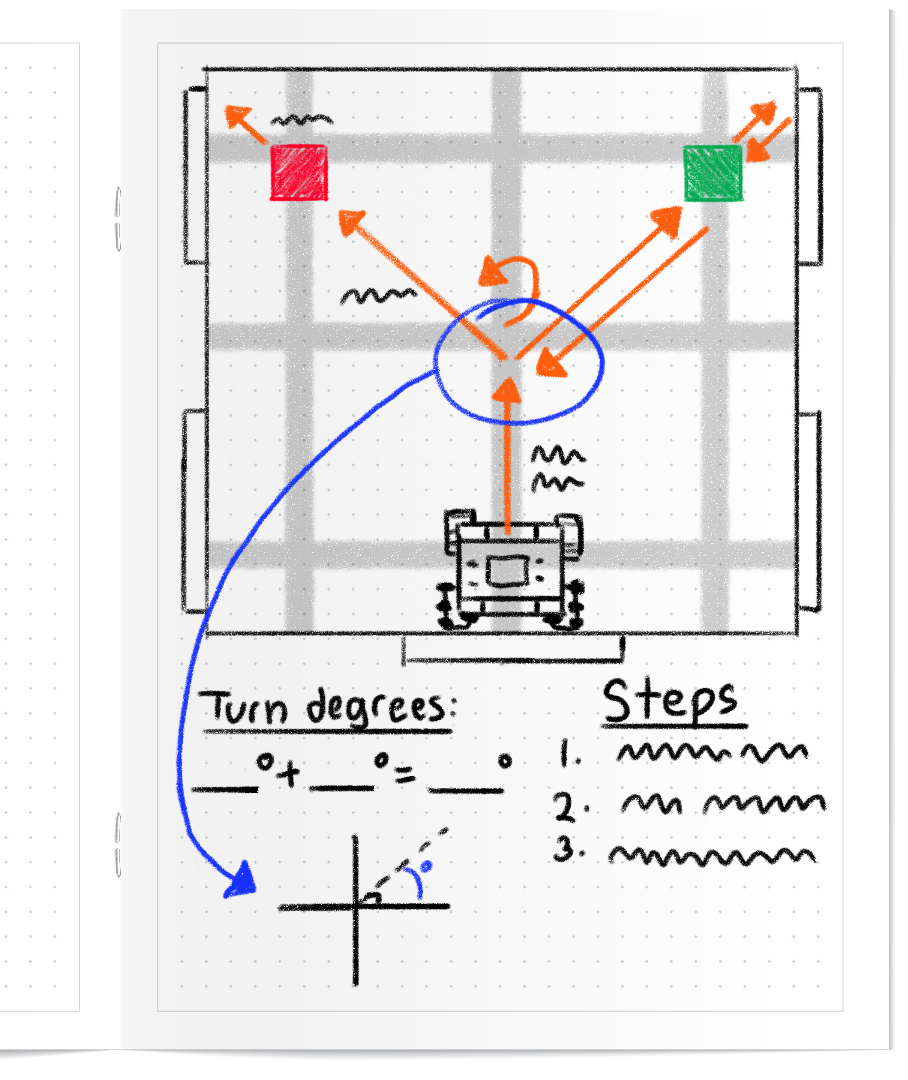
यह एनीमेशन एक संभावित तरीका दिखाता है जिससे आपका रोबोट दोनों क्यूब्स को मैदान से बाहर धकेल कर क्यूब स्वीपर अभ्यास गतिविधि को पूरा कर सकता है। फ़ील्ड के ऊपरी दाएँ कोने में एक हरा घन और ऊपरी बाएँ कोने में एक लाल घन है। बेसबोट मैदान के मध्य भाग से शुरू होता है, केंद्र की ओर आगे बढ़ता है, हरे क्यूब की ओर मुड़ता है, और उसे धक्का देता है। इसके बाद यह पीछे की ओर मुड़कर केंद्र की ओर आती है, लाल घन की ओर मुड़ती है, आगे बढ़ती है, और उसे धक्का दे देती है।
अभ्यास गतिविधि को पूरा करने के लिए इस दस्तावेज़ को संदर्भ के रूप में उपयोग करें।
जैसे ही आप क्यूब स्वीपर अभ्यास गतिविधि पूरी कर लें, अपने रोबोट पथ और परीक्षण परिणामों को अपनी इंजीनियरिंग नोटबुक में दर्ज करें।
- अपने रोबोट के लिए पथ का वर्णन और चित्रण करें।
- आपके रोबोट को पहले घन की ओर मुंह करने के लिए कितनी दूर तक मुड़ना होगा? दूसरा? आपको क्या माप लेने की आवश्यकता थी?
- आपने अपनी परियोजना में सबसे पहले क्या परिवर्तन किया? क्यों?
अपने डिजाइन विचारों और परीक्षणों को कैसे रिकॉर्ड कर सकते हैं, इसके उदाहरण के लिए बाईं ओर की छवि देखें।
चुनौती के लिए तैयार रहें
प्रतिस्पर्धा (अगले पृष्ठ पर) में, आप अपने रोबोट को मैदान से सभी 10 क्यूब्स को धकेलने के लिए कोड करेंगे। सबसे तेज समय, जीतता है। चुनौती में प्रतिस्पर्धा करना सीखें, अपनी समझ की जांच करें, फिर चुनौती के लिए अभ्यास करें।
बेसबॉट द्वारा मैदान से सभी 10 क्यूब्स को धकेलने का उदाहरण देखने के लिए इस एनीमेशन को देखें। एनीमेशन में, IQ बेसबोट मैदान के पीछे केंद्र में शुरू होता है, जिसमें ऊपरी दाएं में एक टाइमर और स्क्रीन के ऊपरी बाएं में एक स्कोर काउंटर होता है। 3 से उल्टी गिनती के बाद, बेसबोट पहले बायीं ओर मुड़ता है, नीचे बायीं ओर के महल को धकेलने के लिए आगे बढ़ता है, फिर पीछे मुड़ता है और मध्य तथा ऊपरी दाहिनी ओर के महल को धकेलने के लिए तिरछे चलता है। इसके बाद यह दाहिनी ओर मुड़ता है, नीचे के दाहिने महल को धकेलने के लिए आगे बढ़ता है, और अंत में पुनः दाहिनी ओर मुड़कर ऊपरी बाएं महल को मैदान से धकेल देता है। स्कोर 10 अंक तक पहुंच जाता है, और टाइमर लगभग 26 सेकंड दिखाता है।
इस चुनौती का लक्ष्य सबसे तेज समय में 10 IQ क्यूब्स को मैदान से बाहर धकेलना है।
यह एनीमेशन चुनौती को पूरा करने के लिए रोबोट द्वारा किए जाने वाले संभावित तरीके को दर्शाता है।
इस चुनौती को पूरा करने के तरीके के बारे में अधिक जानने के लिए इस दस्तावेज़ में दिए गए चरणों का पालन करें। Google / .docx / .pdf
अपनी समझ की जाँच करें
चुनौती शुरू करने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में प्रश्नों के उत्तर देकर चुनौती के नियमों और सेटअप को समझते हैं।
अपनी समझ की जाँच करें प्रश्न Google / .docx / .pdf
प्रश्नों को पूरा करने के बाद चुनौती का अभ्यास करें।
टावर ओवर चैलेंज में प्रतिस्पर्धा करने के लिए अगला > चुनें।