
練習する
「学習」セクションでは、速度の調整やターン角度の測定など、パスの計画とドライブトレインのコーディングについて学びました。 ここで、学んだ内容を適用して BaseBot をコーディングし、Cube Sweeter の練習アクティビティを完了します。
このアクティビティでは、両方の IQ キューブを完全にフィールドから押し出す にロボットをコード化します。 プロジェクトを反復して、ロボットがフィールドを掃除して両方のキューブを削除できるようにします。 以下のビデオを見て、学んだ内容を適用してキューブ スイーパーの練習アクティビティを完了する方法を確認してください。
今度は、キューブ スイーパー 練習アクティビティを完了する です。
このアニメーションは、両方のキューブをフィールドから押し出すことによって、ロボットがキューブ スイーパーの練習アクティビティを完了するために移動できる可能性のある 1 つの方法を示しています。
ビデオファイル
キューブ スイーパーの練習アクティビティを完了したら、ロボットのパスと テスト結果をエンジニアリング ノートに文書化します。
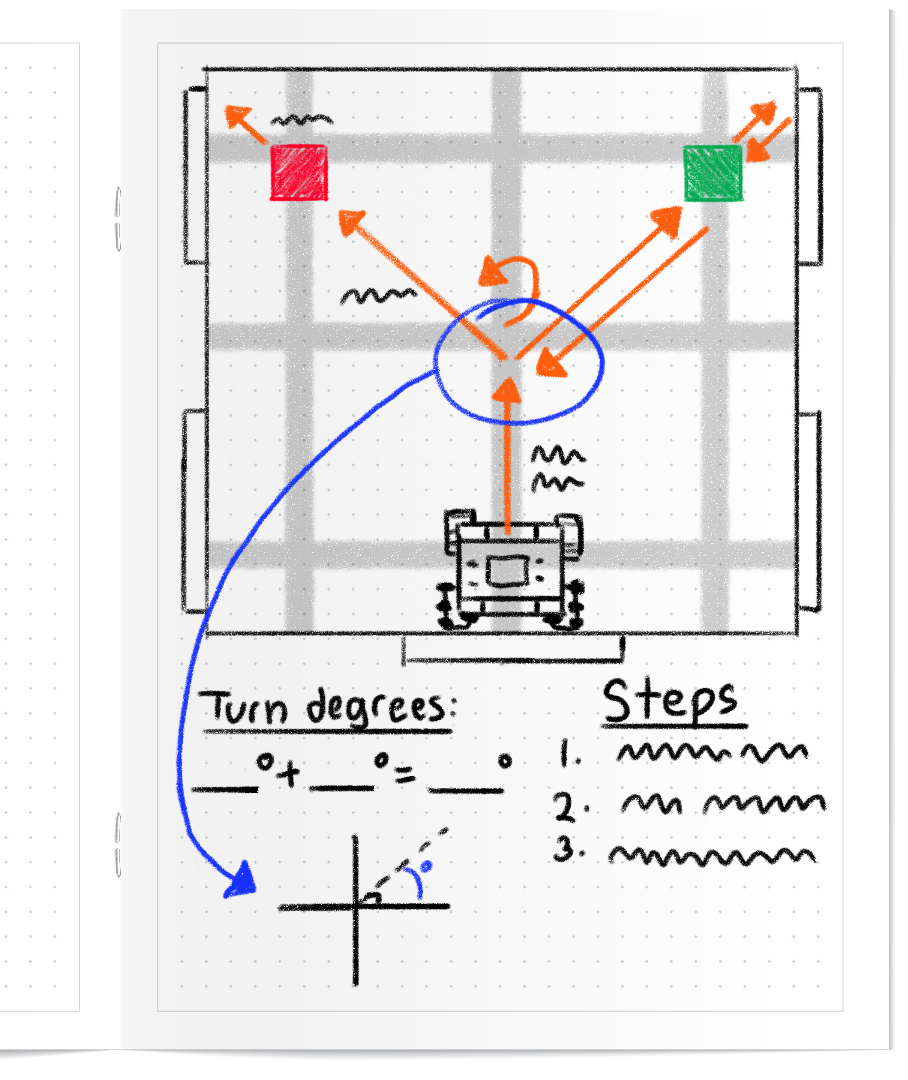
- ロボットの経路を説明し、図示します。
- ロボットは最初の立方体に向かうまでにどれくらい回転する必要がありますか? 二番目? どのような測定を行う必要がありましたか?
- プロジェクトで最初に変更したことは何ですか? なぜ?
設計のアイデアとテストを記録する方法の例については、左側の画像を参照してください。
チャレンジの準備をする
「競争」(次のページ) では、10 個のキューブすべてをフィールドから押し出すよう ロボットをコード化します。 最も速いタイムが勝ちです。 チャレンジで競争する方法を学び、理解を確認してから、チャレンジに向けて練習します。