
अभ्यास
पिछले अनुभाग में, आपने सीखा कि ऑप्टिकल सेंसर कैसे काम करता है और आप अपने रोबोट को निर्णय लेने के लिए अपने कोड में सेंसर से डेटा का उपयोग कैसे कर सकते हैं। अब, आप एक एल्गोरिथ्म बनाने और रोबोट स्वीप अभ्यास गतिविधि को पूरा करने के लिए जो कुछ भी सीखा है उसे लागू करने जा रहे हैं।
इस गतिविधि में, आपका रोबोट स्वचालित रूप से एक उठे हुए मैदान से दो क्यूब्स को धकेलेगा। नीचे दिए गए वीडियो को देखें कि आपने जो सीखा है उसे रोबोट स्वीप अभ्यास गतिविधि को पूरा करने के लिए कैसे लागू कर सकते हैं।
अब रोबोट स्वीप अभ्यास गतिविधि को पूरा करने की आपकी बारी है!
इस एनीमेशन में, बेसबॉट एक मैदान के बीच में शुरू होता है जिसके चारों ओर दो क्यूब्स बेतरतीब ढंग से रखे गए हैं। रोबोट पहले क्यूब को फील्ड से बाहर निकालने के लिए आगे बढ़ता है, फिर दूसरे क्यूब को फील्ड से बाहर निकालने के लिए आगे बढ़ता है। यह एक संभावित रास्ता है जिसे आपका रोबोट रोबोट स्वीप अभ्यास गतिविधि को पूरा करने के लिए अपना सकता है।
इस गतिविधि को पूरा करने के लिए इस दस्तावेज़ में दिए गए चरणों का पालन करें। Google / .docx / .pdf
जैसे ही आप रोबोट स्वीप अभ्यास गतिविधि पूरी कर लें, अपने निष्कर्षों को अपनी इंजीनियरिंग नोटबुक में दर्ज कर लें।
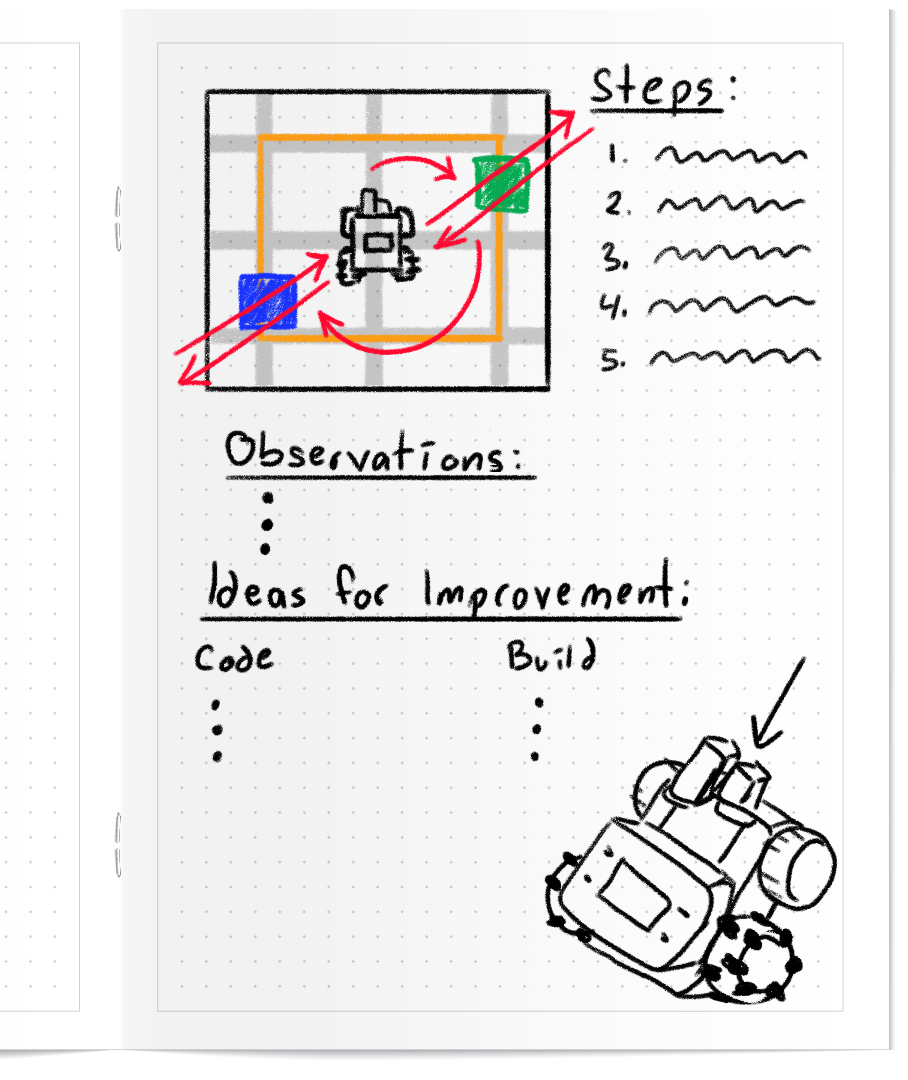
- शुरुआत से पहले, उन व्यवहारों की योजना बनाएं जिन्हें आप अपने रोबोट से पूरा करवाना चाहते हैं। इस बारे में सोचें कि ये चरण उस कोड से कैसे संबंधित हैं जिसे आप बनाना चाहते हैं।
- जब आप अपना प्रोजेक्ट चला रहे हों, तो ध्यान रखें कि रोबोट किस प्रकार चल रहा है।
- अपने कोड और रोबोट के निर्माण में सुधार के लिए विचारों की एक सूची बनाएं।
अपने परिणाम कैसे रिकॉर्ड करें, इसके उदाहरण के लिए इस चित्र को देखें।
चुनौती गतिविधि के लिए तैयारी करें
प्रतिस्पर्धा (अगले पृष्ठ पर) में, आप अपने रोबोट को एक उभरे हुए क्षेत्र से चार क्यूब्स को स्वचालित रूप से ढूंढने और हटाने के लिए कोड करेंगे। स्वीप द फील्ड चैलेंज में प्रतिस्पर्धा करने का तरीका जानने के लिए नीचे दिए गए दस्तावेज़ और एनीमेशन को देखें, अपनी समझ की जांच करें, फिर चुनौती के लिए अभ्यास करें।
चुनौती के सफल संचालन में आपका रोबोट किस प्रकार आगे बढ़ सकता है, इसका उदाहरण देखने के लिए नीचे दिए गए एनीमेशन को देखें। बेसबोट पहले क्यूब का पता लगाने के लिए आगे बढ़ता है, और उसे फील्ड से बाहर धकेल देता है। इसके बाद यह अगले घन का पता लगाने के लिए आगे बढ़ता है। इसके बाद एनीमेशन में समयबद्ध परीक्षण का अंत दिखाया जाता है, जब चौथे घन का पता लगाया जाता है और उसे मैदान से बाहर धकेल दिया जाता है।
इस चुनौती का लक्ष्य यह है कि आपका रोबोट स्वचालित रूप से एक उठे हुए मैदान से सबसे तेज समय में चार क्यूब्स ढूंढ़कर निकाल ले।
यह केवल एक संभावित रास्ता है जिसे आपका रोबोट स्वीप द फील्ड चैलेंज को पूरा करने के लिए अपना सकता है।
इस गतिविधि को पूरा करने के तरीके के बारे में अधिक जानने के लिए इस दस्तावेज़ में दिए गए चरणों का पालन करें। Google/. .docx. /. .पीडीएफ
अपनी समझ की जाँच करें
चुनौती शुरू करने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में प्रश्नों के उत्तर देकर चुनौती के नियमों और सेटअप को समझते हैं।
अपनी समझ की जाँच करें प्रश्न Google / .docx / .pdf
प्रश्नों को पूरा करने के बाद चुनौती का अभ्यास करें।
स्वीप द फील्ड चैलेंज में प्रतिस्पर्धा करने के लिए अगला > चुनें।