
Praktik
Pada bagian terakhir, Anda mempelajari cara kerja Sensor Optik dan cara menggunakan data dari sensor dalam kode Anda untuk membuat robot mengambil keputusan. Sekarang, Anda akan menerapkan apa yang telah Anda pelajari untuk membuat algoritma dan menyelesaikan aktivitas latihan Robot Sweep.
Dalam aktivitas ini, robot Anda akan secara otomatis menggerakkan dan mendorong dua kubus dari Lapangan yang ditinggikan. Tonton video di bawah ini untuk melihat bagaimana Anda dapat menerapkan apa yang telah Anda pelajari untuk menyelesaikan aktivitas latihan Robot Sweep.
Sekarang giliran Anda untuk menyelesaikan aktivitas latihan Robot Sweep!
Dalam animasi ini, BaseBot dimulai di tengah Lapangan dengan dua kubus ditempatkan secara acak di sekitarnya. Robot bergerak untuk mendeteksi dan mendorong kubus pertama keluar dari Lapangan, lalu bergerak untuk mendeteksi dan mendorong kubus kedua keluar dari Lapangan. Ini adalah salah satu kemungkinan jalur yang dapat diambil robot Anda untuk menyelesaikan aktivitas latihan Robot Sweep.
Ikuti langkah-langkah dalam dokumen ini untuk menyelesaikan aktivitas ini. Google / .docx / .pdf
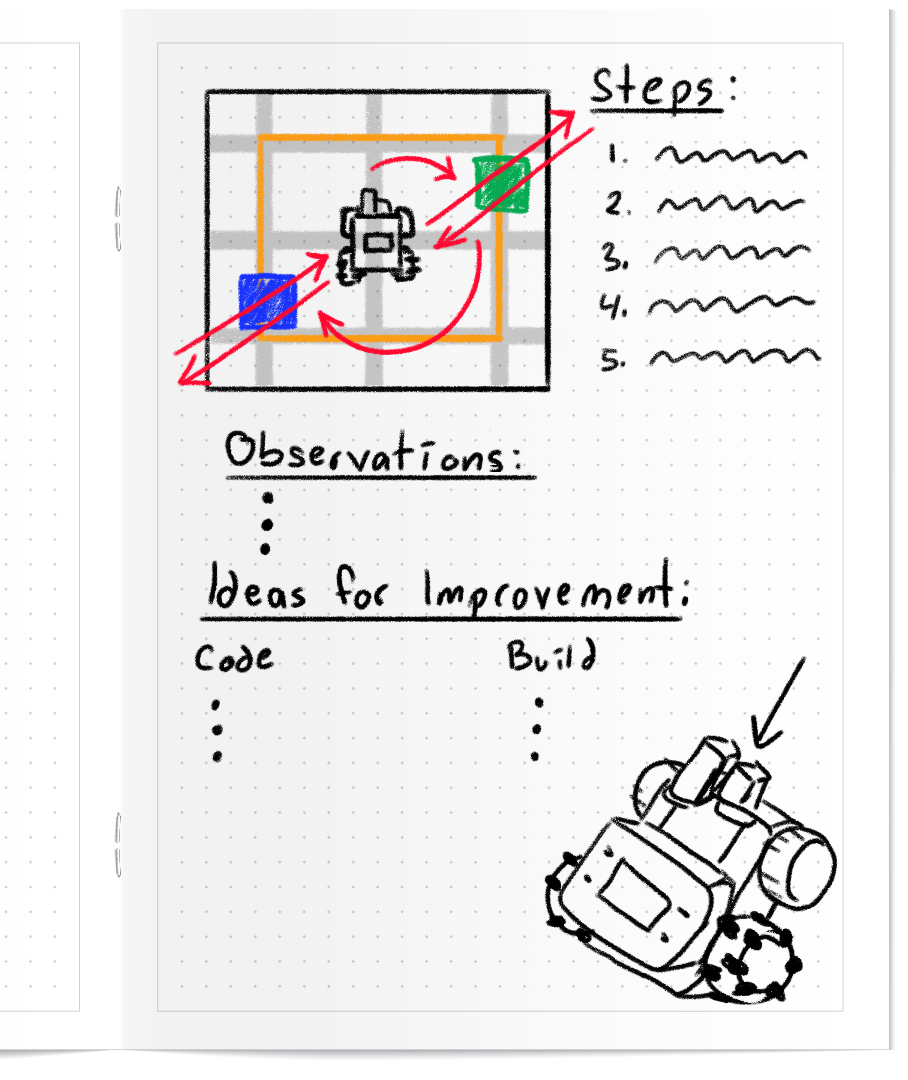
Saat Anda menyelesaikan aktivitas praktik Robot Sweep, dokumentasikan temuan Anda di buku catatan teknik Anda.
- Sebelum memulai, rencanakan perilaku yang Anda inginkan agar diselesaikan robot Anda. Pikirkan bagaimana langkah-langkah ini berhubungan dengan kode yang ingin Anda buat.
- Saat Anda menjalankan proyek, buatlah catatan tentang bagaimana robot bergerak.
- Buatlah daftar ide untuk perbaikan yang dapat dilakukan pada kode dan rancangan robot Anda.
Lihat gambar ini untuk contoh bagaimana Anda dapat merekam hasil Anda.
Persiapan untuk Aktivitas Tantangan
Dalam Compete (di halaman berikutnya), Anda akan mengkode robot Anda untuk secara mandiri menemukan dan menghapus empat kubus dari Lapangan yang ditinggikan. Lihatlah dokumen dan animasi di bawah ini untuk mempelajari cara berkompetisi dalam Tantangan Sapu Lapangan, periksa pemahaman Anda, lalu berlatihlah untuk tantangan tersebut.
Tonton animasi di bawah ini untuk melihat contoh bagaimana robot Anda dapat bergerak dalam tantangan yang berhasil. BaseBot bergerak untuk mendeteksi kubus pertama, dan mendorongnya keluar Lapangan. Kemudian bergerak untuk mendeteksi kubus berikutnya. Animasi kemudian menunjukkan akhir uji waktu saat kubus keempat terdeteksi dan didorong keluar Lapangan.
Sasaran tantangan ini adalah membuat robot Anda bergerak secara otonom untuk mencari dan mengeluarkan empat kubus dari Lapangan yang ditinggikan dalam waktu tercepat.
Ini hanyalah salah satu kemungkinan jalur yang dapat diambil robot Anda untuk menyelesaikan Tantangan Sapu Lapangan.
Ikuti langkah-langkah dalam dokumen ini untuk mempelajari lebih lanjut tentang cara menyelesaikan aktivitas ini. Google/. .docx. /. .pdf
Periksa Pemahaman Anda
Sebelum memulai tantangan, pastikan Anda memahami aturan dan pengaturan tantangan dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda Google / .docx / .pdf
Setelah menyelesaikan pertanyaan, cobalah berlatih tantangannya.
Pilih Berikutnya > untuk berkompetisi dalam Tantangan Sapu Lapangan.