
實踐
在上一節中,您了解了光學 感測器 的工作原理以及如何在程式碼中使用感測器 的資料讓機器人做出決策。 現在,您將應用所學知識來創建演算法並完成機器人掃地練習活動。
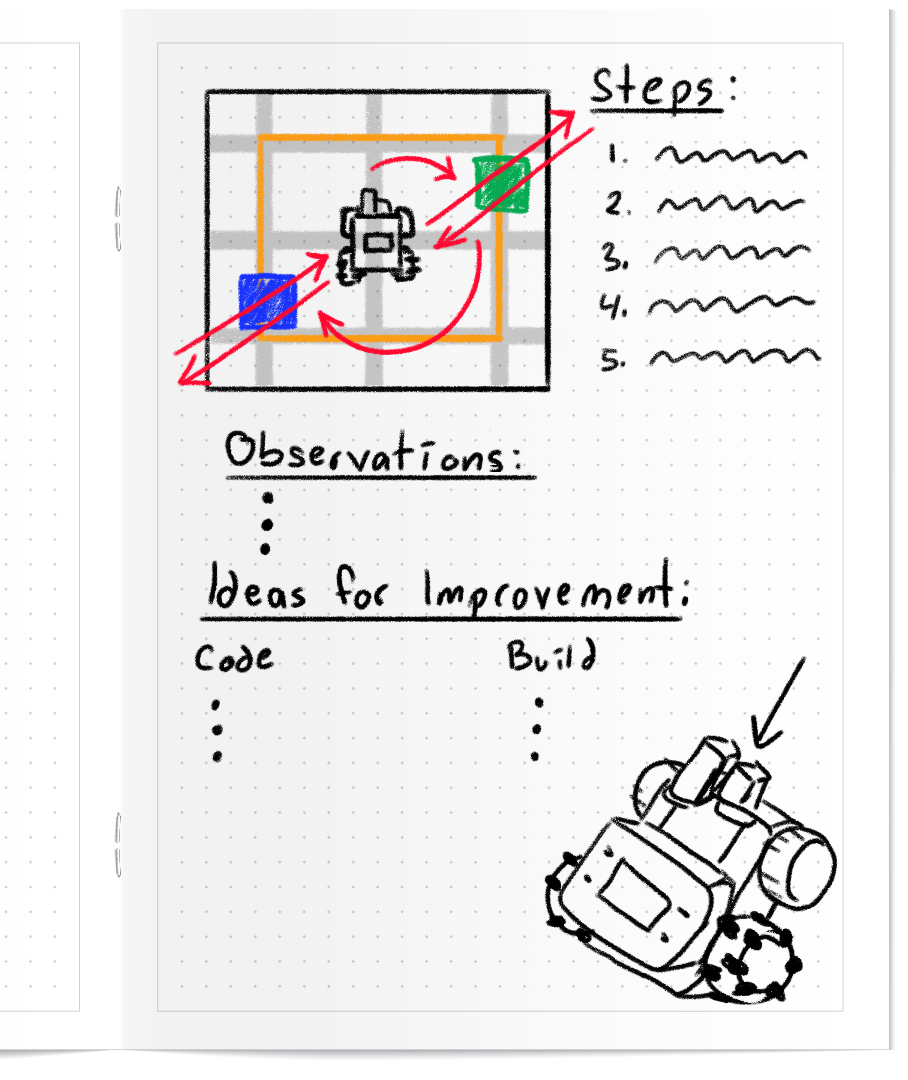
在此活動中,您的機器人將自動駕駛兩個立方體並將其推離凸起的場地。 觀看下面的視頻,了解如何運用所學知識來完成機器人掃地練習活動。
現在輪到您完成機器人掃地練習活動了!
準備挑戰活動
在「競賽」(下一頁)中,您將對機器人進行編碼,使其能夠自動找到並從凸起的場地中移除四個立方體。 請觀看下面的文件和動畫,了解如何參加掃地 挑戰賽, 檢視您的理解狀況,然後練習挑戰。