
实践
在上一节中,您了解了光学 传感器 的工作原理以及如何在代码中使用传感器 的数据让机器人做出决策。 现在,您将应用所学知识来创建算法并完成机器人扫地练习活动。
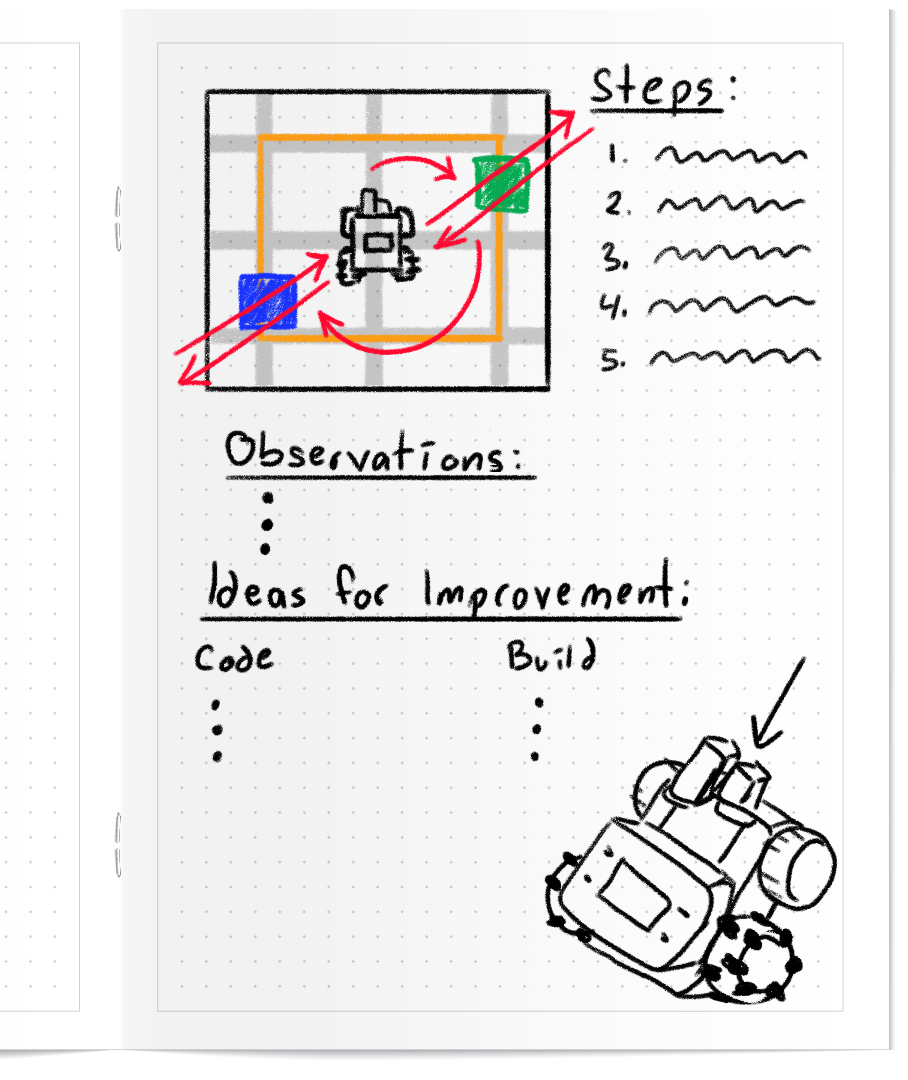
在此活动中,您的机器人将自动驾驶两个立方体并将其推离凸起的场地。 观看下面的视频,了解如何运用所学知识来完成机器人扫地练习活动。
现在轮到您完成机器人扫地练习活动了!
准备挑战活动
在“竞争”(下一页)中,您将对机器人进行编码,使其能够自动查找并从凸起的场地中移除四个立方体。 请观看下面的文档和动画,了解如何参加扫地 挑战赛, 检查您的理解情况,然后练习挑战。