
練習する
前のセクションでは、光学式 センサー がどのように機能するか、またコード内でセンサー からのデータを使用してロボットに意思決定をさせる方法を学びました。 ここで、学習した内容を適用してアルゴリズムを作成し、ロボット スイープの練習アクティビティを完了します。
このアクティビティでは、ロボットが自律的に運転し、盛り上がったフィールドから 2 つの立方体を押し出します。 以下のビデオを見て、ロボット スイープの練習アクティビティを完了するために学んだ内容をどのように適用できるかを確認してください。
次は、ロボット スイープの練習アクティビティを完了する番です。
このアニメーションでは、ロボットが自律走行して 2 つの立方体をフィールドから押し出します。 このアニメーションを見て、ロボット スイープの練習アクティビティを完了するためにロボットがたどる可能性のある 1 つのパスを確認してください。
ビデオファイル
ロボット スイープ の実践アクティビティを完了したら、結果をエンジニアリング ノートに文書化します。
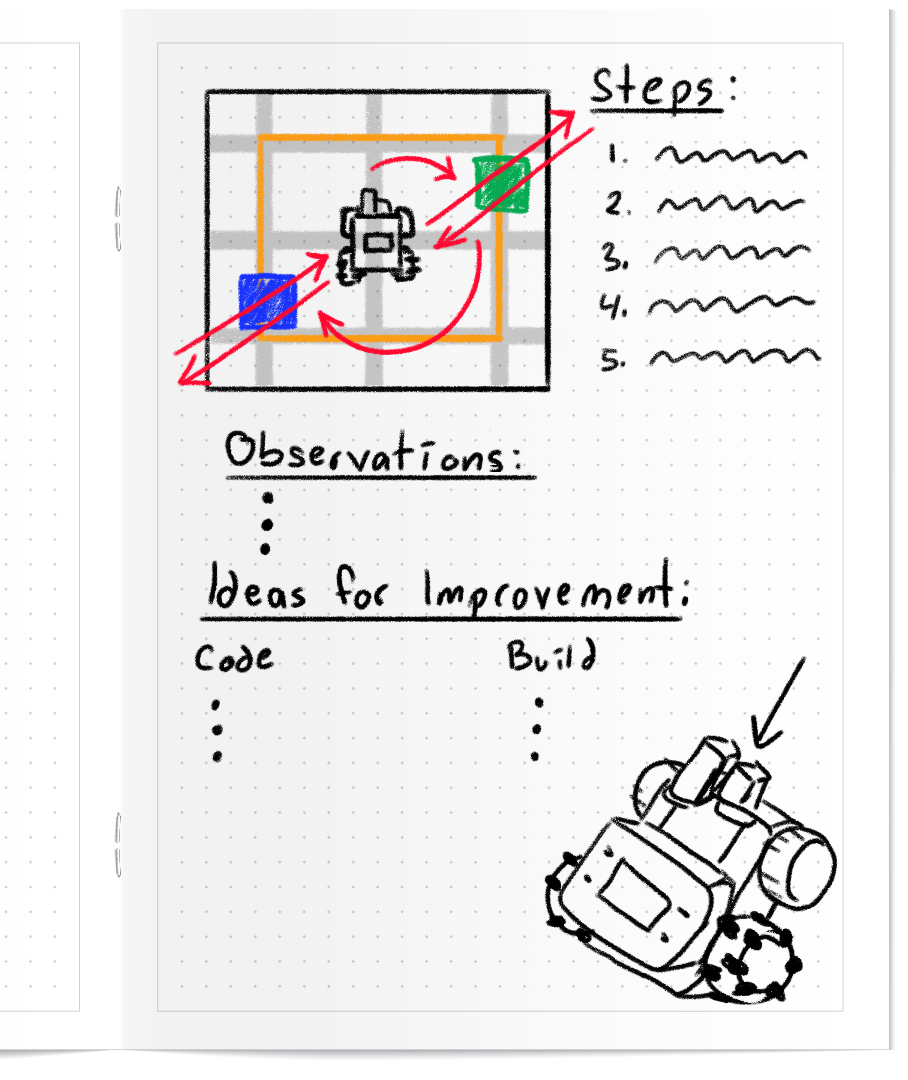
- 始める前に、ロボットに させたい動作を計画してください。 これらの手順が、作成するコードとどのように関連しているかを考えてください。
- プロジェクトを実行するときに、ロボットがどのように動いているかをメモしてください。
- コードとロボットのビルドを改善するためのアイデアのリストを作成します。
結果を記録する方法の例については、この画像を参照してください。
チャレンジアクティビティの準備をする
Compete (次のページ) では、盛り上がったフィールドから 4 つの立方体を自律的に見つけて削除するようにロボットをコーディングします。 スイープ ザ フィールド チャレンジに参加する方法については、以下のドキュメントとアニメーションを参照してください 理解度を確認してから、チャレンジに向けて練習してください。