
Practice
In the last section, you learned how the Optical Sensor works and how you can use data from the sensor in your code to have your robot make decisions. Now, you are going to apply what you have learned to create an algorithm and complete the Robot Sweep practice activity.
In this activity, your robot will autonomously drive and push two cubes off of a raised Field. Watch the video below to see how you can apply what you have learned to complete the Robot Sweep practice activity.
Now it's your turn to complete the Robot Sweep practice activity!
In this animation, the BaseBot starts in the middle of a Field with two cubes placed randomly around it. The robot moves to detect and push the first cube off the Field, then moves to detect and push the second cube off the Field. This is one possible path your robot could take to complete the Robot Sweep practice activity.
Follow the steps in this document to complete this activity. Google / .docx / .pdf
As you complete the Robot Sweep practice activity, document your findings in your engineering notebook.
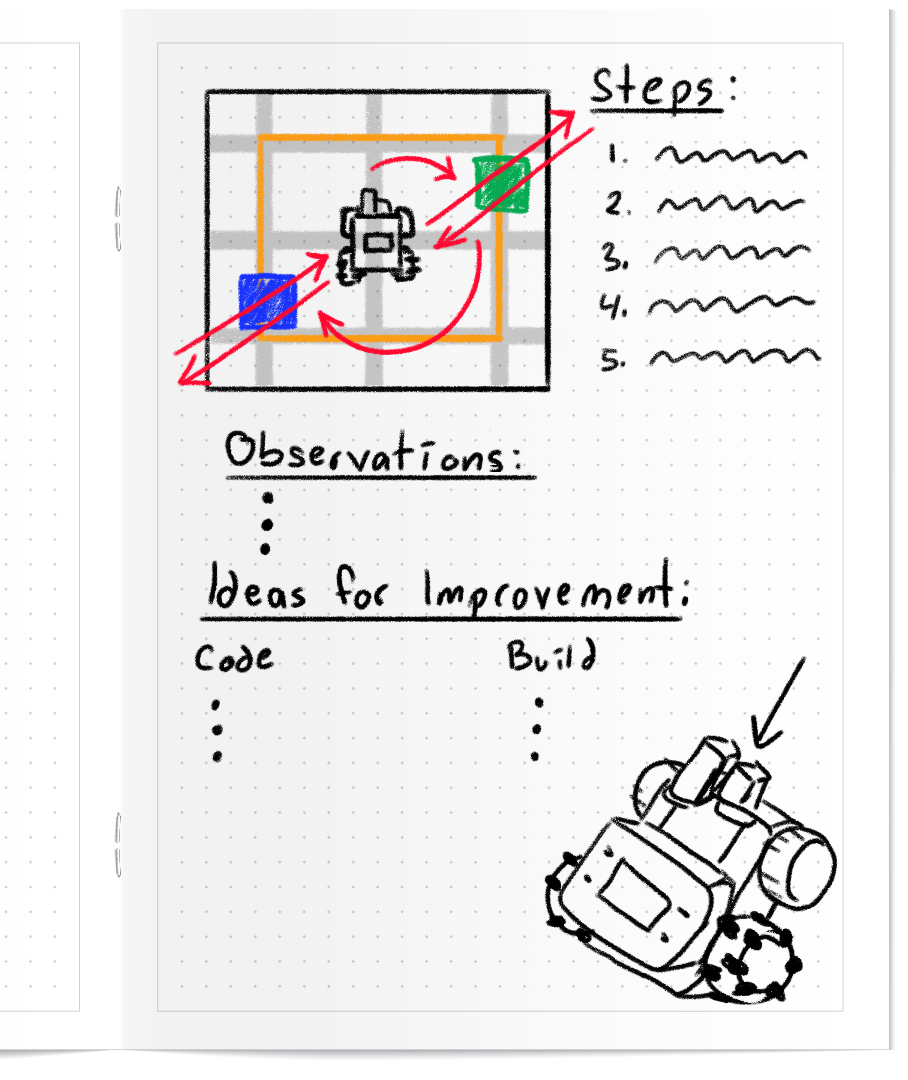
- Before beginning, plan the behaviors you want your robot to complete. Think about how these steps relate to the code you want to create.
- As your run your project, take notes on how the robot is moving.
- Make a list of ideas for improvements to make to your code and to your robot's build.
View this image for an example of how you can record your results.
Prepare for the Challenge Activity
In Compete (on the next page), you will code your robot to autonomously find and remove four cubes from a raised Field. Look at the document and animation below to learn how to compete in the Sweep the Field Challenge, check your understanding, then practice for the challenge.
Watch this animation below to see an example of how your robot could move in a successful run of the challenge. The BaseBot moves to detect the first cube, and pushes it off the Field. It then moves to detect the next cube. The animation then shows the end of the timed trial as the fourth cube is detected and pushed off the Field.
The goal of this challenge is to have your robot autonomously drive to find and remove four cubes from a raised Field in the fastest time.
This is just one possible path your robot could take to complete the Sweep the Field Challenge.
Follow the steps in this document to learn more about how to complete this activity. Google /. .docx. /. .pdf
Check Your Understanding
Before beginning the challenge, ensure that you understand the rules and setup of the challenge by answering the questions in the document below in your engineering notebook.
Check Your Understanding questions Google / .docx / .pdf
After completing the questions, try practicing the challenge.
Select Next > to compete in the Sweep the Field Challenge.