
പരിശീലിക്കുക
അവസാന ഭാഗത്ത്, ഒപ്റ്റിക്കൽ സെൻസർ എങ്ങനെ പ്രവർത്തിക്കുന്നുവെന്നും നിങ്ങളുടെ റോബോട്ടിനെ തീരുമാനങ്ങൾ എടുക്കാൻ പ്രേരിപ്പിക്കുന്നതിന് നിങ്ങളുടെ കോഡിലെ സെൻസറിൽ നിന്നുള്ള ഡാറ്റ എങ്ങനെ ഉപയോഗിക്കാമെന്നും നിങ്ങൾ പഠിച്ചു. ഇനി, നിങ്ങൾ പഠിച്ച കാര്യങ്ങൾ പ്രയോഗിച്ച് ഒരു അൽഗോരിതം സൃഷ്ടിക്കാനും റോബോട്ട് സ്വീപ്പ് പരിശീലന പ്രവർത്തനം പൂർത്തിയാക്കാനും പോകുന്നു.
ഈ പ്രവർത്തനത്തിൽ, നിങ്ങളുടെ റോബോട്ട് സ്വയം ഡ്രൈവ് ചെയ്യുകയും ഉയർത്തിയ ഒരു ഫീൽഡിൽ നിന്ന് രണ്ട് ക്യൂബുകൾ തള്ളുകയും ചെയ്യും. റോബോട്ട് സ്വീപ്പ് പരിശീലന പ്രവർത്തനം പൂർത്തിയാക്കാൻ നിങ്ങൾ പഠിച്ച കാര്യങ്ങൾ എങ്ങനെ പ്രയോഗിക്കാമെന്ന് കാണാൻ താഴെയുള്ള വീഡിയോ കാണുക.
ഇനി റോബോട്ട് സ്വീപ്പ് പരിശീലന പ്രവർത്തനം പൂർത്തിയാക്കാനുള്ള നിങ്ങളുടെ ഊഴമാണ്!
ഈ ആനിമേഷനിൽ, ബേസ്ബോട്ട് ഒരു ഫീൽഡിന്റെ മധ്യത്തിൽ ആരംഭിക്കുന്നു, അതിനു ചുറ്റും ക്രമരഹിതമായി രണ്ട് ക്യൂബുകൾ സ്ഥാപിച്ചിരിക്കുന്നു. ആദ്യത്തെ ക്യൂബ് കണ്ടെത്തി ഫീൽഡിൽ നിന്ന് പുറത്തേക്ക് തള്ളാൻ റോബോട്ട് നീങ്ങുന്നു, തുടർന്ന് രണ്ടാമത്തെ ക്യൂബ് കണ്ടെത്തി ഫീൽഡിൽ നിന്ന് പുറത്തേക്ക് തള്ളാൻ നീങ്ങുന്നു. റോബോട്ട് സ്വീപ്പ് പരിശീലന പ്രവർത്തനം പൂർത്തിയാക്കാൻ നിങ്ങളുടെ റോബോട്ടിന് സ്വീകരിക്കാവുന്ന ഒരു വഴിയാണിത്.
ഈ പ്രവർത്തനം പൂർത്തിയാക്കാൻ ഈ പ്രമാണത്തിലെ ഘട്ടങ്ങൾ പാലിക്കുക. Google / .docx / .pdf
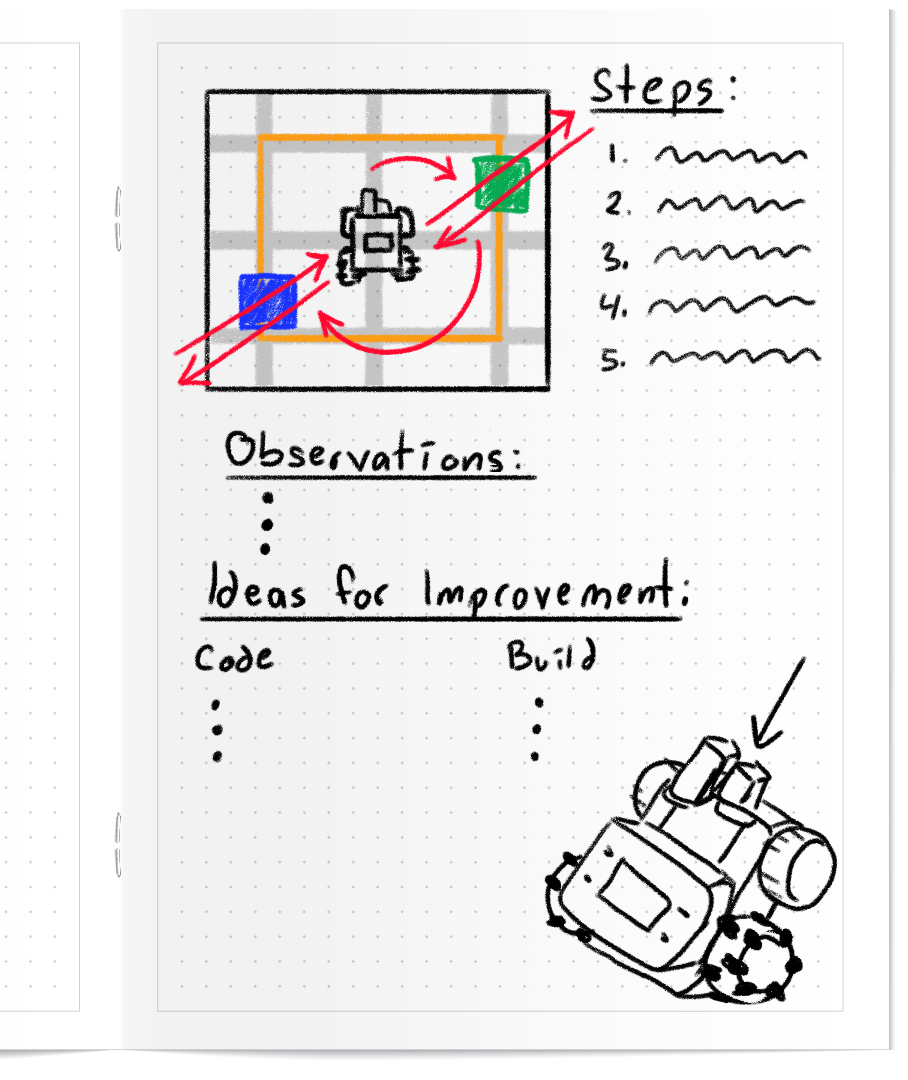
റോബോട്ട് സ്വീപ്പ് പരിശീലന പ്രവർത്തനം പൂർത്തിയാക്കുമ്പോൾ, നിങ്ങളുടെ കണ്ടെത്തലുകൾ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ രേഖപ്പെടുത്തുക.
- ആരംഭിക്കുന്നതിന് മുമ്പ്, നിങ്ങളുടെ റോബോട്ട് പൂർത്തിയാക്കാൻ ആഗ്രഹിക്കുന്ന പെരുമാറ്റരീതികൾ ആസൂത്രണം ചെയ്യുക. നിങ്ങൾ സൃഷ്ടിക്കാൻ ആഗ്രഹിക്കുന്ന കോഡുമായി ഈ ഘട്ടങ്ങൾ എങ്ങനെ ബന്ധപ്പെട്ടിരിക്കുന്നുവെന്ന് ചിന്തിക്കുക.
- നിങ്ങളുടെ പ്രോജക്റ്റ് നടത്തുമ്പോൾ, റോബോട്ട് എങ്ങനെ നീങ്ങുന്നുവെന്ന് കുറിപ്പുകൾ എടുക്കുക.
- നിങ്ങളുടെ കോഡിലും റോബോട്ടിന്റെ നിർമ്മാണത്തിലും വരുത്തേണ്ട മെച്ചപ്പെടുത്തലുകളുടെ ഒരു പട്ടിക തയ്യാറാക്കുക.
നിങ്ങളുടെ ഫലങ്ങൾ എങ്ങനെ രേഖപ്പെടുത്താം എന്നതിന്റെ ഒരു ഉദാഹരണത്തിനായി ഈ ചിത്രം കാണുക.
വെല്ലുവിളി നിറഞ്ഞ പ്രവർത്തനത്തിനായി തയ്യാറെടുക്കുക
അടുത്ത പേജിൽ, മത്സരിക്കുക എന്ന വിഭാഗത്തിൽ, ഉയർത്തിയ ഒരു ഫീൽഡിൽ നിന്ന് നാല് ക്യൂബുകൾ സ്വയം കണ്ടെത്തി നീക്കം ചെയ്യാൻ നിങ്ങളുടെ റോബോട്ടിനെ കോഡ് ചെയ്യും. സ്വീപ്പ് ദി ഫീൽഡ് ചലഞ്ചിൽ എങ്ങനെ മത്സരിക്കാമെന്ന് മനസിലാക്കാൻ താഴെയുള്ള ഡോക്യുമെന്റും ആനിമേഷനും നോക്കുക, നിങ്ങളുടെ ഗ്രാഹ്യം പരിശോധിക്കുക, തുടർന്ന് വെല്ലുവിളിക്കായി പരിശീലിക്കുക.
വെല്ലുവിളി വിജയകരമായി നേരിടാൻ നിങ്ങളുടെ റോബോട്ട് എങ്ങനെ നീങ്ങുമെന്നതിന്റെ ഒരു ഉദാഹരണം കാണാൻ താഴെയുള്ള ഈ ആനിമേഷൻ കാണുക. ആദ്യത്തെ ക്യൂബ് കണ്ടെത്താൻ ബേസ്ബോട്ട് നീങ്ങുകയും അതിനെ ഫീൽഡിൽ നിന്ന് തള്ളിമാറ്റുകയും ചെയ്യുന്നു. പിന്നീട് അത് അടുത്ത ക്യൂബ് കണ്ടെത്താൻ നീങ്ങുന്നു. നാലാമത്തെ ക്യൂബ് കണ്ടെത്തി ഫീൽഡിൽ നിന്ന് തള്ളിയിടുമ്പോൾ, ആനിമേഷൻ സമയബന്ധിതമായ ട്രയലിന്റെ അവസാനം കാണിക്കുന്നു.
ഈ വെല്ലുവിളിയുടെ ലക്ഷ്യം, നിങ്ങളുടെ റോബോട്ട് സ്വയം ഡ്രൈവ് ചെയ്ത് ഉയർന്ന ഫീൽഡിൽ നിന്ന് ഏറ്റവും വേഗത്തിൽ നാല് ക്യൂബുകൾ കണ്ടെത്തി നീക്കം ചെയ്യുക എന്നതാണ്.
സ്വീപ്പ് ദി ഫീൽഡ് ചലഞ്ച് പൂർത്തിയാക്കാൻ നിങ്ങളുടെ റോബോട്ടിന് സ്വീകരിക്കാവുന്ന ഒരു വഴി മാത്രമാണിത്.
ഈ പ്രവർത്തനം എങ്ങനെ പൂർത്തിയാക്കാമെന്ന് കൂടുതലറിയാൻ ഈ പ്രമാണത്തിലെ ഘട്ടങ്ങൾ പാലിക്കുക. Google/. .ഡോക്സ്. /. .പിഡിഎഫ്
നിങ്ങളുടെ ധാരണ പരിശോധിക്കുക
വെല്ലുവിളി ആരംഭിക്കുന്നതിന് മുമ്പ്, നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ താഴെയുള്ള ഡോക്യുമെന്റിലെ ചോദ്യങ്ങൾക്ക് ഉത്തരം നൽകിക്കൊണ്ട് വെല്ലുവിളിയുടെ നിയമങ്ങളും സജ്ജീകരണവും നിങ്ങൾ മനസ്സിലാക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക.
നിങ്ങളുടെ ധാരണ പരിശോധിക്കുക ചോദ്യങ്ങൾ Google / .docx / .pdf
ചോദ്യങ്ങൾ പൂർത്തിയാക്കിയ ശേഷം, വെല്ലുവിളി പരിശീലിക്കാൻ ശ്രമിക്കുക.
സ്വീപ്പ് ദി ഫീൽഡ് ചലഞ്ചിൽ മത്സരിക്കാൻ അടുത്തത് > തിരഞ്ഞെടുക്കുക.