
Gioca
Parte 1 - Passo dopo passo
- IstruireIstruire gli studenti che costruiranno un progetto in VEXcode 123 per guidare
il Robot 123 fino a quando non rileverà un oggetto sull'area di atterraggio su Marte (il Campo 123).
Visualizza l'animazione qui sotto per vedere il robot guidare fino a raggiungere l'ostacolo una volta
avviato il progetto. Assicurarsi di utilizzare oggetti luminosi o di colore bianco per rappresentare gli
"ostacoli" sull'area di atterraggio per garantire che il sensore oculare rilevi questi oggetti.
File video
- ModelloModello per gli studenti su come costruire e testare un progetto in VEXcode 123.
- Inizia mostrando agli studenti come collegare i loro 123 robot al loro dispositivo in VEXcode 123. Poiché i passaggi di connessione variano tra i dispositivi, consultare gli articoli di connessione della libreria VEXCODE 123 VEX per i passaggi specifici per collegare il robot 123 al computer o al tablet.
-
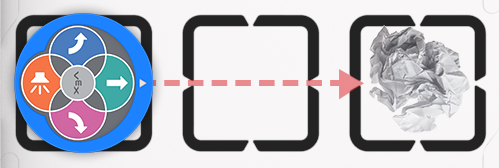
Trascinare un blocco [Drive until] nell'area di lavoro e collegarlo al {When started} blocco.
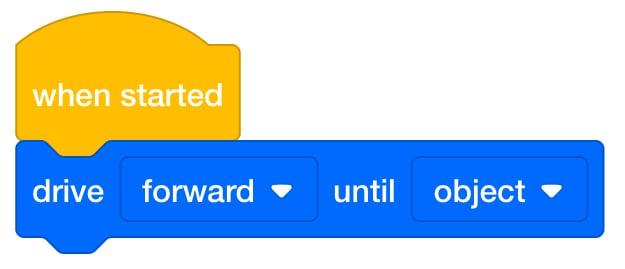
Aggiungi blocco [Drive until] - Una volta che gli studenti hanno costruito il loro progetto, chiedi loro di nominare il loro progetto come Drive Until 1 e salvarlo sul loro dispositivo. Vedere la sezione Apri e salva della libreria VEXcode 123 VEX per i passaggi specifici del dispositivo per salvare un progetto VEXcode 123.
- Modello per gli studenti su come testare il loro progetto sul campo.
-
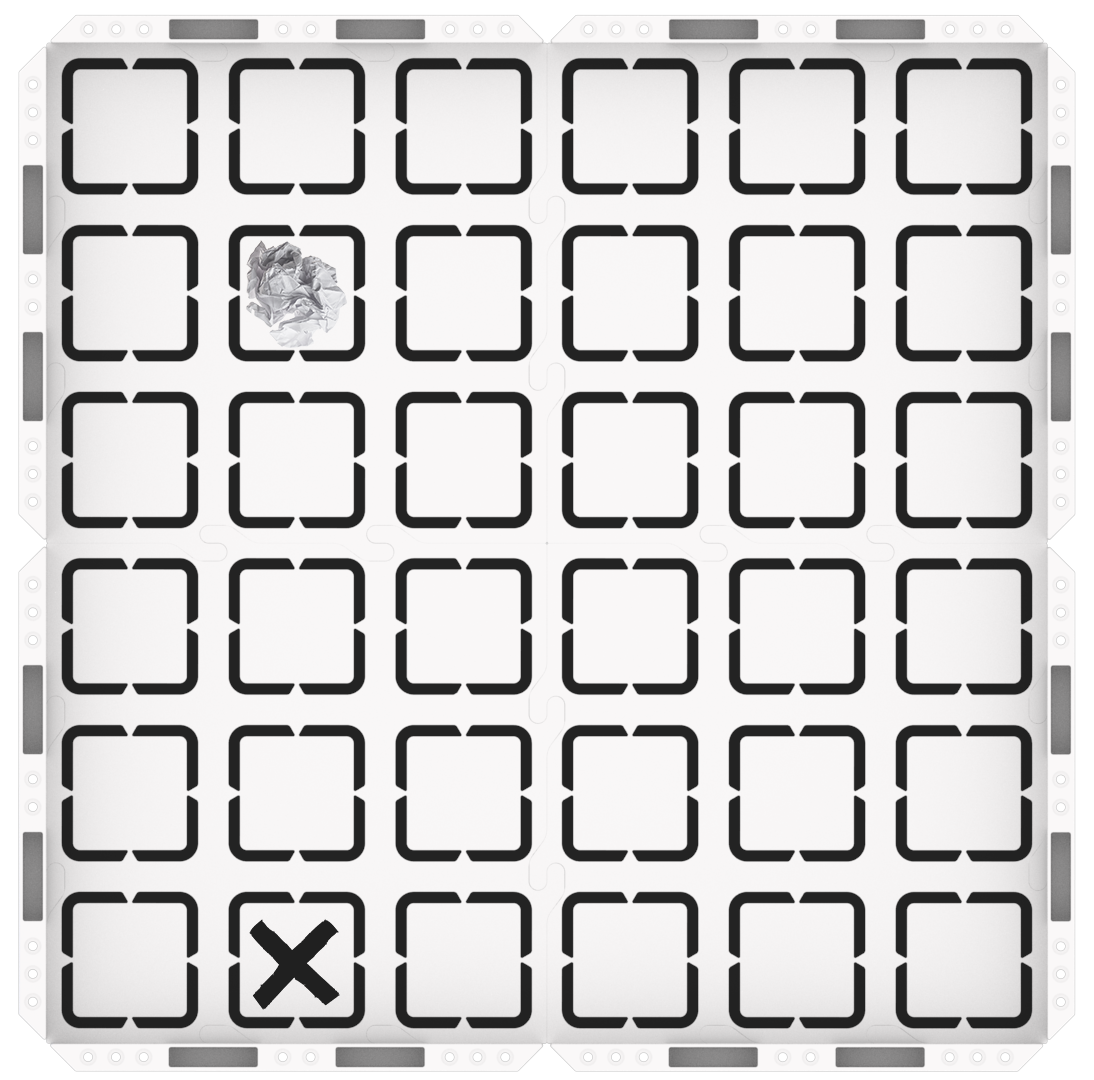
Per prima cosa, mostra loro come posizionare il Robot 123 sulla piazza con la"X".
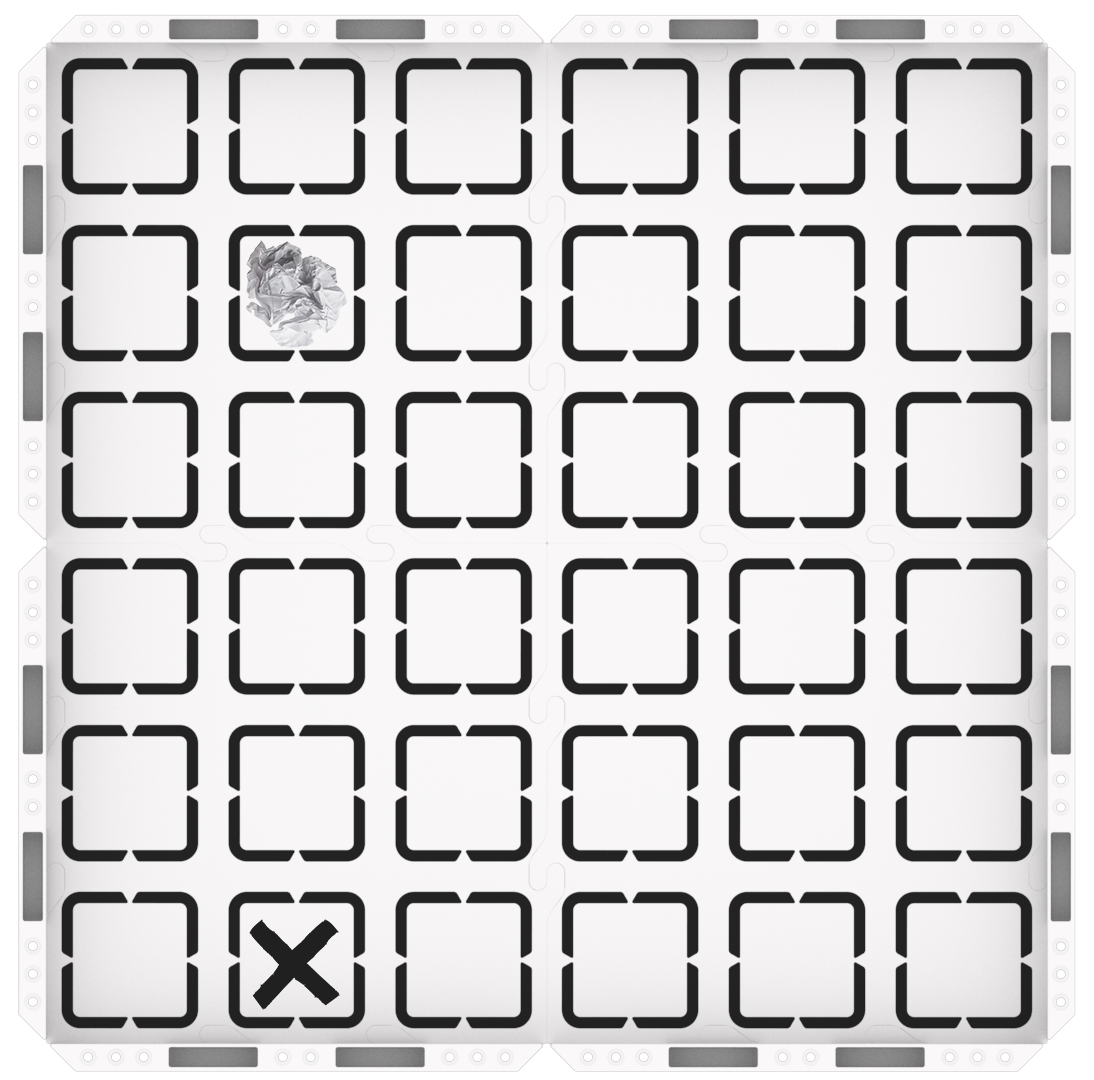
123 Impostazione del campo -
Assicurarsi che il sensore oculare, situato sulla parte anteriore del robot, sia rivolto verso l'ostacolo.
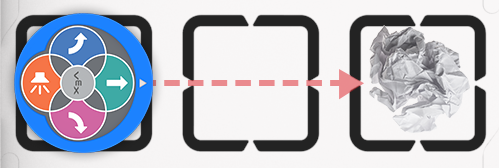
Il sensore per gli occhi affronta l'ostacolo
-
-
Una volta posizionato il robot 123 sul campo, chiedi agli studenti di selezionare "Start" in VEXcode 123 per testare i loro progetti.
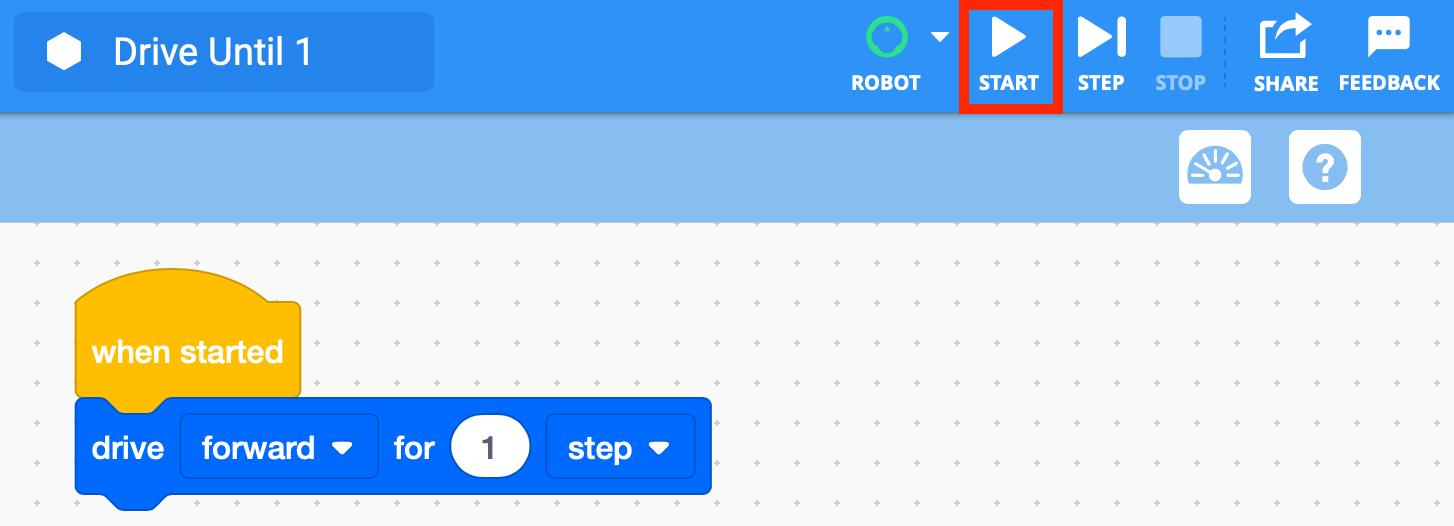
Seleziona "Avvia" per testare il progetto -
Al termine dell'esecuzione del progetto, gli studenti dovranno selezionare il pulsante "Stop" nella barra degli strumenti.
Seleziona "Stop" - Per i gruppi che finiscono prima e hanno bisogno di ulteriori sfide, chiedi loro di spostare l'ostacolo in una nuova posizione e testare di nuovo il loro progetto.
- FacilitaFacilita una conversazione con gli studenti mentre testano i loro progetti.
- Come si muove il Robot 123 in questo progetto? Puoi mostrarmelo con le mani?
- Come faceva il Robot 123 a sapere quando fermarsi?
- Come fai a sapere quando c'è qualcosa davanti a te?
- Se tu fossi il Robot 123, quale dei tuoi sensi ti aiuterebbe a [Guidare fino a] un oggetto?
- RicordaRicorda agli studenti che anche se si tratta di un piccolo progetto, potrebbero
commettere errori e potrebbe essere necessario più di un tentativo per far funzionare il loro progetto con
successo. Al fine di incoraggiare gli studenti ad accettare gli errori lungo il percorso, porre domande
come:
- Quale errore hai commesso che ti ha insegnato qualcosa?
- Quale parte del laboratorio ti ha fatto riflettere?
- È stato difficile allineare il rover 123 Robot in modo che il sensore oculare fosse rivolto verso l'oggetto? Quale strategia hai usato per allinearlo?
- ChiediChiedi agli studenti di nominare o descrivere un dispositivo o un oggetto che pensano utilizzi un sensore oculare. Chiedi loro se hanno sentito parlare di un robot aspirapolvere? Possono descrivere come un comando "Drive until" potrebbe funzionare con questo dispositivo?
Discussione di & gruppo di pausa a metà partita
Non appena ogni gruppo ha finito di testare i propri progetti, riunitevi per una breve conversazione.
- Proietta il tuo schermo in modo che tutti gli studenti possano vedere il codice o porta gli studenti in un'area centrale dove tutti possono vedere il codice sul tuo tablet o computer.
- Avviare il progetto Drive Until 1 e chiedere agli studenti di guardare il codice durante
l'esecuzione del progetto e descrivere ciò che vedono. Invita gli studenti a descrivere cosa succede con
la funzione di evidenziazione e identifica che rimane sul blocco [Drive until] fino a quando l'Eye Sensor
non rileva un oggetto.
- Come si sposta l'evidenziazione verde quando iniziamo il nostro progetto?
- Perché pensi che l'evidenziazione verde si fermi sul blocco [Drive until]?
- Cosa pensi che ci dica il momento clou?
Parte 2 - Passo dopo passo
- IstruisciIstruisci gli studenti che aggiungeranno al loro progetto in modo che il robot
123 segnali quando il sensore oculare ha rilevato un ostacolo nell'area di atterraggio su Marte. Gli
studenti aggiungeranno blocchi [Glow] e [Wait] al loro progetto per creare un effetto segnale. Mentre
testano i loro progetti, rimuoveranno l'ostacolo quando il robot si illumina. L'animazione seguente mostra
come si muoverà il rover 123 Robot all'avvio del progetto. Una volta che il Robot 123 si illumina, gli
studenti dovranno rimuovere l'ostacolo dal Campo 123. Questo è mostrato anche nell'animazione.
File video
- ModelloModello per gli studenti su come costruire sul loro progetto VEXcode 123
esistente e testarlo sul campo.
- Se gli studenti devono aprire il loro progetto Drive Until 1, modellare i passaggi specifici del dispositivo, come mostrato negli articoli della LibreriaEX nella sezione Apri e salva.
-
Chiedi agli studenti di aggiungere blocchi ai loro progetti VEXcode 123 per ricreare il codice nell'immagine qui sotto. I nuovi blocchi avranno il 123 Robot verde per 2 secondi per segnalare che rileva un oggetto. La casella rossa indica i nuovi blocchi che devono essere aggiunti al progetto.
 Progetto
Progetto Drive Until 2 - Il blocco [Luminescenza] impostato su verde renderà l'indicatore luminoso al centro del Robot 123 verde luminescente.
- Il blocco [Wait] attende un determinato periodo di tempo prima di passare al blocco successivo.
- Il blocco [Bagliore] impostato su OFF interromperà l'effetto bagliore.
- Una volta che gli studenti hanno costruito il loro progetto, chiedi loro di chiamarlo Drive Until 2 e di salvarlo sul loro dispositivo. Vedere la sezione Apri e salva della libreria VEXcode 123 VEX per i passaggi specifici del dispositivo per salvare un progetto VEXcode 123.
-
Ricorda agli studenti come posizionare il loro Robot 123 sul campo per testare il loro progetto.
123 Impostazione del campo - Assicurarsi che il sensore oculare, situato sulla parte anteriore del robot, sia rivolto verso
l'ostacolo.
- Assicurarsi che il sensore oculare, situato sulla parte anteriore del robot, sia rivolto verso
l'ostacolo.
-
Quindi, seleziona "Avvia" in VEXcode 123 per testare i loro progetti.
Seleziona "Avvia" per testare il progetto - Dopo che il Robot 123 guida fino a quando non rileva l'ostacolo, dovrebbe brillare di verde per due secondi per segnalare che rileva un oggetto. Gli studenti dovrebbero rimuovere l'oggetto quando il Robot 123 si illumina di verde.
-
Ricorda agli studenti che dovranno selezionare il pulsante "Stop" nella barra degli strumenti dopo aver rimosso l'oggetto.
Seleziona "Stop" - Se gli studenti finiscono di costruire e testare rapidamente i loro progetti, chiedi loro di aggiungere un [Riproduci suono] al loro progetto per segnalare che l'oggetto è stato rimosso dall'area di atterraggio. Incoraggiali a sperimentare i diversi suoni che possono far fare al Robot 123 con questo blocco.
- FacilitareFacilitare gli studenti che testano i loro progetti e si alternano sul Campo
123. Mentre gli studenti stanno testando, fai loro domande sul sensore oculare e su come si muoverà il
robot 123 in base ai blocchi del loro progetto.
- In che modo il tuo robot 123 segnalerà di aver rilevato un oggetto?
- Quanto è lontano dall'ostacolo il robot 123 quando smette di guidare? Puoi mostrarmelo con le mani?
- Quali blocchi nel nostro progetto dicono al robot 123 di smettere di guidare?
- RicordaRicorda agli studenti che dovrebbero controllare il loro progetto e confrontarlo
con l'immagine del progetto.
- Questo può essere fatto all'interno di un gruppo: se uno studente ha costruito il progetto in VEXcode 123, il suo partner può controllare il codice, prima di posizionare il robot 123 e avviare il progetto.
-
Oppure, puoi associare i gruppi per rendere questa un'attività divertente in cui i gruppi possono controllare i rispettivi progetti per assicurarsi che i loro blocchi corrispondano tutti. "Vedo un blocco [Drive until] sotto il {When started} blocco." Anche il tuo gruppo ce l'ha? Fantastico!

Il tuo codice corrisponde?
- ChiediChiedi agli studenti, in che modo gli scienziati esplorano luoghi lontani?
Scienziati e ingegneri progettano diversi tipi di robot per esplorare aree troppo lontane o troppo pericolose da indagare per gli esseri umani. Gli scienziati progettano rover per esplorare Marte, sottomarini senza equipaggio per indagare sull'oceano e persino far volare droni su vulcani attivi per raccogliere dati!
- Come potevano gli scienziati programmare un sottomarino per utilizzare sensori oculari con un comando "guida fino a" per esplorare l'oceano?
- In che modo gli scienziati potrebbero utilizzare i sensori oculari su un drone per aiutare a esplorare un vulcano? Quale comando userebbero per far volare il drone fino a quando non è vicino alle pareti del vulcano?
- Quali altri compiti potrebbero codificare un rover su Marte da fare con un comando "drive until"?