
Jugar
Parte 1 - Paso a paso
- Indique a los estudiantes que van a construir un proyecto en VEXcode 123 para conducir el Robot 123 hasta que detecte un objeto en el área de aterrizaje de Marte (el Campo 123). Vea la animación a continuación para ver la unidad del robot hasta que alcance el obstáculo una vez que se inicie el proyecto. Asegúrese de usar objetos claros o de color blanco para representar los "obstáculos" en el área de aterrizaje para asegurarse de que el sensor ocular detecte estos objetos.
Archivo de vídeo
- Modelo para estudiantes de cómo construir y probar un proyecto en VEXcode 123.
- Comience mostrando a los estudiantes cómo conectar sus 123 Robots a su dispositivo en VEXcode 123. Debido a que los pasos de conexión varían entre dispositivos, consulte los artículos de conexión de la biblioteca VEXCODE 123 VEX para conocer los pasos específicos para conectar el 123 Robot a su ordenador o tableta.
-
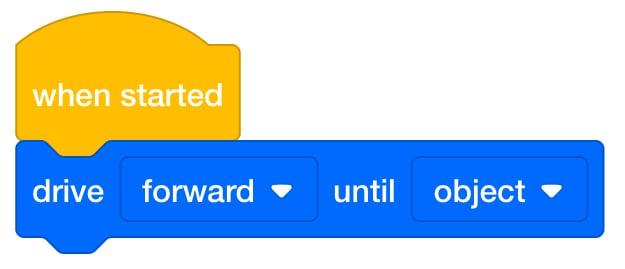
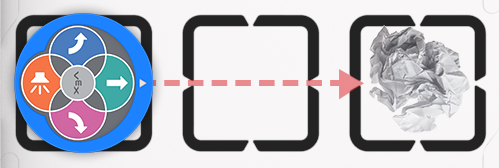
Arrastra un bloque [Drive until] al espacio de trabajo y adjúntalo al {When started} bloque.
Añadir bloque [Drive until] - Una vez que los estudiantes hayan construido su proyecto, pídales que lo llamen Drive Until 1 y lo guarden en su dispositivo. Consulte la sección Abrir y guardar de la biblioteca VEXcode 123 VEX para conocer los pasos específicos del dispositivo para guardar un proyecto VEXcode 123.
- Modelo para que los estudiantes prueben su proyecto en el campo.
-
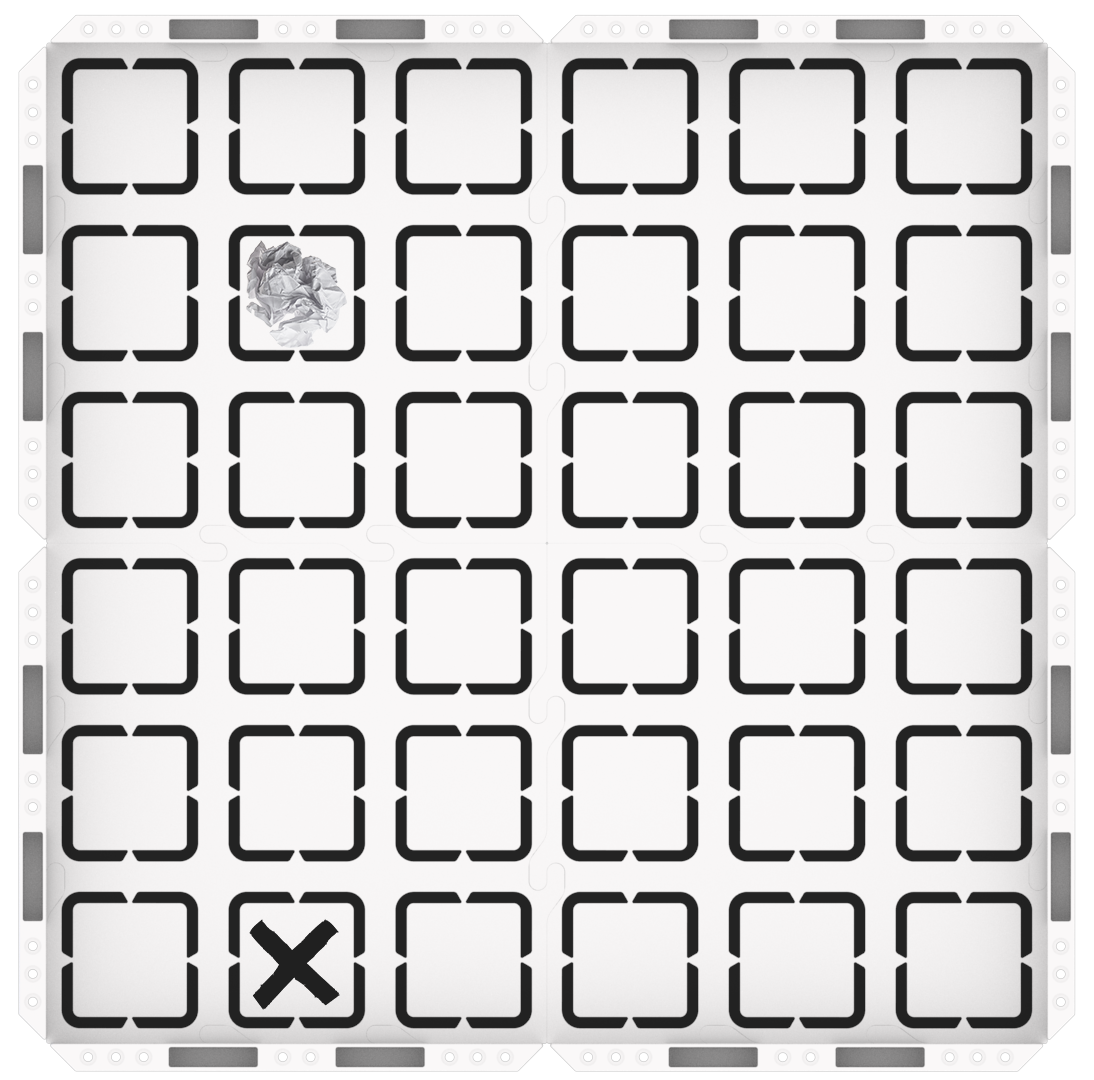
Primero, muéstrales cómo colocar el Robot 123 en el cuadrado con la"X".
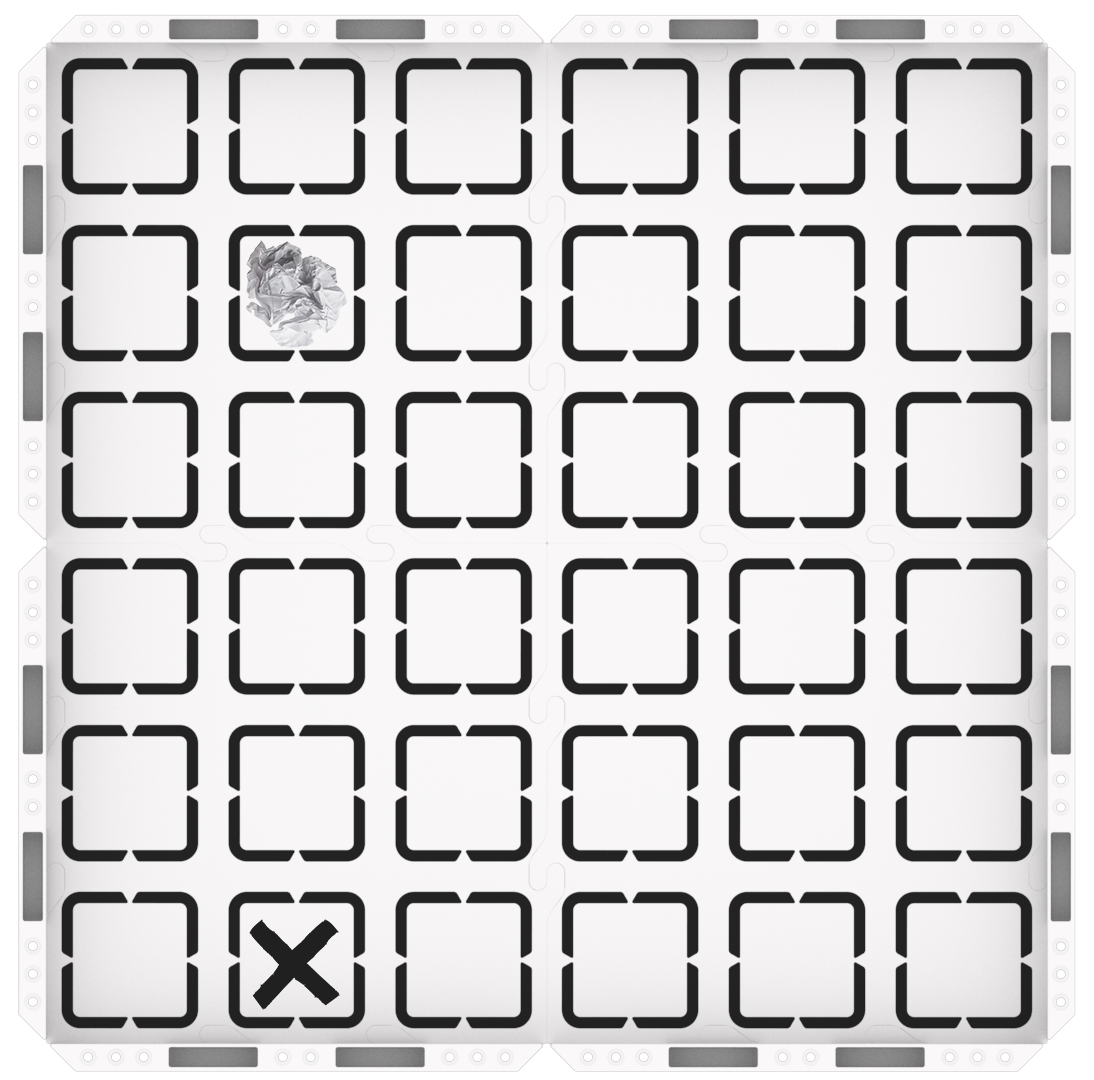
123 Configuración de campo -
Asegúrese de que el sensor ocular, ubicado en la parte frontal del robot, esté frente al obstáculo.
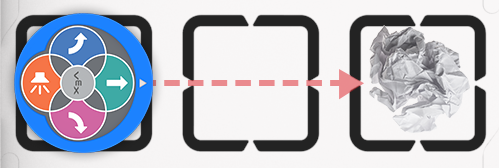
El sensor ocular se enfrenta a un obstáculo
-
-
Una vez que el Robot 123 se coloque en el Campo, haga que los estudiantes seleccionen ‘Iniciar’ en VEXcode 123 para probar sus proyectos.
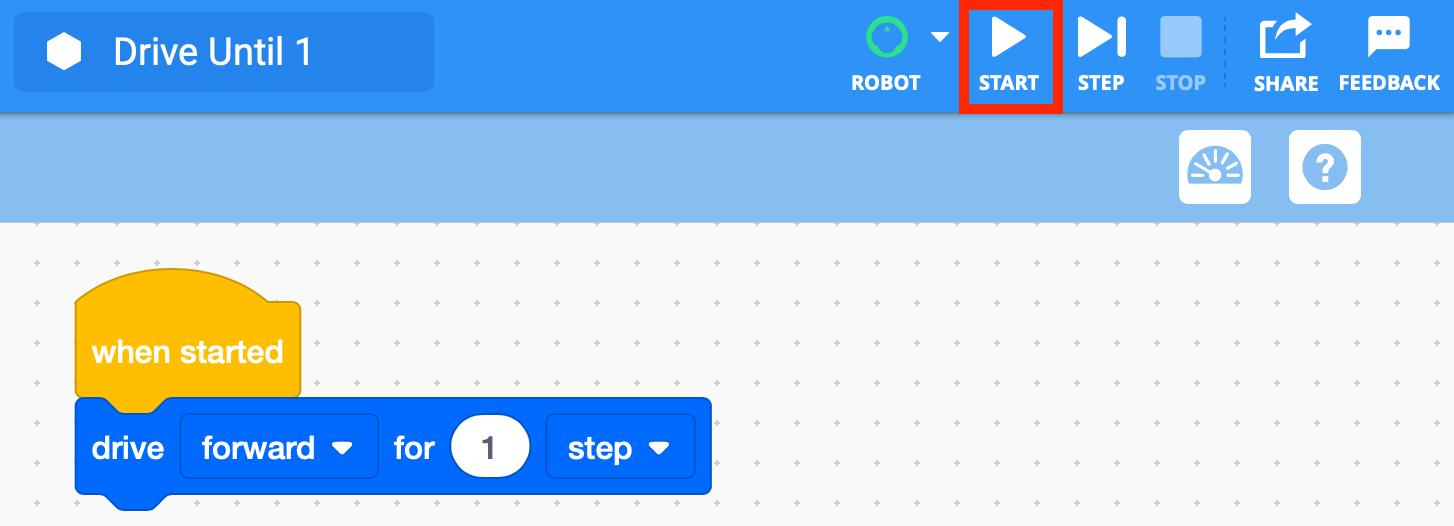
Seleccione ‘Iniciar’ para probar el proyecto -
Después de que el proyecto termine de ejecutarse, los estudiantes deberán seleccionar el botón "Detener" en la barra de herramientas.
Selecciona "Detener". - Para los grupos que terminan temprano y necesitan desafíos adicionales, pídales que muevan el obstáculo a una nueva ubicación y prueben su proyecto nuevamente.
- Facilite una conversación con los estudiantes mientras prueban sus proyectos.
- ¿Cómo se mueve el Robot 123 en este proyecto? ¿Puedes mostrarme con tus manos?
- ¿Cómo sabía el Robot 123 cuándo parar?
- ¿Cómo sabes cuando hay algo delante de ti?
- Si fueras el Robot 123, ¿cuál de tus sentidos te ayudaría a [Conducir hasta] un objeto?
- Recuerde a los estudiantes que, aunque este es un proyecto pequeño, pueden cometer errores y puede tomar más de un intento para que su proyecto funcione con éxito. Para animar a los estudiantes a aceptar los errores en el camino, haga preguntas como:
- ¿Qué error cometiste que te enseñó algo?
- ¿Qué parte del laboratorio te hizo pensar mucho?
- ¿Fue difícil alinear el robot explorador 123 para que el sensor ocular mirara hacia el objeto? ¿Qué estrategia usaste para alinearlo?
- Pida a los estudiantes que nombren o describan un dispositivo u objeto que creen que usa un sensor ocular. Pregúnteles si han oído hablar de una aspiradora robot. ¿Pueden describir cómo podría funcionar un comando "Conducir hasta" con este dispositivo?
Discusión & grupal de descanso a mitad del juego
Tan pronto como cada grupo haya terminado de probar sus proyectos, reúnanse para una breve conversación.
- Proyecta tu pantalla para que todos los estudiantes puedan ver el código, o lleva a los estudiantes a un área central donde todos puedan ver el código en tu tableta u ordenador.
- Inicie el proyecto Drive Until 1 y pida a los estudiantes que observen el código mientras se ejecuta el proyecto y describan lo que ven. Indique a los estudiantes que describan lo que sucede con la función de resaltado e identifiquen que permanece en el bloque [Conducir hasta] hasta que el sensor ocular detecte un objeto.
- ¿Cómo se mueve el resaltado verde cuando comenzamos nuestro proyecto?
- ¿Por qué crees que el resaltado verde se detiene en el bloque [Drive until]?
- ¿Qué crees que nos dice lo más destacado?
Parte 2 - Paso a paso
- Indique a los estudiantes que agregarán a su proyecto para que el robot 123 señale cuando el sensor ocular haya detectado un obstáculo en el área de aterrizaje de Marte. Los estudiantes añadirán bloques [Glow] y [Wait] a su proyecto para crear un efecto de señal. A medida que prueben sus proyectos, eliminarán el obstáculo cuando el robot se ilumine. La siguiente animación muestra cómo se moverá el robot explorador 123 Robot cuando se inicie el proyecto. Una vez que el Robot 123 brille, los estudiantes deberán eliminar el obstáculo del Campo 123. Esto también se muestra en la animación.
Archivo de vídeo
- Modelo para que los estudiantes construyan sobre su proyecto VEXcode 123 existente y lo prueben en el campo.
- Si los estudiantes necesitan abrir su proyecto Drive Until 1, modele los pasos específicos del dispositivo, como se muestra en los artículos de la Biblioteca VEX en la sección Abrir y guardar.
-
Haga que los estudiantes agreguen bloques a sus proyectos VEXcode 123 para recrear el código en la imagen a continuación. Los nuevos bloques tendrán el 123 Robot brillando en verde durante 2 segundos para indicar que detecta un objeto. El recuadro rojo indica los nuevos bloques que deben añadirse al proyecto.
 Proyecto
Proyecto Drive Until 2 - El bloque [Brillo] configurado en verde hará que la luz indicadora en el centro del 123 Robot brille en verde.
- El bloque [Esperar] espera una cantidad específica de tiempo antes de pasar al siguiente bloque.
- El bloque [Glow] desactivado detendrá el efecto de brillo.
- Una vez que los estudiantes hayan construido su proyecto, pídales que lo llamen Drive Until 2 y lo guarden en su dispositivo. Consulte la sección Abrir y guardar de la biblioteca VEXcode 123 VEX para conocer los pasos específicos del dispositivo para guardar un proyecto VEXcode 123.
-
Recuerde a los estudiantes cómo colocar su Robot 123 en el campo para probar su proyecto.
123 Configuración de campo - Asegúrese de que el sensor ocular, ubicado en la parte frontal del robot, esté frente al obstáculo.
- Asegúrese de que el sensor ocular, ubicado en la parte frontal del robot, esté frente al obstáculo.
-
A continuación, selecciona ‘Iniciar’ en VEXcode 123 para probar sus proyectos.
Seleccione ‘Iniciar’ para probar el proyecto - Después de que el 123 Robot conduzca hasta que detecte el obstáculo, debe brillar en verde durante dos segundos para indicar que detecta un objeto. Los estudiantes deben retirar el objeto cuando el Robot 123 se ilumine en verde.
-
Recuerde a los estudiantes que deberán seleccionar el botón "Detener" en la barra de herramientas después de quitar el objeto.
Selecciona "Detener". - Si los estudiantes terminan de construir y probar sus proyectos rápidamente, pídales que agreguen un [Reproducir sonido] a su proyecto para indicar que el objeto ha sido retirado del área de aterrizaje. Anímelos a experimentar con los diferentes sonidos que pueden hacer que el Robot 123 haga con este bloque.
- FacilitarFacilitar que los estudiantes prueben sus proyectos y se turnen en el Campo 123. Mientras los estudiantes realizan las pruebas, hágales preguntas sobre el sensor ocular y cómo se moverá el robot 123 en función de los bloques de su proyecto.
- ¿Cómo va a indicar su Robot 123 que ha detectado un objeto?
- ¿A qué distancia del obstáculo está el 123 Robot cuando deja de conducir? ¿Puedes mostrarme con tus manos?
- ¿Qué bloques de nuestro proyecto le dicen al Robot 123 que deje de conducir?
- RecuerdeRecuerde a los estudiantes que deben revisar su proyecto y compararlo con la imagen del proyecto.
- Esto se puede hacer dentro de un grupo: si un estudiante construyó el proyecto en VEXcode 123, su compañero puede verificar el código, antes de colocar el Robot 123 y comenzar el proyecto.
-
O bien, puedes emparejar grupos para hacer que esta sea una actividad divertida en la que los grupos puedan verificar los proyectos de los demás para asegurarse de que todos sus bloques coincidan. "Veo un bloque [Conducir hasta] debajo del {When started} bloque". ¿Tu grupo también tiene eso? ¡Genial!

¿Tu código coincide?
- Pregunte a los estudiantes, ¿cómo exploran los científicos lugares lejanos?
Los científicos e ingenieros diseñan diferentes tipos de robots para explorar áreas que están demasiado lejos o son demasiado peligrosas para que los humanos las investiguen. ¡Los científicos diseñan rovers para explorar Marte, submarinos no tripulados para investigar el océano e incluso volar drones en volcanes activos para recopilar datos!
- ¿Cómo podrían los científicos codificar un submarino para usar sensores oculares con un comando de "conducir hasta" para explorar el océano?
- ¿Cómo podrían los científicos usar sensores oculares en un dron para ayudar a explorar un volcán? ¿Qué comando usarían para que el dron vuele hasta que esté cerca de las paredes del volcán?
- ¿Qué otras tareas podrían los científicos codificar un rover de Marte para hacer con un comando de "conducir hasta"?