
Lecture
Partie 1 - Étape par étape
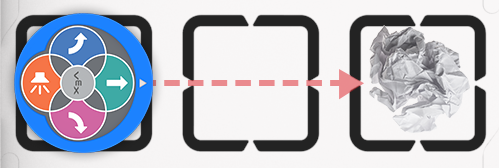
- InstruireInstruire les élèves qu'ils vont construire un projet dans VEXcode 123 pour conduire le robot 123 jusqu'à ce qu'il détecte un objet sur la zone d'atterrissage sur Mars (le champ 123). Regardez l'animation ci-dessous pour voir le robot conduire jusqu'à ce qu'il atteigne l'obstacle une fois le projet démarré. Assurez-vous d'utiliser des objets clairs ou de couleur blanche pour représenter les « obstacles » sur la zone d'atterrissage afin de vous assurer que le capteur oculaire détectera ces objets.
Fichier vidéo
- ModèleModèle pour les étudiants comment construire et tester un projet dans VEXcode 123.
- Commencez par montrer aux élèves comment connecter leurs 123 robots à leur appareil dans VEXcode 123. Étant donné que les étapes de connexion varient d'un appareil à l'autre, consultez les articles Connexion de la bibliothèque VEXCODE 123 VEX pour connaître les étapes spécifiques à suivre pour connecter le robot 123 à votre ordinateur ou à votre tablette.
-
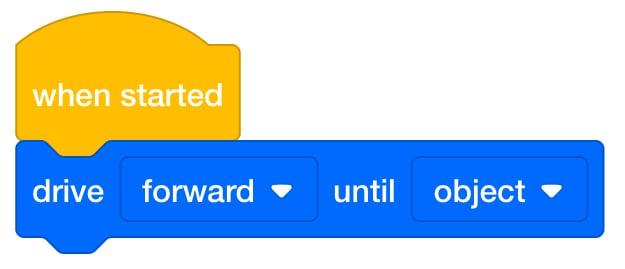
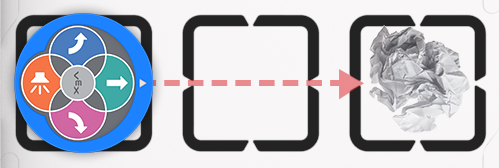
Faites glisser un bloc [Drive until] dans l'espace de travail et attachez-le au {When started} bloc.
Ajouter le bloc [Drive until] - Une fois que les étudiants ont construit leur projet, demandez-leur de nommer leur projet Drive Until 1 et de l'enregistrer sur leur appareil. Consultez la section Ouvrir et enregistrer de la bibliothèque VEXcode 123 VEX pour connaître les étapes spécifiques à l'appareil pour enregistrer un projet VEXcode 123.
- Modèle pour les étudiants comment tester leur projet sur le terrain.
-
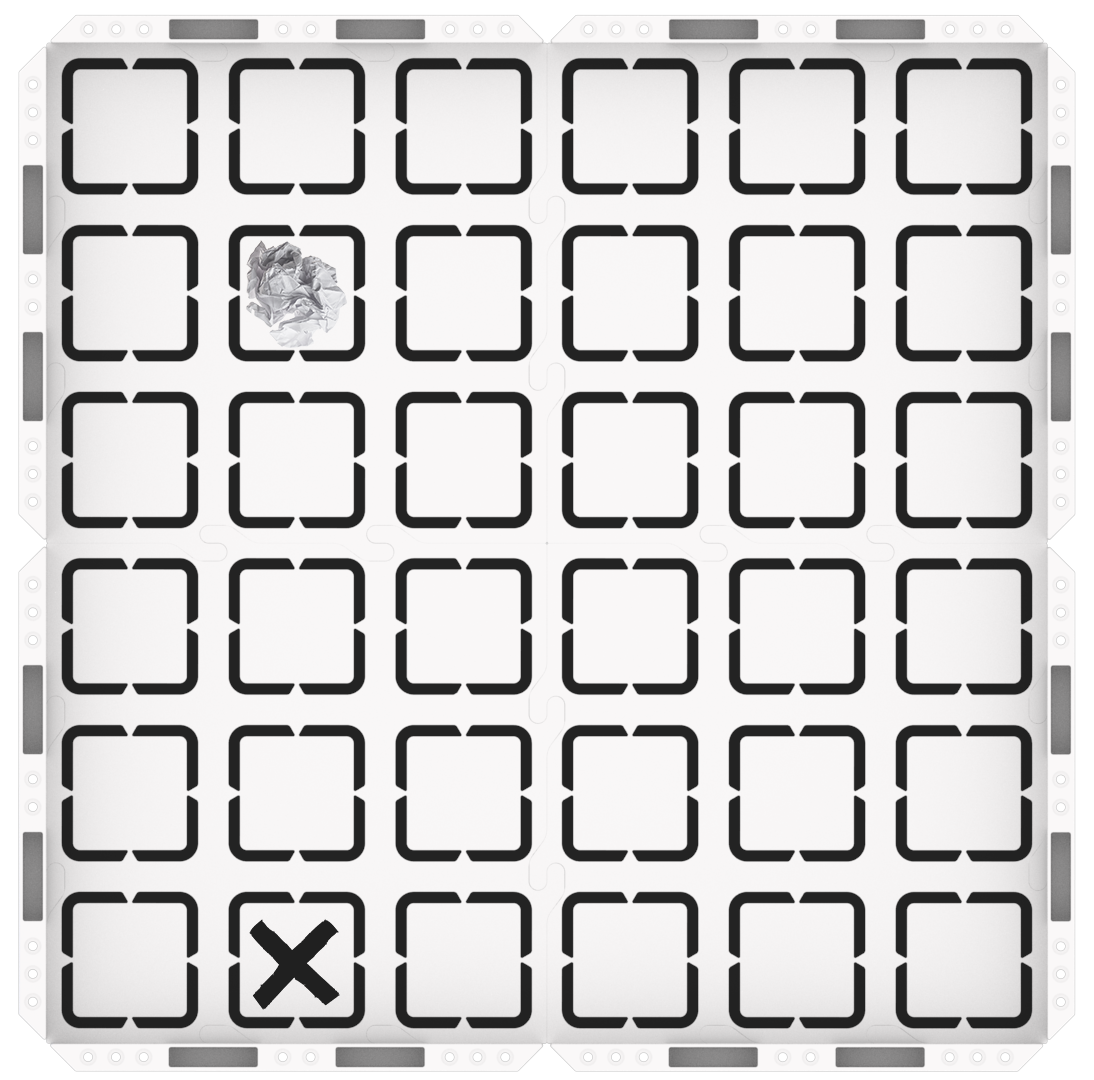
Tout d'abord, montrez-leur comment placer le robot 123 sur la place avec le« X ».
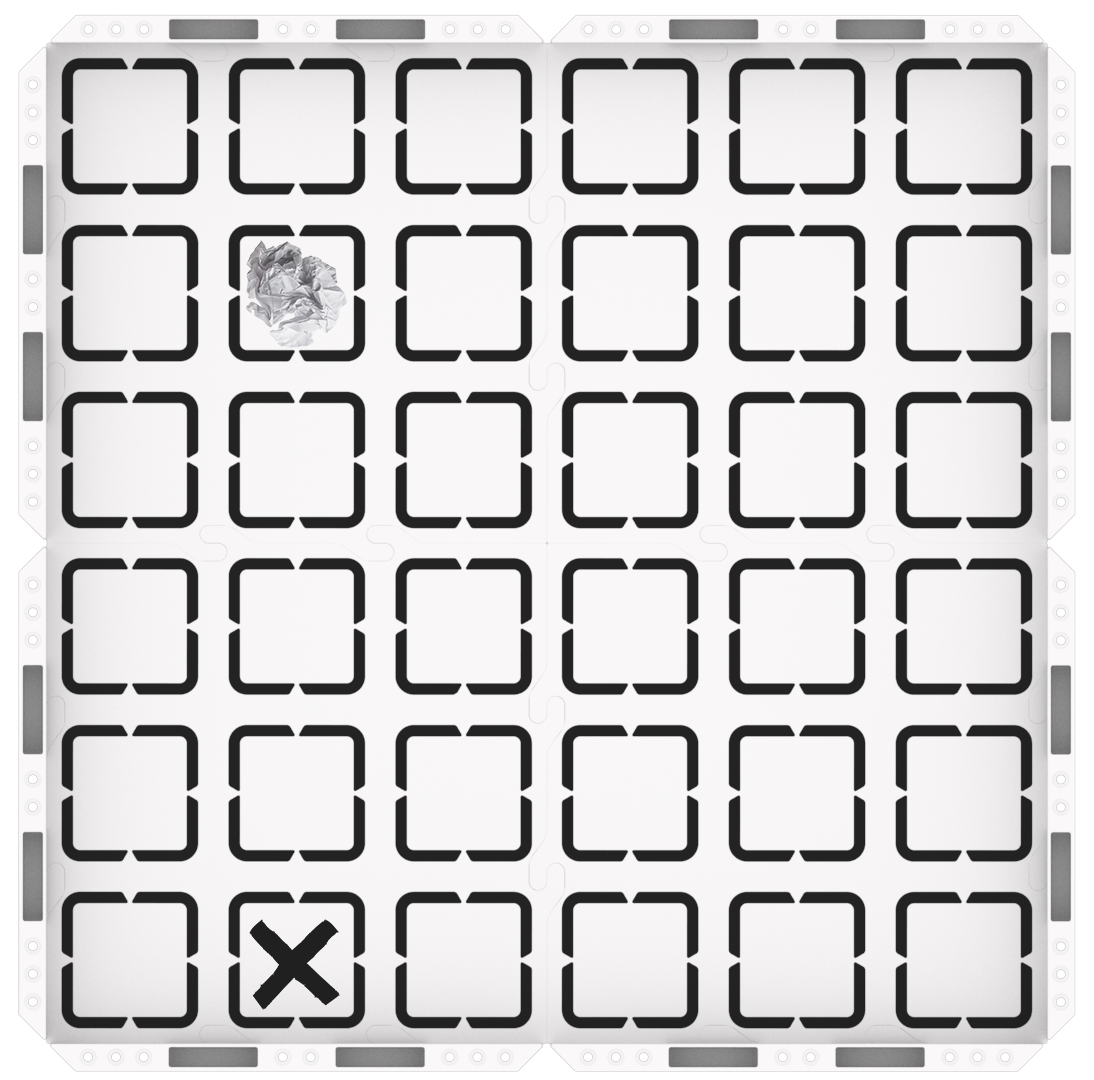
123 Configuration du champ -
Assurez-vous que le capteur oculaire, situé à l'avant du robot, fait face à l'obstacle.
Le capteur oculaire fait face à un obstacle
-
-
Une fois le robot 123 placé sur le terrain, demandez aux élèves de sélectionner « Démarrer » dans VEXcode 123 pour tester leurs projets.
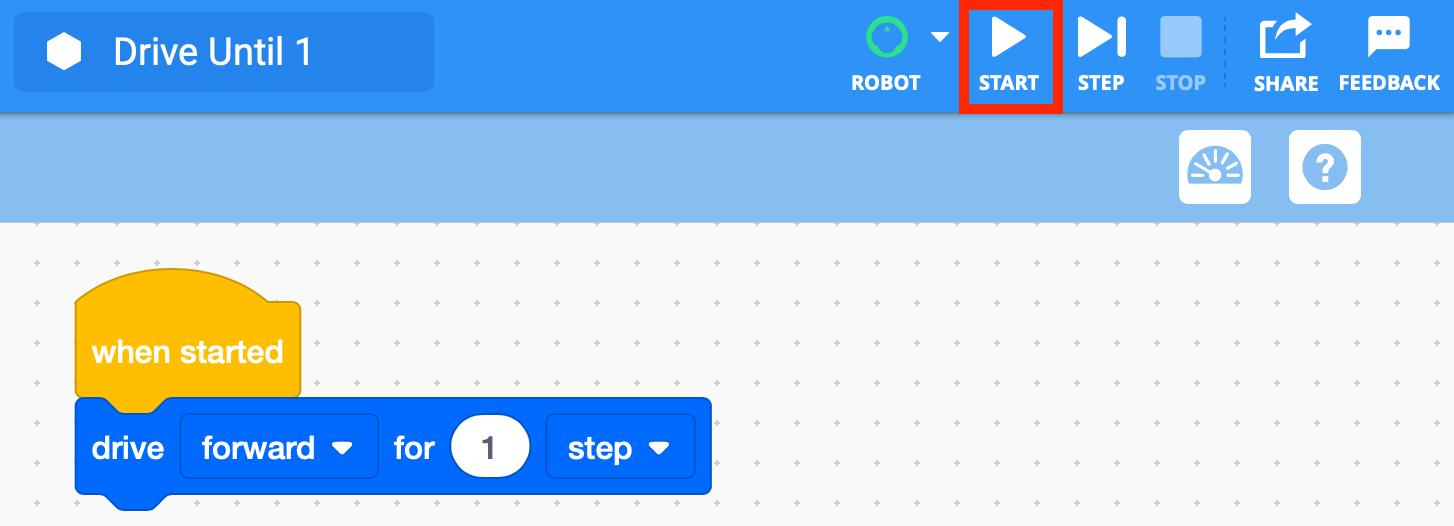
Sélectionnez « Démarrer » pour tester le projet -
Une fois le projet terminé, les élèves devront sélectionner le bouton « Arrêter » dans la barre d'outils.
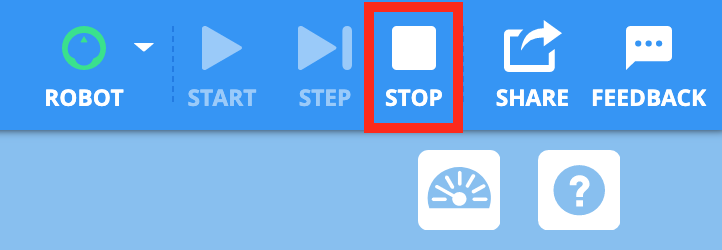
Sélectionnez Arrêter. - Pour les groupes qui finissent tôt et qui ont besoin de défis supplémentaires, demandez-leur de déplacer l'obstacle vers un nouvel emplacement et de tester à nouveau leur projet.
- FaciliterFaciliter une conversation avec les élèves au fur et à mesure qu'ils testent leurs projets.
- Comment le robot 123 se déplace-t-il dans ce projet ? Pouvez-vous me montrer avec vos mains ?
- Comment le robot 123 a-t-il su quand s'arrêter ?
- Comment savez-vous quand il y a quelque chose devant vous ?
- Si vous étiez le robot 123, lequel de vos sens vous aiderait à [Conduire jusqu'à] un objet ?
- Rappelez aux élèves que même s'il s'agit d'un petit projet, ils peuvent faire des erreurs et qu'il peut falloir plus d'un essai pour que leur projet fonctionne avec succès. Afin d'encourager les élèves à accepter les erreurs en cours de route, posez des questions telles que :
- Quelle erreur avez-vous commise qui vous a appris quelque chose ?
- Quelle partie du laboratoire vous a fait réfléchir ?
- Était-il difficile d'aligner le robot mobile 123 de sorte que le capteur oculaire fasse face à l'objet ? Quelle stratégie avez-vous utilisée pour l'aligner ?
- Demandez aux élèves de nommer ou de décrire un appareil ou un objet qui, selon eux, utilise un capteur oculaire. Demandez-leur s'ils ont entendu parler d'un robot aspirateur ? Peuvent-ils décrire comment une commande « Drive until » pourrait fonctionner avec cet appareil ?
Discussion de & groupe à mi-parcours
Dès que chaque groupe a terminé de tester ses projets, réunissez-vous pour une brève conversation.
- Projetez votre écran pour que tous les élèves puissent voir le code ou amenez-les dans une zone centrale où ils peuvent tous voir le code sur votre tablette ou votre ordinateur.
- Démarrez le projet Drive Until 1 et demandez aux élèves de regarder le code pendant le déroulement du projet et de décrire ce qu'ils voient. Demandez aux élèves de décrire ce qui se passe avec la fonction de surbrillance et d'identifier qu'elle reste sur le bloc [Drive until] jusqu'à ce que le capteur oculaire détecte un objet.
- Comment se déplace la surbrillance verte lorsque nous commençons notre projet ?
- Pourquoi pensez-vous que le surlignage vert s'arrête sur le bloc [Drive until] ?
- Que pensez-vous que le point culminant nous dit ?
Partie 2 - Étape par étape
- InstruireInstruire les élèves qu'ils ajouteront à leur projet afin que le robot 123 signale lorsque le capteur oculaire a détecté un obstacle dans la zone d'atterrissage sur Mars. Les élèves ajouteront des blocs [Glow] et [Wait] à leur projet pour créer un effet de signal. Au fur et à mesure qu'ils testent leurs projets, ils suppriment l'obstacle lorsque le robot brille. L'animation ci-dessous montre comment le rover 123 Robot se déplacera au démarrage du projet. Une fois que le robot 123 brille, les élèves devront retirer l'obstacle du champ 123. Cela est également montré dans l'animation.
Fichier vidéo
- ModèleModèle pour les étudiants comment construire sur leur projet VEXcode 123 existant et le tester sur le terrain.
- Si les étudiants doivent ouvrir leur projet Drive Until 1, modélisez les étapes spécifiques à l'appareil, comme indiqué dans les articles de la bibliothèque VEX dans la section Ouvrir et enregistrer.
-
Demandez aux élèves d'ajouter des blocs à leurs projets VEXcode 123 pour recréer le code dans l'image ci-dessous. Les nouveaux blocs auront le 123 Robot vert pendant 2 secondes pour signaler qu'il détecte un objet. La case rouge indique les nouveaux blocs qui doivent être ajoutés au projet.

Conduire jusqu'à 2 projet - Le bloc [Glow] réglé sur vert rendra le voyant lumineux au centre du robot 123 vert.
- Le bloc [Attendre] attend un certain temps avant de passer au bloc suivant.
- Le bloc [Glow] réglé sur OFF arrêtera l'effet de lueur.
- Une fois que les étudiants ont construit leur projet, demandez-leur de nommer leur projet Drive Until 2 et de l'enregistrer sur leur appareil. Consultez la section Ouvrir et enregistrer de la bibliothèque VEXcode 123 VEX pour connaître les étapes spécifiques à l'appareil pour enregistrer un projet VEXcode 123.
-
Rappelez aux élèves comment placer leur robot 123 sur le terrain pour tester leur projet.
123 Configuration du champ - Assurez-vous que le capteur oculaire, situé à l'avant du robot, fait face à l'obstacle.
- Assurez-vous que le capteur oculaire, situé à l'avant du robot, fait face à l'obstacle.
-
Ensuite, sélectionnez « Démarrer » dans VEXcode 123 pour tester leurs projets.
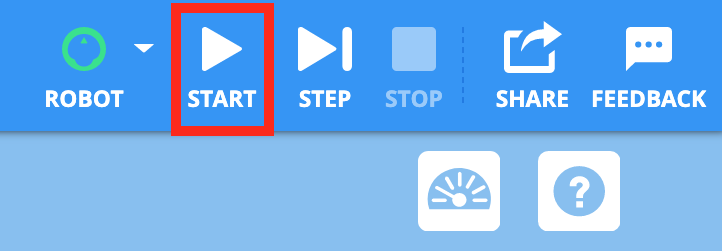
Sélectionnez « Démarrer » pour tester le projet - Après que le robot 123 ait conduit jusqu'à ce qu'il détecte l'obstacle, il devrait s'allumer en vert pendant deux secondes pour signaler qu'il détecte un objet. Les élèves doivent retirer l'objet lorsque le robot 123 s'allume en vert.
-
Rappelez aux élèves qu'ils devront sélectionner le bouton « Arrêter » dans la barre d'outils après avoir retiré l'objet.
Sélectionnez Arrêter. - Si les élèves finissent de construire et de tester leurs projets rapidement, demandez-leur d'ajouter un [Play sound] à leur projet pour signaler que l'objet a été retiré de la zone d'atterrissage. Encouragez-les à expérimenter avec les différents sons qu'ils peuvent faire faire au 123 Robot avec ce bloc.
- FaciliterFaciliter les étudiants à tester leurs projets et à se relayer sur le terrain 123. Pendant que les élèves testent, posez-leur des questions sur le capteur oculaire et sur la façon dont le robot 123 se déplacera en fonction des blocs de leur projet.
- Comment votre robot 123 va-t-il signaler qu'il a détecté un objet ?
- À quelle distance de l'obstacle se trouve le robot 123 lorsqu'il arrête de conduire ? Pouvez-vous me montrer avec vos mains ?
- Quels blocs de notre projet indiquent au robot 123 d'arrêter de conduire ?
- RappelerRappelez aux élèves qu'ils doivent vérifier leur projet et le comparer à l'image du projet.
- Cela peut être fait au sein d'un groupe - si un étudiant a construit le projet dans VEXcode 123, son partenaire peut vérifier le code, avant de placer le robot 123 et de démarrer le projet.
-
Ou, vous pouvez jumeler des groupes pour en faire une activité amusante où les groupes peuvent vérifier les projets les uns des autres pour s'assurer que leurs blocs correspondent tous. "Je vois un bloc [Drive until] sous le {When started} bloc." Votre groupe en a-t-il aussi ? Génial !

Votre code correspond-il ?
- Demandez aux étudiants, comment les scientifiques explorent-ils des endroits lointains ?
Les scientifiques et les ingénieurs conçoivent différents types de robots pour explorer des zones trop éloignées ou trop dangereuses pour les humains. Les scientifiques conçoivent des rovers pour explorer Mars, des sous-marins sans pilote pour explorer l'océan et même des drones dans des volcans actifs pour recueillir des données !
- Comment les scientifiques pourraient-ils coder un sous-marin pour utiliser des capteurs oculaires avec une commande « Drive until » pour explorer l'océan ?
- Comment les scientifiques pourraient-ils utiliser des capteurs oculaires sur un drone pour aider à explorer un volcan ? Quelle commande utiliseraient-ils pour faire voler le drone jusqu'à ce qu'il soit près des parois du volcan ?
- Quelles autres tâches les scientifiques pourraient-ils coder un rover martien à l'aide d'une commande « drive until » ?