
Afspelen
Deel 1 - Stap voor stap
- InstrueerInstrueer studenten dat ze een project in VEXcode 123 gaan bouwen om de 123 Robot te besturen totdat deze een object op het Mars-landingsgebied (het 123-veld) detecteert. Bekijk de onderstaande animatie om de robotaandrijving te zien totdat deze het obstakel bereikt zodra het project is gestart. Zorg ervoor dat u lichte of witgekleurde objecten gebruikt om de "obstakels" op het landingsterrein weer te geven om ervoor te zorgen dat de oogsensor deze objecten detecteert.
Videobestand
- ModelModel voor studenten hoe een project te bouwen en te testen in VEXcode 123.
- Begin met leerlingen te laten zien hoe ze hun 123 Robots kunnen verbinden met hun apparaat in VEXcode 123. Omdat verbindingsstappen variëren tussen apparaten, zie de Verbindingsartikelen van de VEXcode 123 VEX-bibliotheek voor specifieke stappen om de 123 Robot aan te sluiten op uw computer of tablet.
-
Sleep een [Drive until] -blok naar de werkruimte en bevestig het aan het {When started} blok.
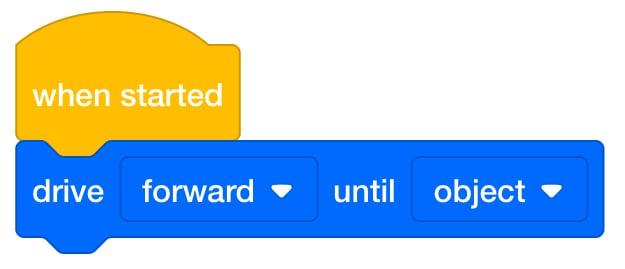 [Rijden tot] blok
[Rijden tot] blok toevoegen - Zodra studenten hun project hebben gebouwd, moeten ze hun project een naam geven als Drive Until 1 en het op hun apparaat opslaan. Zie het gedeelte Openen en opslaan van de VEXcode 123 VEX-BIBLIOTHEEK voor apparaatspecifieke stappen om een VEXcode 123-project op te slaan.
- Model voor studenten hoe ze hun project op het veld kunnen testen.
-
Laat ze eerst zien hoe ze de 123 Robot op het vierkant met de"X" kunnen plaatsen.
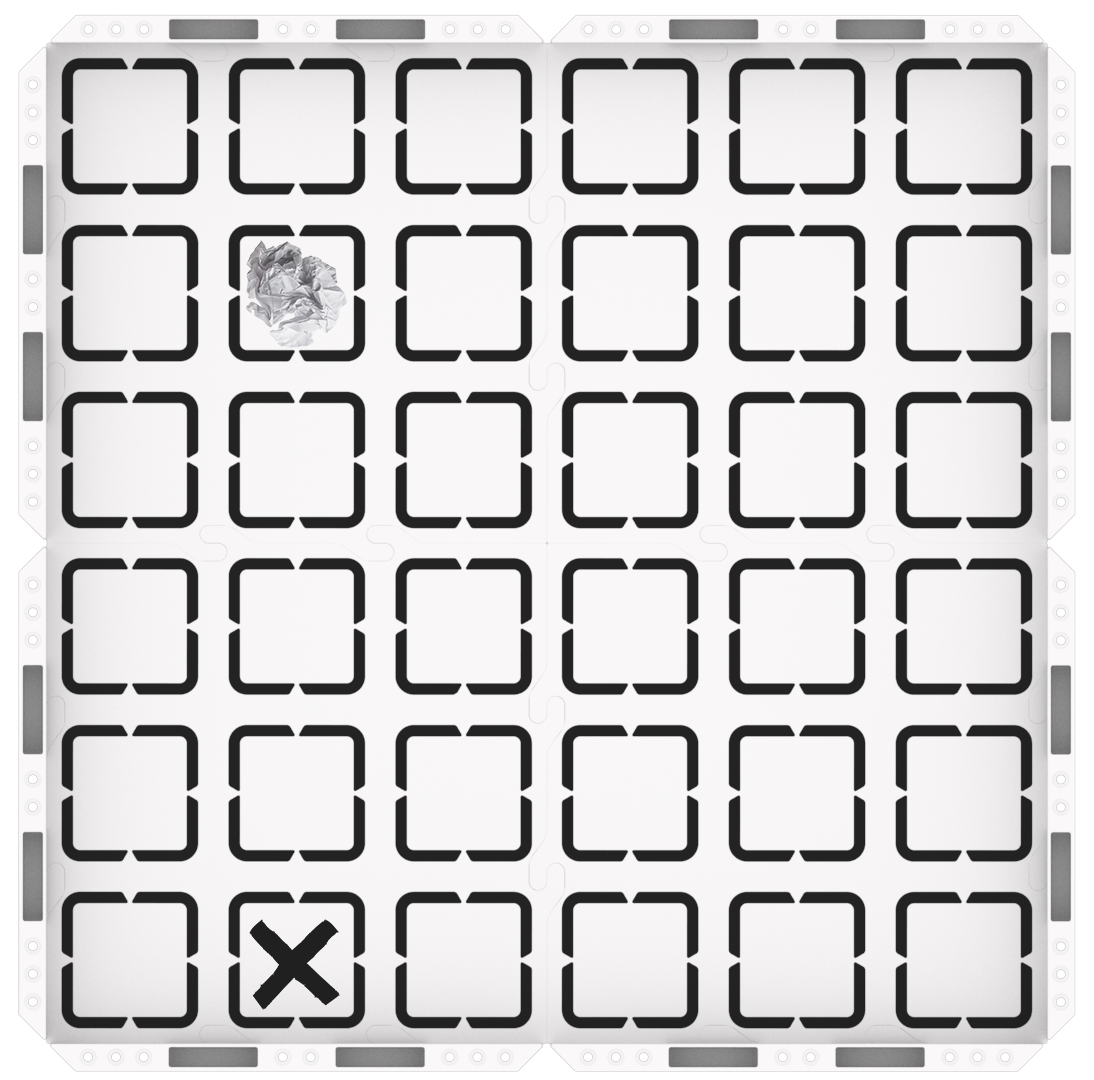
123 veldinstellingen -
Zorg ervoor dat de oogsensor, die zich aan de voorkant van de robot bevindt, naar het obstakel is gericht.
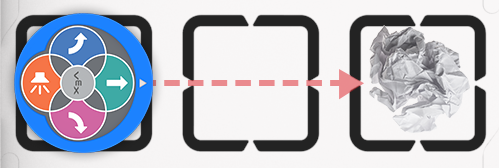
Oogsensor staat voor obstakel
-
-
Zodra de 123 Robot op het Veld is geplaatst, laat de leerlingen ‘Start‘ selecteren in VEXcode 123 om hun projecten te testen.

Selecteer ‘Start’ om het project te testen -
Nadat het project is voltooid, moeten studenten de knop "Stoppen" in de werkbalk selecteren.

Selecteer Stoppen. - Voor groepen die vroeg klaar zijn en extra uitdagingen nodig hebben, laat ze het obstakel naar een nieuwe locatie verplaatsen en hun project opnieuw testen.
- FaciliterenFaciliteren van een gesprek met studenten terwijl ze hun projecten testen.
- Hoe beweegt de 123 Robot in dit project? Kun je het me met je handen laten zien?
- Hoe wist de 123 Robot wanneer hij moest stoppen?
- Hoe weet je wanneer er iets voor je ligt?
- Als u de 123 Robot was, welke van uw zintuigen zou u dan helpen [te rijden tot] een object?
- Herinner studenten eraan dat hoewel dit een klein project is, ze fouten kunnen maken en dat het meer dan één poging kan kosten om hun project met succes te laten werken. Om studenten aan te moedigen de fouten onderweg te omarmen, stel je vragen zoals:
- Welke fout heb je gemaakt die je iets heeft geleerd?
- Welk deel van het Lab zette je aan het denken?
- Was het moeilijk om de 123 Robotrover zo in lijn te brengen dat de Oogsensor naar het object keek? Welke strategie heb je gebruikt om het op elkaar af te stemmen?
- VraagVraag leerlingen om een apparaat of object te benoemen of te beschrijven waarvan ze denken dat het een oogsensor gebruikt. Vraag hen of ze hebben gehoord van een robotstofzuiger? Kunnen ze beschrijven hoe een "Drive until" -opdracht met dit apparaat zou kunnen werken?
Mid-Play Break & Groepsdiscussie
Zodra elke groep klaar is met het testen van hun projecten, kom je samen voor een kort gesprek.
- Projecteer je scherm zodat alle studenten de code kunnen zien, of breng studenten naar een centraal gebied waar ze de code allemaal op je tablet of computer kunnen zien.
- Start het project Drive Until 1 en vraag studenten om de code te bekijken terwijl het project wordt uitgevoerd en te beschrijven wat ze zien. Leid studenten om te beschrijven wat er gebeurt met de markeringsfunctie en identificeer dat deze op het [Drive totdat] blok blijft totdat de oogsensor een object detecteert.
- Hoe beweegt het groene hoogtepunt wanneer we aan ons project beginnen?
- Waarom denk je dat de groene markering op het blok [Rijden tot] pauzeert?
- Wat denk je dat het hoogtepunt ons vertelt?
Deel 2 - Stap voor stap
- InstrueerInstrueer studenten dat ze aan hun project zullen toevoegen, zodat de 123 Robot signaleert wanneer de Oogsensor een obstakel in het Marslandingsgebied heeft gedetecteerd. Studenten voegen [Glow] - en [Wait] -blokken toe aan hun project om een signaaleffect te creëren. Terwijl ze hun projecten testen, zullen ze het obstakel verwijderen wanneer de robot gloeit. De onderstaande animatie laat zien hoe de 123 Robot rover zal bewegen wanneer het project wordt gestart. Zodra de 123 Robot gloeit, moeten studenten het obstakel uit het 123 Veld verwijderen. Dit is ook te zien in de animatie.
Videobestand
- ModelModel voor studenten hoe ze kunnen voortbouwen op hun bestaande VEXcode 123-project en het op het veld kunnen testen.
- Als studenten hun Drive Until 1-project moeten openen, modelleer dan de apparaatspecifieke stappen, zoals weergegeven in de VEX-bibliotheekartikelen in het gedeelte Openen en opslaan.
-
Laat leerlingen blokken toevoegen aan hun VEXcode 123-projecten om de code in de onderstaande afbeelding opnieuw te maken. De nieuwe blokken zullen de 123 Robot gedurende 2 seconden groen laten gloeien om aan te geven dat het een object detecteert. Het rode vak geeft nieuwe blokken aan die aan het project moeten worden toegevoegd.

Aandrijving tot project 2 - Het [Glow] blok ingesteld op groen zal het indicatielampje in het midden van de 123 Robot groen laten gloeien.
- Het [Wait] -blok wacht een bepaalde tijd voordat het naar het volgende blok gaat.
- Het [Glow] blok dat is ingesteld op off stopt het gloei-effect.
- Zodra studenten hun project hebben gebouwd, moeten ze hun project een naam geven als Drive Until 2 en het op hun apparaat opslaan. Zie het gedeelte Openen en opslaan van de VEXcode 123 VEX-BIBLIOTHEEK voor apparaatspecifieke stappen om een VEXcode 123-project op te slaan.
-
Herinner studenten eraan hoe ze hun 123 Robot op het veld kunnen plaatsen om hun project te testen.
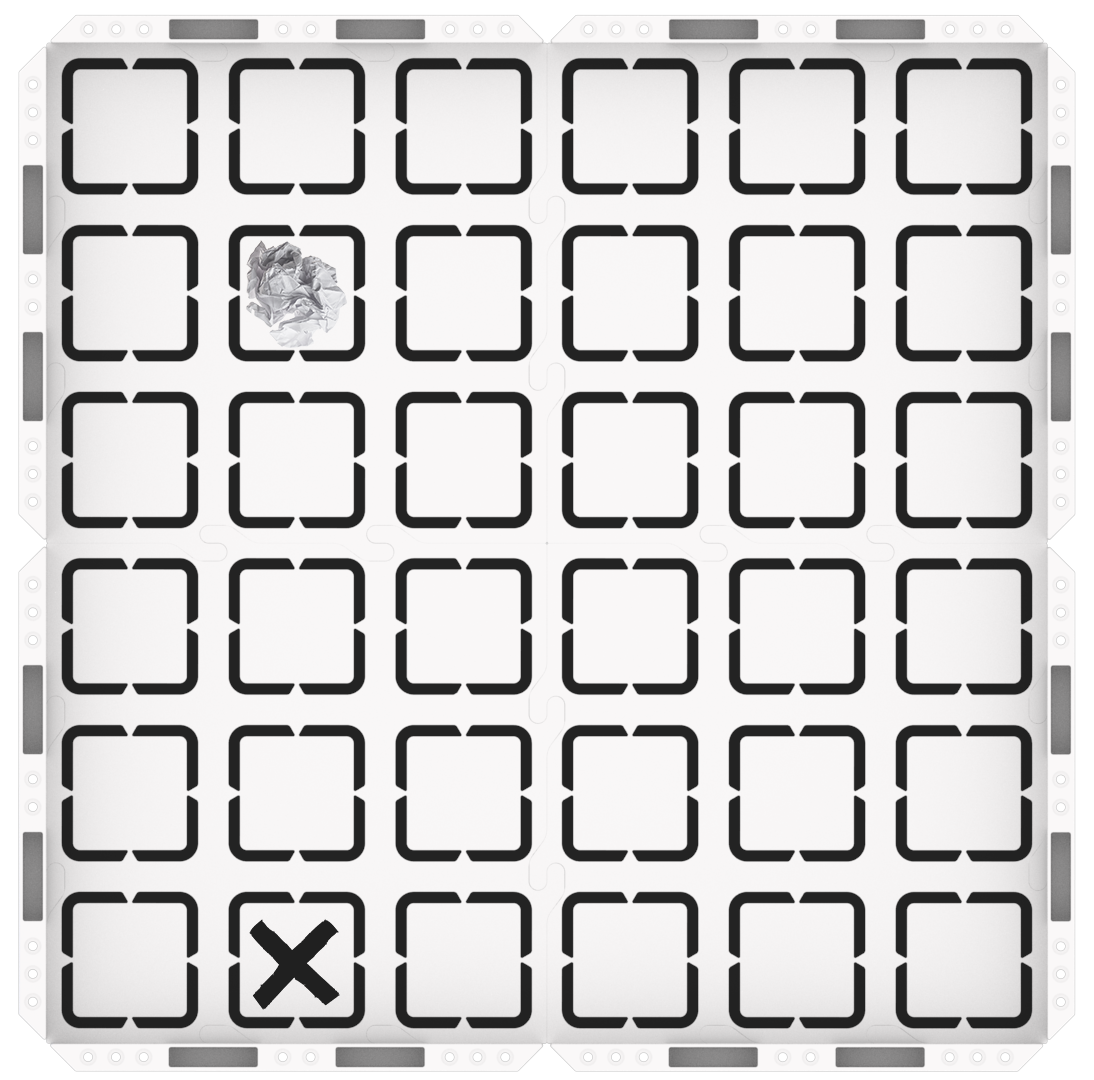
123 veldinstellingen - Zorg ervoor dat de oogsensor, die zich aan de voorkant van de robot bevindt, naar het obstakel is gericht.
- Zorg ervoor dat de oogsensor, die zich aan de voorkant van de robot bevindt, naar het obstakel is gericht.
-
Selecteer vervolgens ‘Start‘ in VEXcode 123 om hun projecten te testen.

Selecteer ‘Start’ om het project te testen - Nadat de 123 Robot rijdt totdat hij het obstakel detecteert, moet hij gedurende twee seconden groen oplichten om aan te geven dat hij een object detecteert. Leerlingen moeten het object verwijderen wanneer de 123 Robot groen oplicht.
-
Herinner studenten eraan dat ze de knop "Stoppen" in de werkbalk moeten selecteren nadat ze het object hebben verwijderd.

Selecteer Stoppen. - Als studenten snel klaar zijn met het bouwen en testen van hun projecten, laat ze dan een [Geluid afspelen] aan hun project toevoegen om aan te geven dat het object uit het landingsterrein is verwijderd. Moedig ze aan om te experimenteren met de verschillende geluiden die ze met dit blok kunnen laten maken door de 123 Robot.
- FaciliterenFaciliteren van studenten die hun projecten testen en om de beurt het 123-veld gebruiken. Stel tijdens het testen vragen over de oogsensor en hoe de 123 Robot zal bewegen op basis van de blokken in hun project.
- Hoe gaat uw 123 Robot signaleren dat hij een object heeft gedetecteerd?
- Hoe ver weg van het obstakel is de 123 Robot als hij stopt met rijden? Kun je het me met je handen laten zien?
- Welke blokken in ons project vertellen de 123 Robot om te stoppen met rijden?
- Herinner studenten eraan dat ze hun project moeten controleren en vergelijken met het imago van het project.
- Dit kan binnen een groep - als één student het project in VEXcode 123 heeft gebouwd, kan hun partner de code controleren, voordat de 123 Robot wordt geplaatst en het project wordt gestart.
-
Of je kunt groepen koppelen om er een leuke activiteit van te maken, waarbij groepen elkaars projecten kunnen controleren om ervoor te zorgen dat hun blokken allemaal overeenkomen. “I see a [Drive until] block under the {When started} block.” Heeft jouw groep dat ook? Geweldig!

Komt je code overeen?
- VraagVraag het aan studenten, hoe verkennen wetenschappers verre plaatsen?
Wetenschappers en ingenieurs ontwerpen verschillende soorten robots om gebieden te verkennen die te ver weg of te gevaarlijk zijn voor mensen om te onderzoeken. Wetenschappers ontwerpen rovers om Mars te verkennen, onbemande onderzeeërs om de oceaan te onderzoeken en vliegen zelfs drones in actieve vulkanen om gegevens te verzamelen!
- Hoe konden wetenschappers een onderzeeër coderen om oogsensoren met een "drive until" -commando te gebruiken om de oceaan te verkennen?
- Hoe kunnen wetenschappers oogsensoren op een drone gebruiken om een vulkaan te verkennen? Welk commando zouden ze gebruiken om de drone te laten vliegen totdat deze in de buurt van de vulkaanmuren is?
- Welke andere taken kunnen wetenschappers een Mars-rover coderen om te doen met een "rijden tot" -commando?