
Coinvolgere
Avvia la sezione Coinvolgimento
ATTI è ciò che l'insegnante farà e CHIEDE in che modo l'insegnante faciliterà.
| ATTI | CHIEDE |
|---|---|
|
|
Coinvolgere
-
IstruisciIstruisci
gli studenti che aiuteranno l'insegnante a costruire e testare un progetto VEXcode 123, per
far sì che il sensore oculare sul robot 123 rilevi un ostacolo nell'area di atterraggio su
Marte. Per fare ciò, utilizzeranno il blocco [Drive until].
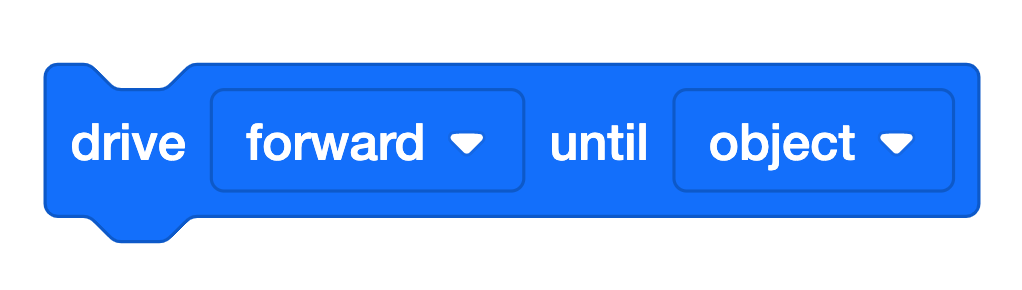 Blocco
Blocco [Drive until] -
DistribuisciDistribuisci
un robot 123, un computer o tablet per accedere a VEXcode 123 e un campo 123 con la
posizione di partenza contrassegnata e l'ostacolo in posizione, per la dimostrazione.
Utilizzare una carta o un oggetto di colore chiaro o bianco per l '"ostacolo". Il sensore
oculare utilizza la luce infrarossa per rilevare gli oggetti e, poiché gli oggetti di colore
scuro assorbono la luce infrarossa, è difficile per il sensore oculare rilevarli. Gli
studenti raccoglieranno i loro 123 robot e dispositivi al termine della dimostrazione.
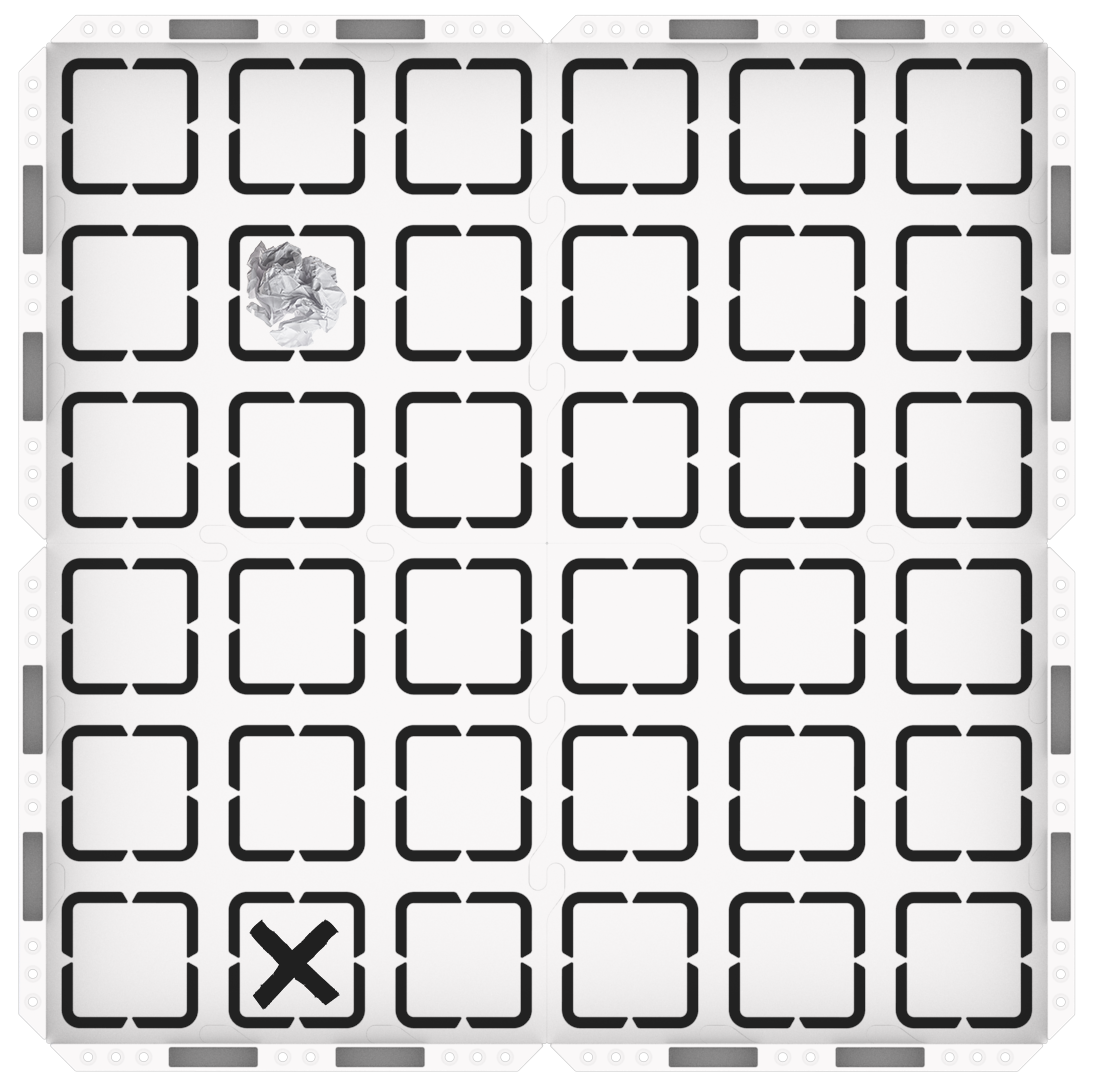
123 Impostazione del campo -
Riattivare il Robot 123, come mostrato nell'animazione sottostante, e posizionarlo sulla posizione di partenza, di fronte all'ostacolo, sul Campo 123. Si noti che questa animazione include il suono.
File video - Collegare il Robot 123 al computer o tablet. Per supporto nel collegamento del Robot 123 al computer o tablet, consultare gli articoli specifici del dispositivo in questa sezione della Libreria VEX.
-
-
FacilitareFacilitare la
costruzione e la sperimentazione del progetto con gli studenti, utilizzando VEXcode 123.
Trascinare il blocco [Drive until] nell'Area di lavoro e collegarlo al {When started} blocco.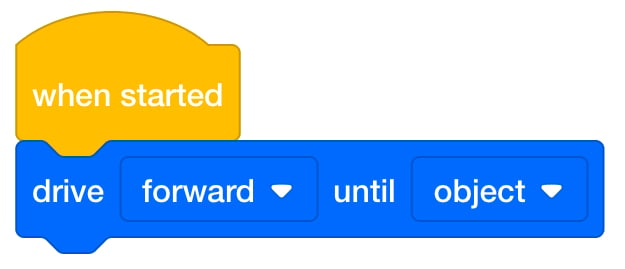
Aggiungi [Drive until] Blocca -
Avvia il progetto e chiedi agli studenti di osservare il comportamento del Robot 123. Visualizza l'animazione qui sotto per vedere il robot guidare fino a raggiungere l'ostacolo una volta avviato il progetto.
File video - Durante il test del progetto, fai domande su come funziona il sensore oculare in questa situazione. Come pensi che il sensore oculare possa rilevare l'ostacolo? E se spostassimo il robot 123, cosa pensi che succederebbe?
- Riavviare il progetto più volte e spostare il Robot 123 in posizioni diverse, più vicine o più lontane dall'ostacolo, o non sul percorso dell'ostacolo. Assicurati di sottolineare che il sensore oculare deve affrontare gli ostacoli per rilevarli con successo.
-
- OffertaOffri un rinforzo positivo per l'osservazione, l'ascolto e l'autoregolazione degli studenti durante la dimostrazione.

Risoluzione dei problemi dell'insegnante
- Se hai problemi a rilevare un ostacolo, prova a utilizzare carta o oggetti di colore chiaro come ostacoli. Il sensore oculare utilizza la luce infrarossa per rilevare gli oggetti e, poiché gli oggetti di colore scuro assorbono la luce infrarossa, rende molto difficile per il sensore oculare rilevarli.
- Assicurati che gli studenti ripristinino gli ostacoli - Dopo che ogni gruppo ha testato il proprio progetto sul Campo 123, assicurati che rimettano gli ostacoli in posizione per il gruppo successivo. È possibile contrassegnare le posizioni degli ostacoli con un pennarello cancellabile a secco sul campo, per facilitare questo processo.
Strategie di facilitazione
- Fai a turno - Durante tutto il laboratorio, gli studenti dovrebbero fare a
turno nei loro gruppi. I suggerimenti per facilitare questo includono:
- Alternare tra la creazione del codice in VEXcode 123 e il posizionamento del Robot 123 sul Campo e l'avvio del progetto. Gli studenti possono scambiare i ruoli con il loro partner tra Gioca parte 1 e Gioca parte 2, in modo che entrambi i membri del gruppo abbiano la possibilità di utilizzare il computer o il tablet.
- Identifica all'inizio del gioco come funzionerà il turno, in modo che gli studenti possano essere preparati per quando avranno un turno con il computer o il tablet e quando il loro turno sarà finito.
- Prova una nuova posizione di partenza - Se gli studenti rilevano subito l'ostacolo nella Parte 1 del Gioco, chiedi loro di spostare il Robot 123 in una nuova posizione di partenza e riprova, per sperimentare di più con il rilevamento degli oggetti. Il sensore oculare rileva ancora lo stesso ostacolo? Rileva qualcosa di diverso? Perché pensano che sia così?