
Phát
Phần 1 - Từng bước
- Hướng dẫn học sinh rằng họ sẽ xây dựng một dự án trong VEXcode 123 để lái Robot 123 cho đến khi nó phát hiện một vật thể trên khu vực hạ cánh của sao Hỏa (Trường 123). Xem hình ảnh động bên dưới để xem quá trình lái robot cho đến khi nó đạt đến chướng ngại vật sau khi dự án được bắt đầu. Đảm bảo sử dụng các vật thể có màu sáng hoặc màu trắng để thể hiện "chướng ngại vật" trên khu vực hạ cánh để đảm bảo Cảm biến mắt sẽ phát hiện các vật thể này.
Tệp video
- Mô hình cho sinh viên cách xây dựng và thử nghiệm một dự án trong VEXcode 123.
- Bắt đầu bằng cách chỉ cho học sinh cách kết nối 123 Robot với thiết bị của họ trong VEXcode 123. Vì các bước kết nối khác nhau giữa các thiết bị, hãy xem các bài viết Kết nối của Thư viện VEXcode 123 VEX để biết các bước cụ thể để kết nối 123 Robot với máy tính hoặc máy tính bảng của bạn.
-
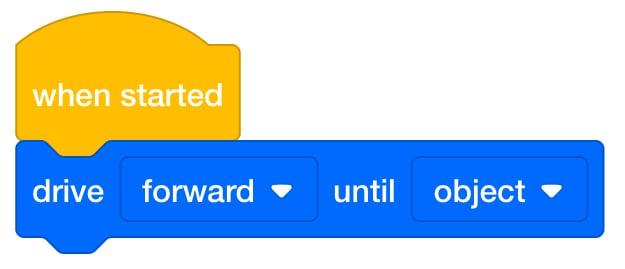
Kéo khối [Drive until] vào không gian làm việc và gắn nó vào {When started} khối.
Thêm khối [Drive until] - Khi học viên đã xây dựng dự án của mình, hãy yêu cầu các em đặt tên dự án là Drive Until 1 và lưu nó vào thiết bị của mình. Xem phần Mở và Lưu của Thư viện VEXcode 123 VEX để biết các bước dành riêng cho thiết bị để lưu dự án VEXcode 123.
- Mô hình cho sinh viên cách kiểm tra dự án của họ trên thực địa.
-
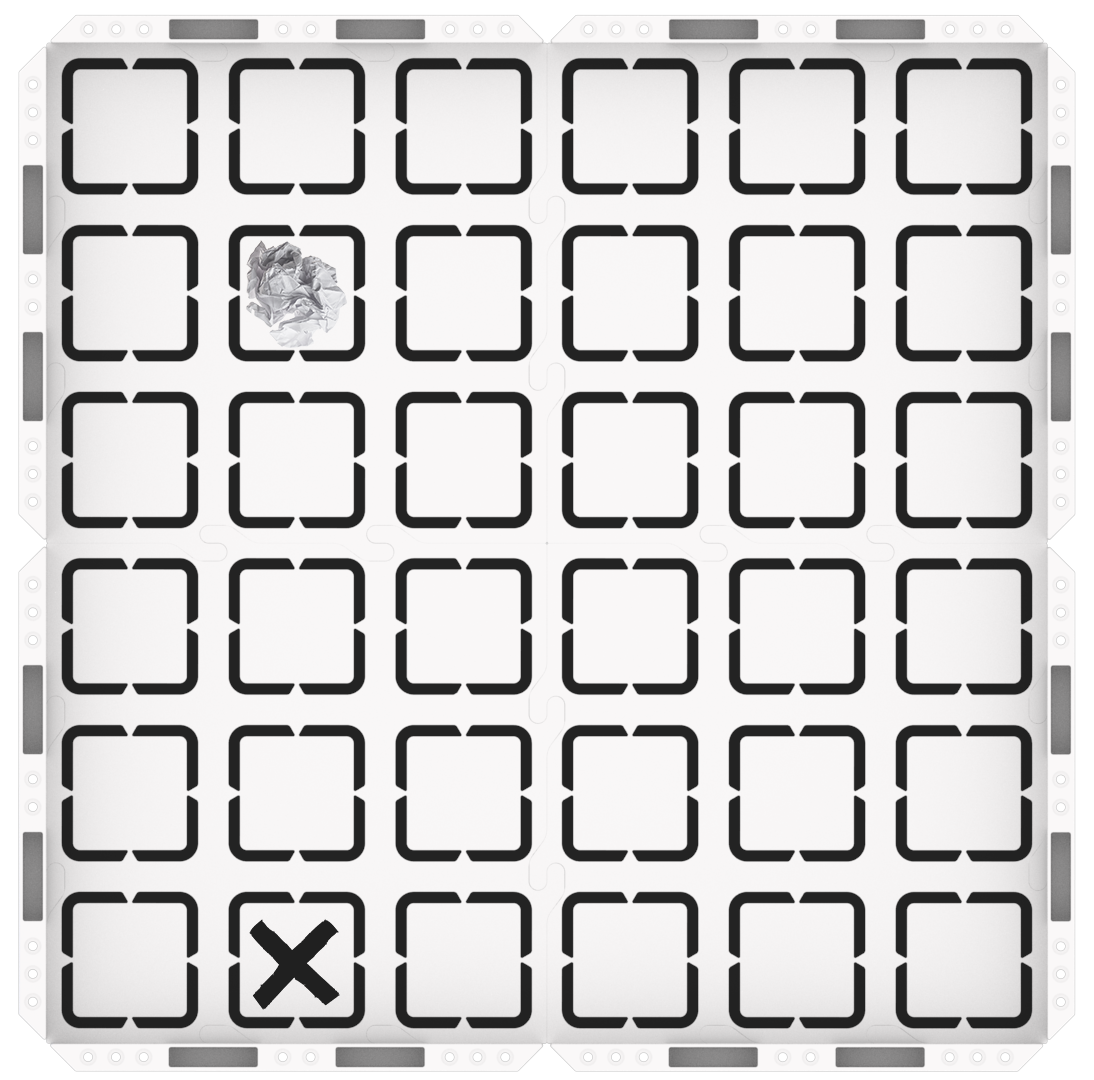
Đầu tiên, chỉ cho họ cách đặt Robot 123 trên hình vuông với "X."
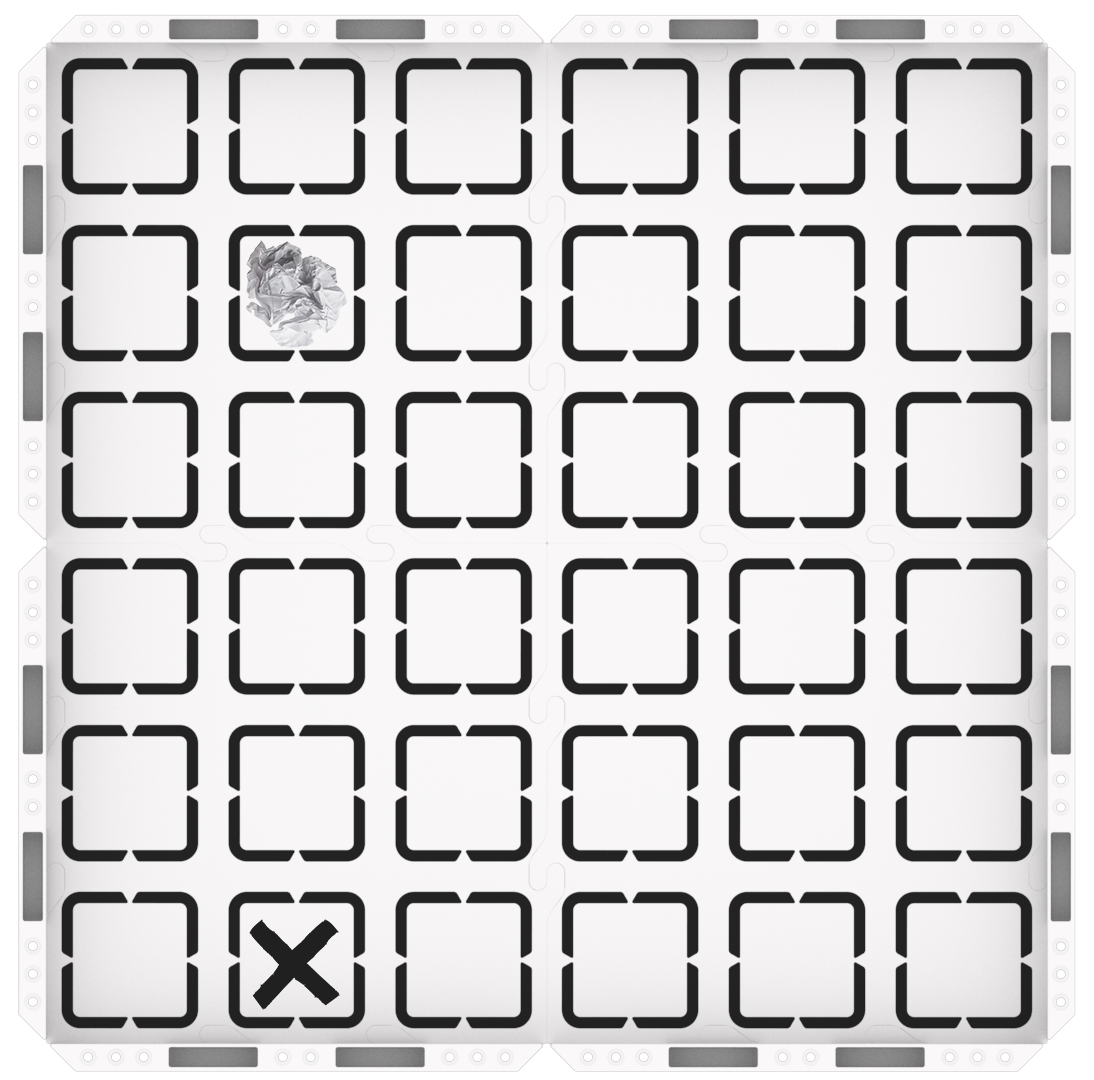
123 Thiết lập trường -
Đảm bảo rằng Cảm biến Mắt, nằm ở mặt trước của robot, đang đối mặt với chướng ngại vật.
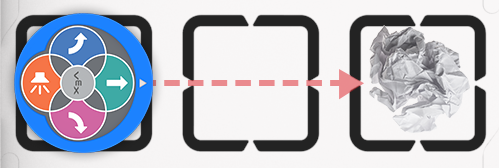 Cảm biến
Cảm biến mắt phải đối mặt với trở ngại
-
-
Khi Robot 123 được đặt trên sân, yêu cầu học sinh chọn ‘Bắt đầu‘ trong VEXcode 123 để kiểm tra các dự án của họ.

Chọn ‘Bắt đầu’ để kiểm tra dự án -
Sau khi dự án hoàn thành, học sinh sẽ cần chọn nút “Dừng” trên Thanh công cụ.

Chọn “Dừng” - Đối với các nhóm hoàn thành sớm và cần thêm thử thách, hãy yêu cầu họ di chuyển chướng ngại vật đến một địa điểm mới và thử nghiệm lại dự án của họ.
- Tạo điều kiệnthuận lợi Tạo điều kiện cho một cuộc trò chuyện với học sinh khi các em kiểm tra các dự án của mình.
- Robot 123 di chuyển trong dự án này như thế nào? Bạn có thể chỉ cho tôi bằng tay không?
- Làm thế nào mà 123 Robot biết khi nào nên dừng lại?
- Làm thế nào để bạn biết khi nào có thứ gì đó trước mặt bạn?
- Nếu bạn là 123 Robot, giác quan nào của bạn sẽ giúp bạn [Lái xe cho đến khi] một vật thể?
- Nhắc nhở học viên rằng mặc dù đây là một dự án nhỏ, các em có thể mắc sai lầm và có thể mất nhiều hơn một lần cố gắng để dự án của các em thành công. Để khuyến khích học sinh nắm bắt những sai lầm trên đường đi, hãy đặt các câu hỏi như:
- Em đã mắc sai lầm nào mà đã dạy cho em điều gì đó?
- Phần nào của Phòng thí nghiệm khiến bạn phải suy nghĩ kỹ?
- Có khó khăn khi xếp hàng robot tự hành 123 sao cho Cảm biến mắt phải đối mặt với vật thể không? Bạn đã sử dụng chiến lược nào để sắp xếp nó?
- Yêu cầu học viên nêu tên hoặc mô tả một thiết bị hoặc đồ vật mà các em nghĩ rằng sử dụng cảm biến mắt. Hỏi họ xem họ đã nghe nói về máy hút bụi robot chưa? Họ có thể mô tả cách lệnh "Lái xe đến" có thể hoạt động với thiết bị này không?
Thảo luận giữa giờ nghỉ giải lao & theo nhóm
Ngay sau khi mỗi nhóm đã hoàn thành thử nghiệm các dự án của họ, hãy cùng nhau trò chuyện ngắn gọn.
- Chiếu màn hình của bạn để tất cả học sinh có thể xem mã hoặc đưa học sinh đến một khu vực trung tâm nơi tất cả các em có thể xem mã trên máy tính bảng hoặc máy tính của bạn.
- Bắt đầu dự án Drive Until 1 và yêu cầu sinh viên xem mã khi dự án chạy và mô tả những gì họ nhìn thấy. Hướng dẫn học viên mô tả những gì xảy ra với tính năng nổi bật và xác định rằng nó vẫn ở trên khối [Drive until] cho đến khi Cảm biến Mắt phát hiện một vật thể.
- Điểm nhấn màu xanh lá cây di chuyển như thế nào khi chúng tôi bắt đầu dự án của mình?
- Bạn nghĩ tại sao điểm nhấn màu xanh lá cây tạm dừng trên khối [Lái xe cho đến]?
- Bạn nghĩ điểm nổi bật cho chúng ta biết điều gì?
Phần 2 - Từng bước
- Hướng dẫn học sinh rằng họ sẽ thêm vào dự án của mình để 123 Robot báo hiệu khi Cảm biến Mắt phát hiện ra chướng ngại vật trong khu vực hạ cánh trên sao Hỏa. Học sinh sẽ thêm các khối [Glow] và [Wait] vào dự án của mình để tạo hiệu ứng tín hiệu. Khi họ kiểm tra các dự án của mình, họ sẽ loại bỏ chướng ngại vật khi robot phát sáng. Hình ảnh động dưới đây cho thấy robot tự hành 123 sẽ di chuyển như thế nào khi dự án bắt đầu. Khi Robot 123 phát sáng, học sinh sẽ cần phải loại bỏ chướng ngại vật khỏi Sân 123. Điều này cũng được thể hiện trong hình ảnh động.
Tệp video
- Mô hình mô hình cho sinh viên cách xây dựng dựa trên dự án VEXcode 123 hiện có của họ và thử nghiệm nó trên hiện trường.
- Nếu sinh viên cần mở dự án Drive Until 1, hãy lập mô hình các bước dành riêng cho thiết bị, như được hiển thị trong các bài viết của Thư viện VEX trong phần Mở và Lưu.
-
Yêu cầu học sinh thêm các khối vào các dự án VEXcode 123 của mình để tạo lại mã trong hình dưới đây. Các khối mới sẽ có 123 Robot phát sáng màu xanh lá cây trong 2 giây để báo hiệu rằng nó phát hiện một vật thể. Hộp màu đỏ cho biết các khối mới cần được thêm vào dự án.

Lái xe đến 2 dự án - Khối [Phát sáng] được đặt thành màu xanh lá cây sẽ làm cho đèn báo ở trung tâm của 123 Robot phát sáng màu xanh lá cây.
- Khối [Wait] chờ một khoảng thời gian cụ thể trước khi chuyển sang khối tiếp theo.
- Khối [Phát sáng] được đặt thành tắt sẽ dừng hiệu ứng phát sáng.
- Khi học viên đã xây dựng dự án của mình, hãy yêu cầu các em đặt tên dự án là Drive Until 2 và lưu nó vào thiết bị của mình. Xem phần Mở và Lưu của Thư viện VEXcode 123 VEX để biết các bước dành riêng cho thiết bị để lưu dự án VEXcode 123.
-
Nhắc học sinh cách đặt Robot 123 của họ trên sân để kiểm tra dự án của họ.
123 Thiết lập trường - Đảm bảo rằng Cảm biến Mắt, nằm ở mặt trước của robot, đang đối mặt với chướng ngại vật.
- Đảm bảo rằng Cảm biến Mắt, nằm ở mặt trước của robot, đang đối mặt với chướng ngại vật.
-
Sau đó, chọn ‘Bắt đầu’ trong VEXcode 123 để kiểm tra các dự án của họ.

Chọn ‘Bắt đầu’ để kiểm tra dự án - Sau khi Robot 123 lái xe cho đến khi phát hiện ra chướng ngại vật, nó sẽ phát sáng màu xanh lá cây trong hai giây để báo hiệu rằng nó phát hiện một vật thể. Học sinh nên loại bỏ vật thể khi Robot 123 phát sáng màu xanh lá cây.
-
Nhắc học viên rằng các em sẽ cần chọn nút “Dừng” trên Thanh công cụ sau khi tháo đồ vật.

Chọn “Dừng” - Nếu học viên hoàn thành việc xây dựng và kiểm tra các đồ án của mình một cách nhanh chóng, hãy yêu cầu các em thêm [Phát âm thanh] vào đồ án của mình để báo hiệu rằng đồ vật đã được đưa ra khỏi khu vực hạ cánh. Khuyến khích các em thử nghiệm với các âm thanh khác nhau mà các em có thể yêu cầu Robot 123 tạo ra với khối này.
- Tạo điều kiệnthuận lợi Tạo điều kiện thuận lợi cho sinh viên kiểm tra các dự án của họ và thay phiên nhau trên Trường 123. Khi học sinh đang kiểm tra, hãy hỏi các em những câu hỏi về Cảm biến Mắt và cách Robot 123 sẽ di chuyển dựa trên các khối trong dự án của các em.
- Robot 123 của bạn sẽ báo hiệu rằng nó đã phát hiện ra một vật thể như thế nào?
- Robot 123 cách chướng ngại vật bao xa khi nó dừng lái xe? Bạn có thể chỉ cho tôi bằng tay không?
- Những khối nào trong dự án của chúng tôi yêu cầu Robot 123 ngừng lái xe?
- Nhắc nhở sinh viên rằng họ nên kiểm tra dự án của họ và so sánh nó với hình ảnh của dự án.
- Điều này có thể được thực hiện trong một nhóm - nếu một sinh viên xây dựng dự án trong VEXcode 123, đối tác của họ có thể kiểm tra mã, trước khi đặt Robot 123 và bắt đầu dự án.
-
Hoặc, bạn có thể ghép các nhóm để biến hoạt động này thành một hoạt động thú vị, nơi các nhóm có thể kiểm tra các dự án của nhau để đảm bảo tất cả các khối của họ đều khớp. "Tôi thấy một khối [Lái xe cho đến] bên dưới {When started} khối." Nhóm của bạn cũng có điều đó không? Tuyệt vời!

Mã của bạn có khớp không?
- Hỏi sinh viên, làm thế nào để các nhà khoa học khám phá những nơi xa xôi?
Các nhà khoa học và kỹ sư thiết kế các loại robot khác nhau để khám phá các khu vực quá xa hoặc quá nguy hiểm để con người điều tra. Các nhà khoa học thiết kế xe tự hành để khám phá sao Hỏa, tàu ngầm không người lái để điều tra đại dương và thậm chí điều khiển máy bay không người lái vào núi lửa đang hoạt động để thu thập dữ liệu!
- Làm thế nào các nhà khoa học có thể mã hóa một tàu ngầm để sử dụng cảm biến mắt với lệnh "lái xe cho đến khi" để khám phá đại dương?
- Làm thế nào các nhà khoa học có thể sử dụng cảm biến mắt trên máy bay không người lái để giúp khám phá núi lửa? Họ sẽ sử dụng lệnh nào để máy bay không người lái bay cho đến khi nó ở gần các bức tường núi lửa?
- Các nhà khoa học có thể mã hóa một chiếc xe tự hành sao Hỏa để làm gì với lệnh "lái cho đến khi"?