
- 8 - 15 歳
- 45分~2時間45分
- 初心者
説明
-
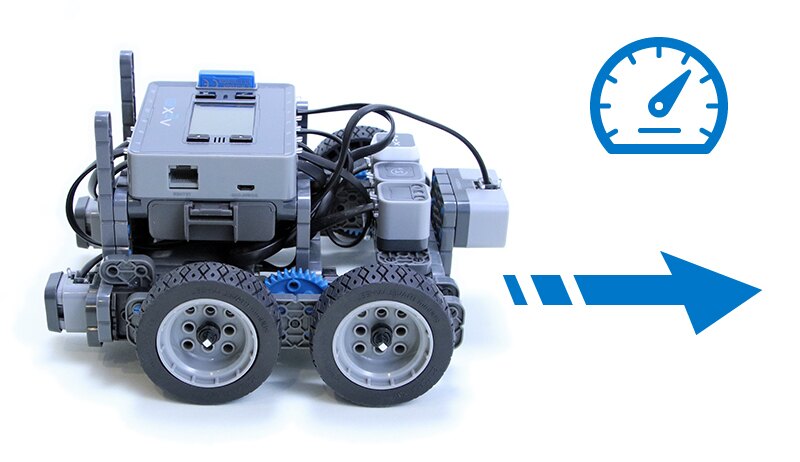
学生は、ロボットを前進、後進、回転させるプロジェクトを作成しながら、自動操縦ロボットの速度の変更を検討します。
主要な概念
-
速度の変化
-
ロボットの行動
-
プロジェクトを作成、ダウンロード、実行する方法
-
前進および後進の速度をプログラムする
-
回転速度をプログラムする
-
プロジェクトを保存する方法
-
抽象的、定量的に推論し、正確さを保つ方法
目的
-
自動操縦ロボットを構築し、バンパー スイッチとスマート センサーを取り付けます。
-
前進、後進、旋回中に速度を変更するようにオートパイロットをプログラムします。
-
学生のプロジェクトを評価して改善し、強化します。
必要な材料
-
VEX IQ スーパーキット
-
VEXコードIQ
-
エンジニアリングノート
ファシリテーションノート
-
教師のサポート、ディスカッションの質問、ヒント、生徒の評価はすべて STEM ラボで組織され、教師の取り組みを成功に導きます。
-
VEXcode IQ と VEXos ユーティリティは、オートパイロットのプログラミングに使用される各生徒のデバイスにダウンロードする必要があります。
-
学生はオートパイロットの構築を開始する前に、各要素に慣れておく必要があります。 各スーパーキットには、キットに含まれるすべての部品を実際のサイズで表現したポスターが含まれています。
-
STEM ラボを開始する前にバッテリーを充電する必要があります。
-
エンジニアリング ノートは、フォルダーまたはバインダーの中に罫線が入った紙と同じくらい単純なものにすることができます。 示されているノートブックは、VEX を通じて入手できる、より洗練された例です。
教育基準
技術リテラシー基準 (STL)
-
9.G
-
9時間
-
11.K
-
11.L
コンピュータサイエンス教師協会 (CSTA)
-
1B-AP-12
-
1B-AP-13
-
1B-AP-16
次世代科学標準 (NGSS)
-
4-PS3-1
共通コア州基準 (CCSS)
-
CCSS.ELA-リテラシー.WHST.6-8.4
-
CCSS.ELA-リテラシー.RST.6-8.3
-
CCSS.MATH.CONTENT.3.NF.A.3
-
CCSS.MATH.CONTENT.4.NF.C.6
-
CCSS.MATH.CONTENT.4.NF.C.7
-
CCSS.MATH.PRACTICE.MP6
テキサス州必須知識およびスキル (TEKS)
-
111.26.b.1.A
-
126.16.c.4.B
-
126.16.c.6.AF
フロリダ州基準 (CPALMS)
-
SC.68.CS-CS.2.13
-
SC.68.CS-CS.2.11
インディアナ州学術基準 (IAS)
-
3-5.PA.3