
Exploration of Velocity - Part 1
Autopilot is ready to drive at different velocities!
This exploration will give you the tools to be able to start creating projects that can move the Autopilot’s motors at velocities that fit the robot's purpose.
VEXcode IQ will be used in the first part of this exploration:
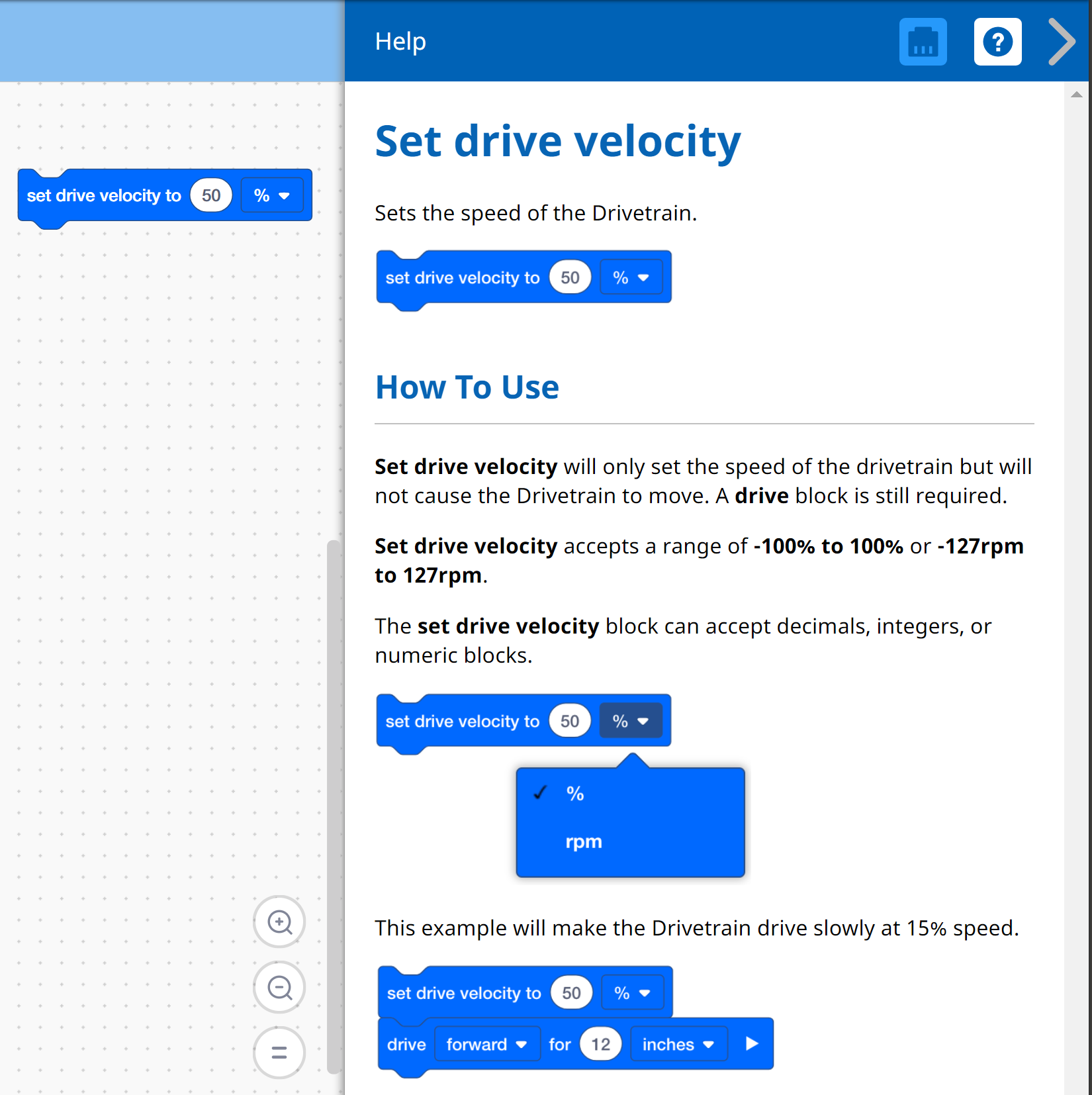
To find out more information about the block, open the Help and then select the block you want to read about.
The Builder in each group should get the hardware required. The Recorder should get the group’s engineering notebook. The Programmer should open VEXcode IQ.
| Quantity | Materials Needed |
|---|---|
| 1 |
Autopilot Robot |
| 1 |
1x1 Connector Pin |
| 1 |
Charged Robot Battery |
| 1 |
VEXcode IQ |
| 1 |
USB Cable (if using a computer) |
| 1 |
Engineering Notebook |
Step 1: Preparing for the Exploration
Before you begin the activity, do you have each of these items ready? The Builder should check each of the following:
- Are all the motors and sensors plugged into the correct port?
- Are the smart cables fully inserted into all of the motors and sensors?
- Is the Brain turned on?
- Is the battery charged?
Step 2: Start a New Project
Before you begin your project, the Programmer needs to select the correct template project. The Autopilot template contains the Autopilot motors and sensors configuration. If the template is not used, your robot will not run the project correctly.
The Programmer should complete the following steps:
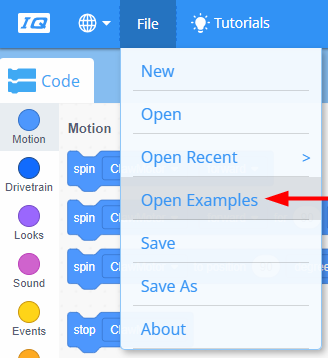
- Open the File menu.
- Select Open Examples.
-
Use the filter bar at the top of the application and select "Templates."
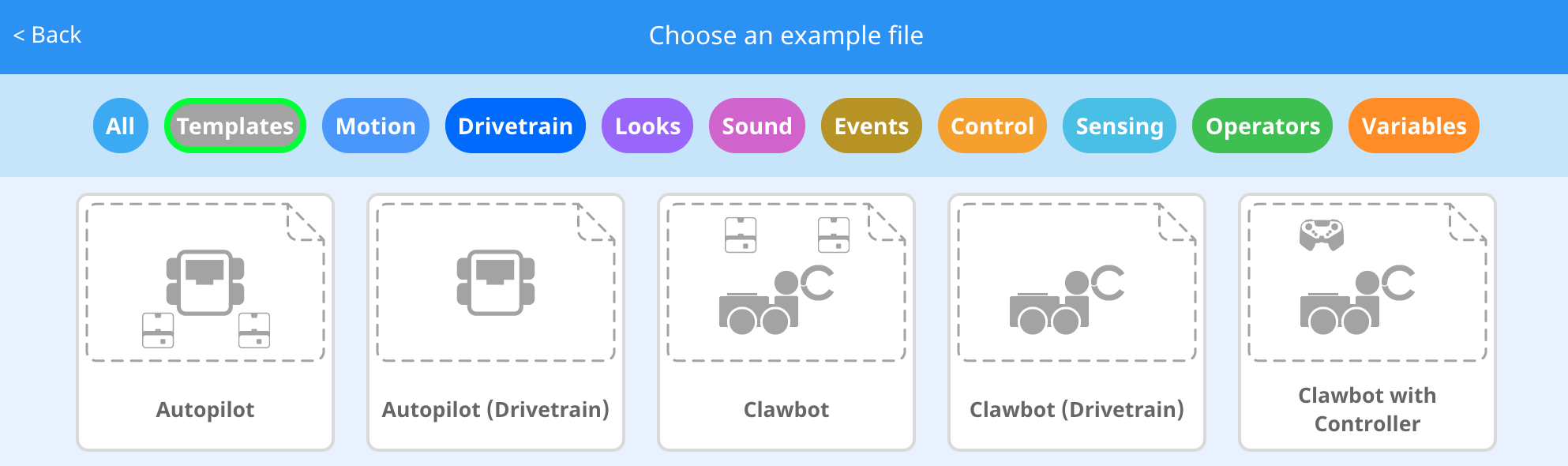
-
Select and open the Autopilot (Drivetrain) Template.
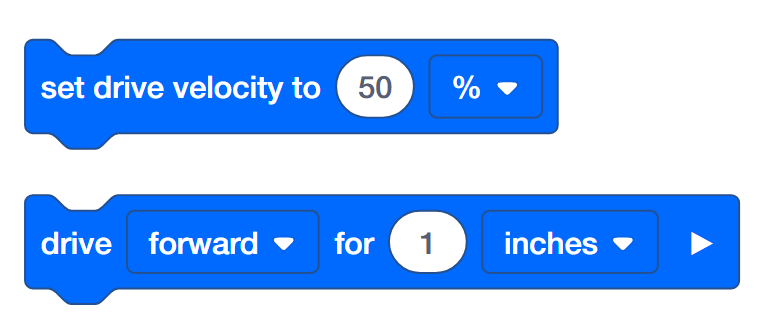
- Rename your project Drive Velocity because we will be using the [set drive velocity] block.
- Save your project. Click on one of the following links for more information on saving: macOS, Windows, Chromebook, iPad.

- Check to make sure the project name Drive Velocity is now in the window in the center of the toolbar.