
참여
Engage 섹션을 시작합니다.
행위는 교사가 할 일이며 질문은 교사가 어떻게 촉진할 것인가 하는 것입니다.
| 사도행전 | 물어보기 |
|---|---|
|
|
참여
-
학생들에게 교사가 VEXcode 123 프로젝트를 구축하고 테스트하여 123 로봇의 눈 센서가 화성 착륙 영역에서 장애물을 감지하도록 돕도록 지시하십시오 . 이를 위해 [Drive until] 블록을 사용합니다.
[까지 운행] 차단 -
시연을 위해
하나의 123 로봇, VEXcode 123에 액세스하는 컴퓨터 또는 태블릿, 시작 위치와 장애물이 표시된 123 필드를 배포합니다. "장애물" 에 밝은 색 또는 흰색 종이 또는 물체를 사용하십시오. 눈 감지 센서는 적외선을 사용하여 물체를 감지하며 어두운 색 물체는 적외선을 흡수하기 때문에 눈 감지 센서가 물체를 감지하기가 어렵습니다. 학생들은 시연이 끝난 후 123대의 로봇과 장치를 수집합니다.
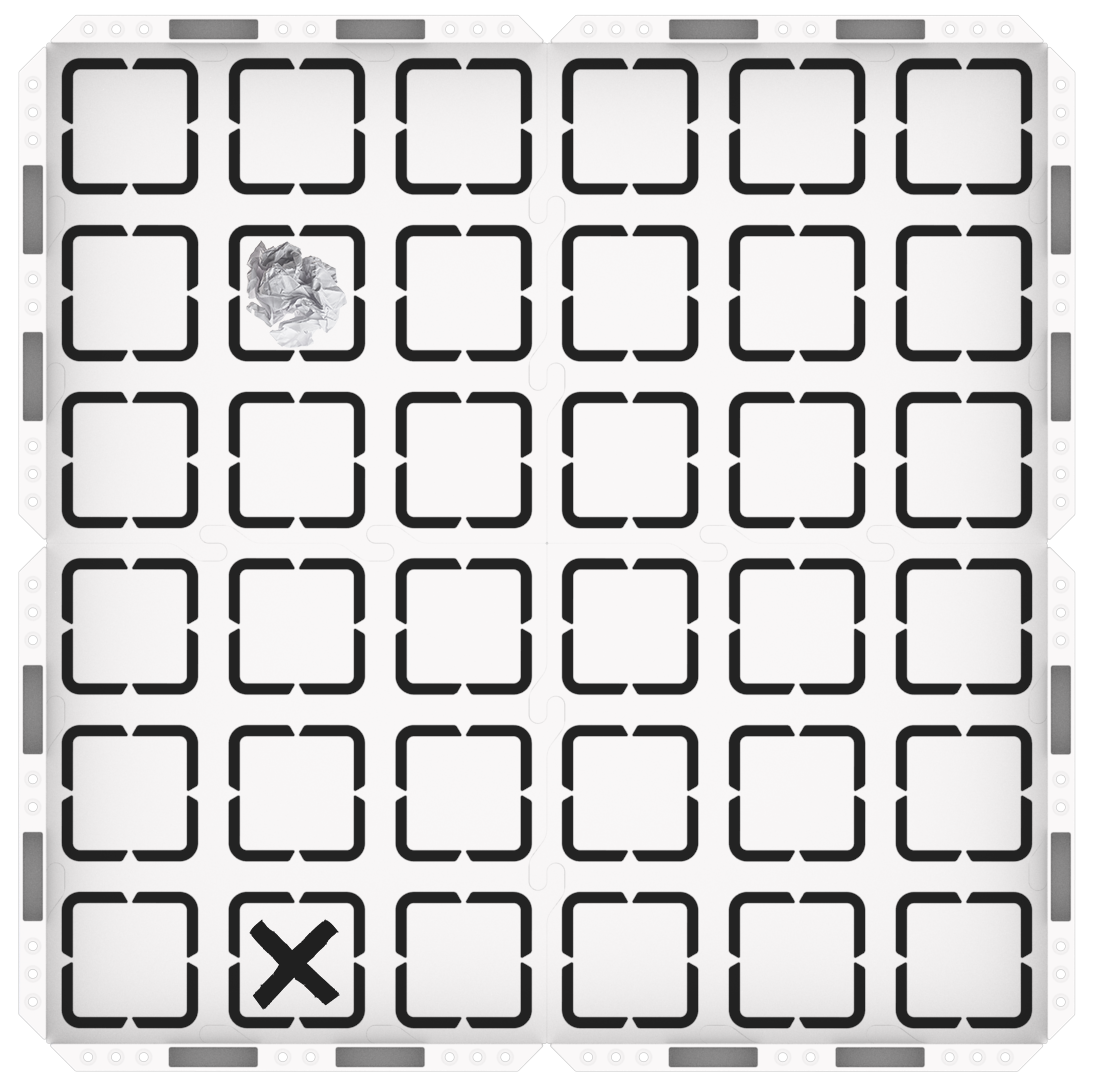
123 필드 설정 -
아래 애니메이션과 같이 123 로봇을 깨우고 123 필드의 장애물을 마주하는 시작 위치에 놓습니다. 이 애니메이션에는 사운드가 포함되어 있습니다.
동영상 파일 - 123 로봇을 컴퓨터나 태블릿에 연결합니다. 123 로봇을 컴퓨터 또는 태블릿에 연결하는 데 대한 지원은 VEX 라이브러리의 이 섹션에 있는 장치별 문서를 참조하십시오.
-
-
촉진
VEXcode 123을 사용하여 학생들과 함께 프로젝트를 구축하고 테스트합니다. [Drive until] 블록을 작업 공간으로
드래그하여 {When started} 블록에 연결합니다. [까지 운행] 차단
[까지 운행] 차단 추가 -
프로젝트를 시작하고 학생들에게 123 로봇의 동작을 관찰하게 합니다. 프로젝트가 시작되면 장애물에 도달할 때까지 로봇 드라이브를 보려면 아래 애니메이션을 확인하십시오.
동영상 파일 - 프로젝트를 테스트하면서 이 상황에서 눈 센서가 어떻게 작동하는지 질문하십시오. 눈 센서가 장애물을 어떻게 감지할 수 있다고 생각하십니까? 123 로봇을 옮기면 어떻게 될까요?
- 프로젝트를 여러 번 다시 시작하고 123 로봇을 장애물에서 가깝거나 멀리 떨어진 다른 위치로 이동하거나 장애물 경로에서 이동하지 마십시오. 눈 센서가 장애물을 성공적으로 감지하려면 장애물에 직면해야 함을 지적하십시오.
-
- 시연 내내 학생들의 관찰, 경청 및 자기 조절에 대한 긍정적 인 보강을 제공합니다.

교사 문제 해결
- 장애물을 감지하는 데 문제가 있는 경우 - 밝은 색의 종이나 물체를 장애물로 사용해보십시오. Eye Sensor는 적외선을 사용하여 물체를 감지하며, 어두운 색상의 물체는 적외선을 흡수하기 때문에 Eye Sensor가 물체를 감지하기가 매우 어렵습니다.
- 학생들이 장애물을 재설정하는지 확인 - 각 그룹이 123 필드에서 프로젝트를 테스트한 후 다음 그룹을 위해 장애물을 제자리에 다시 놓아야 합니다. 필드에 건조 지우기 마커로 장애물의 위치를 표시하여 이 프로세스를 더 쉽게 만들 수 있습니다.
퍼실리테이션 전략
- 차례를 지내십시오 - 실험실 전체에서 학생들은 그룹에서 차례를 지내야합니다. 이를 위한 제안은 다음과 같습니다.
- VEXcode 123에서 코드를 빌드하는 것과 123 로봇을 현장에 배치하고 프로젝트를 시작하는 것을 번갈아 가며 수행합니다. 학생들은 플레이 파트 1과 플레이 파트 2 사이에서 파트너와 역할을 교환하여 그룹 구성원 모두가 컴퓨터나 태블릿을 사용할 수 있도록 할 수 있습니다.
- 플레이를 시작할 때 턴 테이킹이 어떻게 작동하는지 파악하여 학생들이 컴퓨터나 태블릿으로 턴을 할 때와 턴이 끝날 때를 대비할 수 있도록 한다.
- 새로운 시작 위치 시도 - 학생들이 플레이 파트 1에서 장애물을 즉시 감지한 경우, 123 로봇을 새로운 시작 위치로 이동시킨 후 다시 시도하여 물체 감지 실험을 더 해보도록 합니다. 눈 센서가 여전히 동일한 장애물을 감지합니까? 뭔가 다른 것을 감지합니까? 왜 그렇다고 생각하는 걸까요?