
Betrekken
Start de sectie Betrekken
ACTS is wat de docent gaat doen en VRAAGT hoe de docent gaat faciliteren.
| HANDELINGEN | VRAAGT |
|---|---|
|
|
Betrekken
-
InstrueerInstrueer
studenten dat ze de leraar gaan helpen bij het bouwen en testen van een VEXcode 123-project, om de oogsensor op de 123 Robot een obstakel in het landingsterrein van Mars te laten detecteren. Hiervoor gebruiken ze het blok [Drive until].
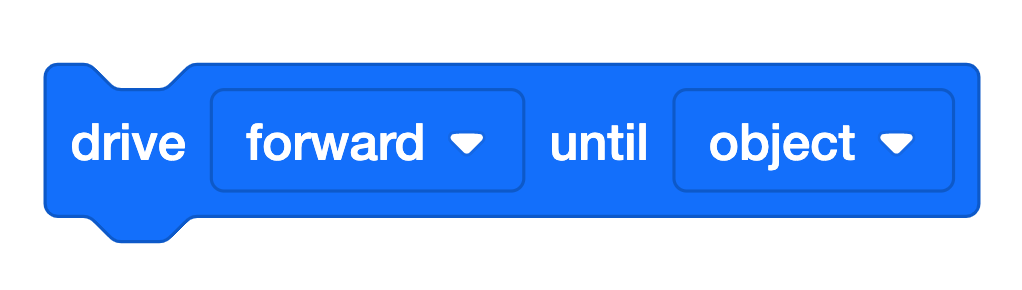
[Rijden tot] blok -
Distribueer
één 123 Robot, een computer of tablet om toegang te krijgen tot VEXcode 123, en een 123 Veld met de startlocatie gemarkeerd, en het obstakel op zijn plaats, voor de demonstratie. Gebruik een licht of wit gekleurd papier of object voor het "obstakel". De oogsensor gebruikt infraroodlicht om objecten te detecteren en aangezien donkergekleurde objecten infraroodlicht absorberen, is het moeilijk voor de oogsensor om ze te detecteren. Studenten verzamelen hun 123 robots en apparaten nadat de demonstratie is voltooid.
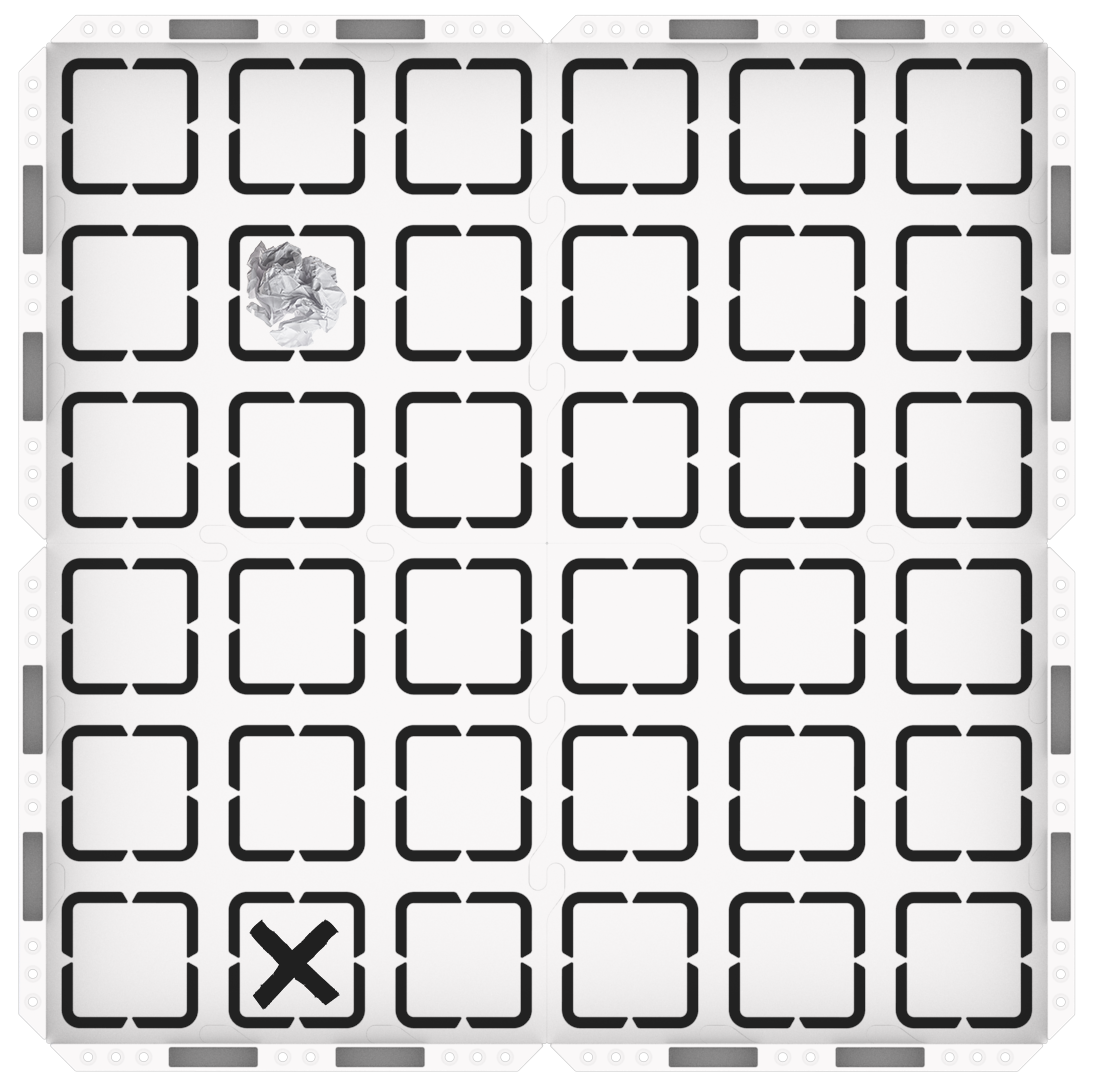
123 Veldinstelling -
Maak de 123 Robot wakker, zoals weergegeven in de onderstaande animatie, en plaats deze op de startlocatie, tegenover het obstakel, op het 123 Veld. Merk op dat deze animatie geluid bevat.
Videobestand - Sluit de 123 Robot aan op de computer of tablet. Voor ondersteuning bij het aansluiten van uw 123 Robot op uw computer of tablet, zie de apparaatspecifieke artikelen in dit gedeelte van de VEX-bibliotheek.
-
-
FaciliterenFaciliteren van
het bouwen en testen van het project met studenten, met behulp van VEXcode 123.
Sleep het [Drive until] -blok naar de werkruimte en bevestig het aan het {When started} blok.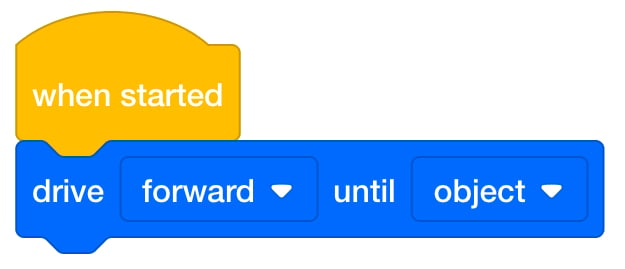 [Rijden tot] blokkeren
[Rijden tot] blokkeren toevoegen -
Start het project en laat leerlingen het gedrag van de 123 Robot observeren. Bekijk de onderstaande animatie om de robotaandrijving te zien totdat deze het obstakel bereikt zodra het project is gestart.
Videobestand - Stel tijdens het testen van het project vragen over hoe de oogsensor in deze situatie werkt. Hoe denkt u dat de oogsensor het obstakel kan detecteren? Wat denk je dat er zou gebeuren als we de 123 Robot zouden verplaatsen?
- Herstart het project meerdere keren en verplaats de 123 Robot naar verschillende locaties, dichter of verder van het obstakel, of niet in het pad van het obstakel. Zorg ervoor dat u erop wijst dat de oogsensor de obstakels onder ogen moet zien om ze met succes te detecteren.
-
- AanbodBied positieve versterking voor de observatie, het luisteren en de zelfregulering van studenten tijdens de demonstratie.

Problemen van docenten oplossen
- Als je problemen hebt met het detecteren van een obstakel, probeer dan lichtgekleurd papier of voorwerpen als obstakels te gebruiken. De Oogsensor gebruikt infrarood licht om objecten te detecteren, en aangezien donkergekleurde objecten infrarood licht absorberen, maakt het het erg moeilijk voor de Oogsensor om ze te detecteren.
- Zorg ervoor dat studenten de obstakels resetten - Nadat elke groep hun project op het 123-veld heeft getest, zorg er dan voor dat ze de obstakels weer op hun plaats zetten voor de volgende groep. U kunt de locaties van de obstakels markeren met een droog uitwisbare marker op het veld, om dit proces gemakkelijker te maken.
Faciliterende strategieën
- Om de beurt - In het hele lab moeten studenten om de beurt in hun groep deelnemen. Suggesties om dit te faciliteren zijn:
- Wissel af tussen het bouwen van de code in VEXcode 123 en het plaatsen van de 123 Robot op het Veld en het starten van het project. Studenten kunnen met hun partner rollen wisselen tussen Play Part 1 en Play Part 2, zodat beide leden van de groep de kans krijgen om de computer of tablet te gebruiken.
- Identificeer aan het begin van Play hoe de turn-taking zal werken, zodat studenten voorbereid kunnen zijn op wanneer ze aan de beurt zullen zijn met de computer of tablet en wanneer hun beurt voorbij zal zijn.
- Probeer een nieuwe startpositie - Als leerlingen het obstakel meteen detecteren in Play Part 1, laat ze de 123 Robot naar een nieuwe startlocatie verplaatsen en probeer het opnieuw, om meer te experimenteren met objectdetectie. Detecteert de oogsensor nog steeds hetzelfde obstakel? Detecteert het iets anders? Waarom denken ze dat dat zo is?