
Tương tác
Khởi chạy Phần Giao kết
HÀNH VI là những gì giáo viên sẽ làm và HỎI là giáo viên sẽ tạo điều kiện như thế nào.
| HÀNH VI | YÊU CẦU |
|---|---|
|
|
Tương tác
-
Hướng dẫn
học sinh rằng họ sẽ giúp giáo viên xây dựng và thử nghiệm một dự án VEXcode 123, để làm cho Cảm biến mắt trên Robot 123 phát hiện ra một chướng ngại vật trong khu vực hạ cánh trên sao Hỏa. Để thực hiện việc này, họ sẽ sử dụng khối [Drive until].
[Lái xe cho đến khi] bị chặn -
Phân phối
một Robot 123, máy tính hoặc máy tính bảng để truy cập VEXcode 123 và Trường 123 với vị trí bắt đầu được đánh dấu và chướng ngại vật tại chỗ để trình diễn. Sử dụng một tờ giấy hoặc đồ vật màu sáng hoặc màu trắng cho "chướng ngại vật". Cảm biến mắt sử dụng ánh sáng hồng ngoại để phát hiện các vật thể và vì các vật thể có màu tối hấp thụ ánh sáng hồng ngoại nên Cảm biến mắt rất khó phát hiện chúng. Học sinh sẽ thu thập 123 Robot và thiết bị của mình sau khi cuộc biểu tình hoàn tất.
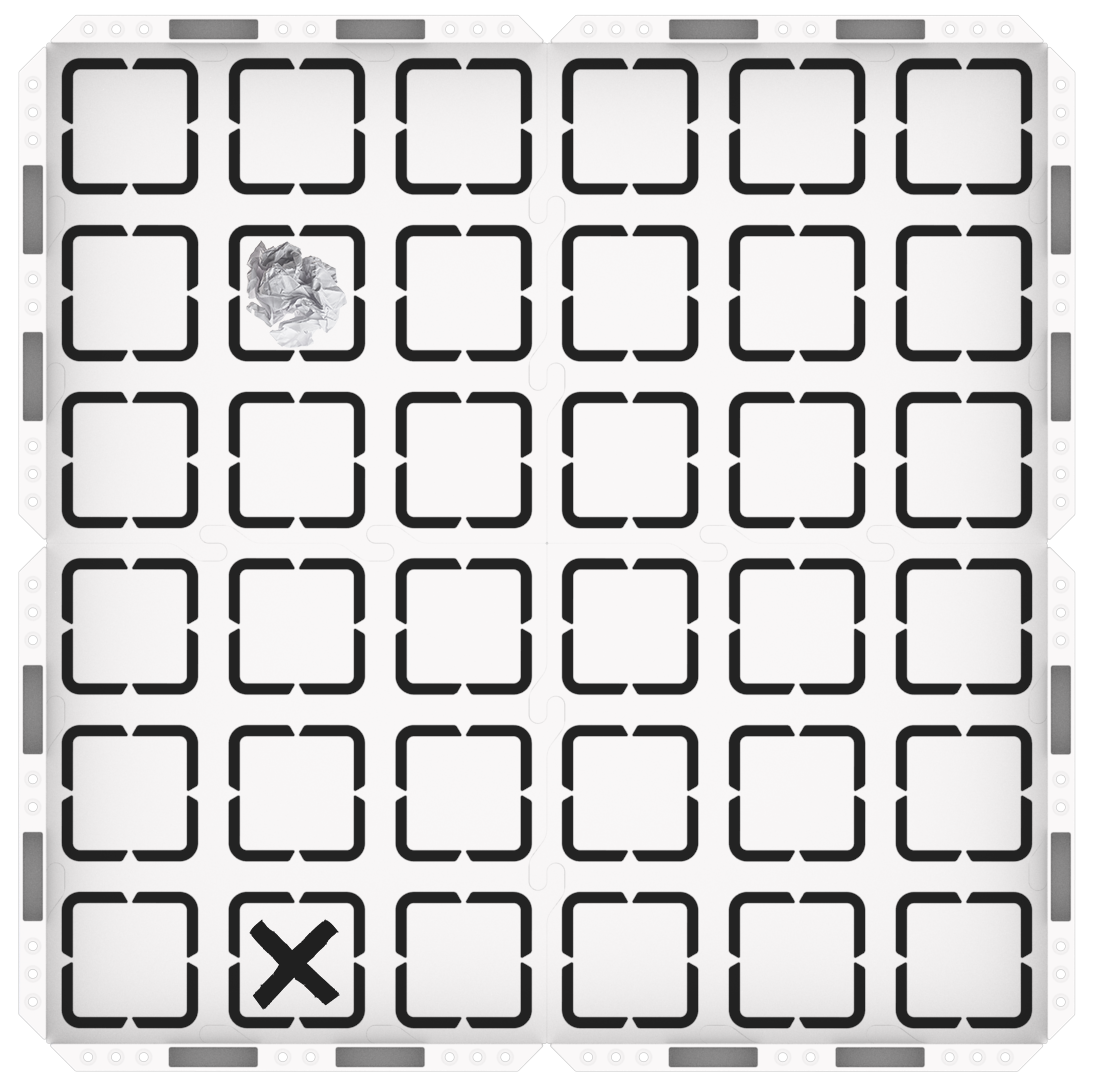
123 Thiết lập trường -
Đánh thức Robot 123, như thể hiện trong hình ảnh động bên dưới, và đặt nó vào vị trí bắt đầu, đối mặt với chướng ngại vật, trên Trường 123. Lưu ý rằng hình động này bao gồm âm thanh.
Tệp video - Kết nối 123 Robot với máy tính hoặc máy tính bảng. Để được hỗ trợ trong việc kết nối 123 Robot với máy tính hoặc máy tính bảng của bạn, hãy xem các bài viết dành riêng cho thiết bị trong phần này của Thư viện VEX.
-
-
Tạo điều kiện thuận lợi cho việc
xây dựng và thử nghiệm dự án với sinh viên, sử dụng VEXcode 123.
Kéo khối [Drive until] vào Không gian làm việc và gắn nó vào {When started} khối.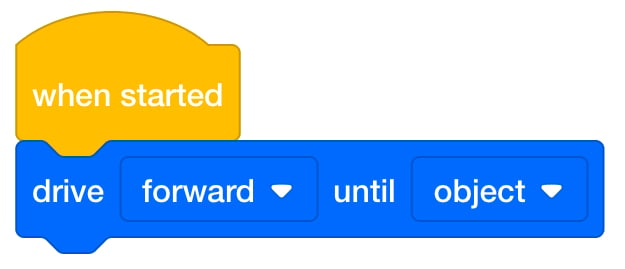
Thêm [Lái xe đến] Chặn -
Bắt đầu dự án và yêu cầu học sinh quan sát hành vi của Robot 123. Xem hình ảnh động bên dưới để xem quá trình lái robot cho đến khi nó đạt đến chướng ngại vật sau khi dự án được bắt đầu.
Tệp video - Khi bạn kiểm tra dự án, hãy đặt câu hỏi về cách cảm biến mắt hoạt động trong tình huống này. Bạn nghĩ cảm biến mắt có thể phát hiện chướng ngại vật như thế nào? Nếu chúng ta di chuyển 123 Robot, bạn nghĩ điều gì sẽ xảy ra?
- Khởi động lại dự án nhiều lần và di chuyển 123 Robot đến các vị trí khác nhau, gần hoặc xa chướng ngại vật, hoặc không nằm trong đường đi của chướng ngại vật. Hãy chắc chắn chỉ ra rằng Cảm biến Mắt cần phải đối mặt với các chướng ngại vật để phát hiện thành công chúng.
-
- Cung cấp sự củng cố tích cực cho việc quan sát, lắng nghe và tự điều chỉnh của học sinh trong suốt quá trình minh họa.

Xử lý sự cố cho giáo viên
- Nếu bạn gặp khó khăn trong việc phát hiện chướng ngại vật - Hãy thử sử dụng giấy màu sáng hoặc các vật thể làm chướng ngại vật. Cảm biến mắt sử dụng ánh sáng hồng ngoại để phát hiện các vật thể và vì các vật thể tối màu hấp thụ ánh sáng hồng ngoại, nên cảm biến mắt rất khó phát hiện chúng.
- Đảm bảo rằng học sinh thiết lập lại các chướng ngại vật - Sau khi mỗi nhóm kiểm tra dự án của họ trên Trường 123, hãy đảm bảo rằng họ đặt lại các chướng ngại vật cho nhóm tiếp theo. Bạn có thể đánh dấu vị trí của các chướng ngại vật bằng điểm đánh dấu xóa khô trên Cánh đồng, để làm cho quá trình này dễ dàng hơn.
Chiến lược tạo thuận lợi
- Thay phiên nhau - Trong phòng thí nghiệm, học sinh nên thay phiên nhau trong nhóm của mình. Các đề xuất để tạo điều kiện thuận lợi cho việc này bao gồm:
- Thay thế giữa việc xây dựng mã trong VEXcode 123 và đặt Robot 123 trên hiện trường và bắt đầu dự án. Học sinh có thể hoán đổi vai trò với đối tác của mình giữa Chơi Phần 1 và Chơi Phần 2, để cả hai thành viên trong nhóm có cơ hội sử dụng máy tính hoặc máy tính bảng.
- Khi bắt đầu Chơi, hãy xác định cách thức hoạt động của lượt chơi, để học sinh có thể chuẩn bị khi nào các em sẽ có lượt chơi với máy tính hoặc máy tính bảng và khi nào lượt chơi của các em sẽ kết thúc.
- Hãy thử một vị trí bắt đầu mới - Nếu học sinh phát hiện chướng ngại vật ngay trong Chơi Phần 1, hãy yêu cầu các em di chuyển Robot 123 đến một vị trí bắt đầu mới và thử lại, để thử nghiệm phát hiện đối tượng nhiều hơn. Cảm biến mắt có còn phát hiện trở ngại tương tự không? Nó có phát hiện ra điều gì khác không? Tại sao họ nghĩ như vậy?