
Zapojit
Spusťte sekci Zapojit
ČINY je to, co učitel udělá a PTÁ SE, jak mu to učitel usnadní.
| ZÁKONY | PTÁ SE |
|---|---|
|
|
Zapojit
-
Poučte
studenty, že pomohou učiteli sestavit a otestovat projekt VEXcode 123, aby senzor očí na robotu 123 detekoval překážku v oblasti přistání na Marsu. K tomu použije blok [Drive until].
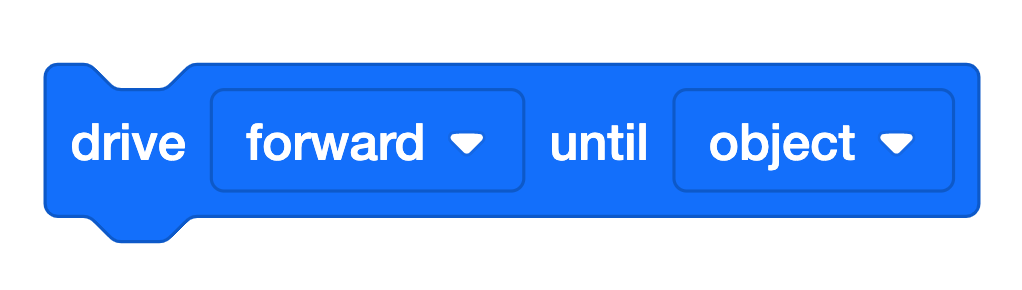 Blok
Blok [Drive until] -
Distribuujte distribuci
jednoho robota 123, počítače nebo tabletu pro přístup k VEXcode 123 a pole 123 s označeným počátečním místem a překážkou na místě pro demonstraci. Pro „překážku“ použijte světlý nebo bíle zbarvený papír nebo předmět. Oční senzor používá k detekci objektů infračervené světlo, a protože tmavě zbarvené objekty absorbují infračervené světlo, je pro oční senzor obtížné je detekovat. Studenti si po dokončení demonstrace vyzvednou svých 123 robotů a zařízení.
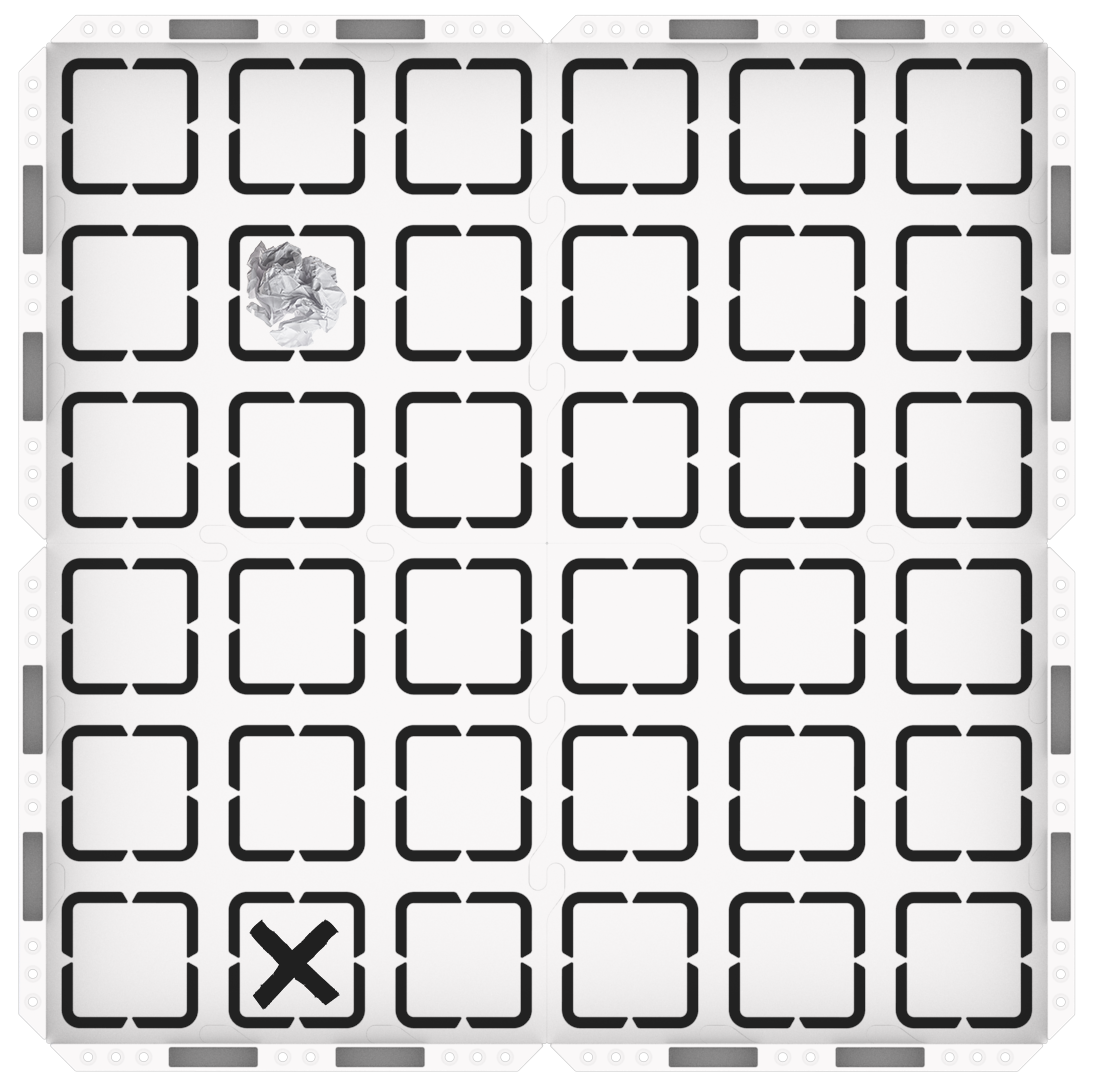
123 Nastavení pole -
Probuďte robota 123, jak je znázorněno v animaci níže, a umístěte jej na výchozí místo, čelem k překážce, na pole 123. Upozorňujeme, že tato animace obsahuje zvuk.
Video soubor - Připojte 123 Robot k počítači nebo tabletu. Podporu při připojování robota 123 k počítači nebo tabletu naleznete v článcích o konkrétním zařízení v této části knihovny VEX.
-
-
Usnadnit
budování a testování projektu se studenty pomocí VEXcode 123.
Přetáhněte blok [Drive until] do pracovního prostoru a připojte jej k {When started} bloku.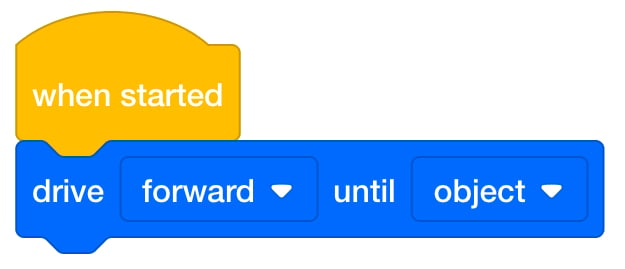
Přidej blok [Drive until] -
Spusťte projekt a nechte studenty pozorovat chování robota 123. Podívejte se na animaci níže, abyste viděli pohon robota, dokud nedosáhne překážky, jakmile je projekt spuštěn.
Video soubor - Při testování projektu se ptejte na to, jak v této situaci funguje oční senzor. Jak si myslíte, že oční senzor dokáže detekovat překážku? Co kdybychom přemístili robota 123, co si myslíte, že by se stalo?
- Projekt několikrát restartujte a přemístěte robota 123 na různá místa, blíže nebo dále od překážky, nebo ne v cestě překážky. Nezapomeňte upozornit, že snímač očí musí čelit překážkám, aby je úspěšně detekoval.
-
- NabídkaNabídněte pozitivní posílení pro pozorování, poslech a samoregulaci studentů během celé demonstrace.

Odstraňování problémů učitele
- Pokud máte potíže s detekcí překážky - zkuste jako překážky použít světlý papír nebo předměty. Oční senzor používá k detekci objektů infračervené světlo, a protože tmavě zbarvené objekty absorbují infračervené světlo, je pro oční senzor velmi obtížné je detekovat.
- Ujistěte se, že studenti resetují překážky - Po každé skupině otestujte svůj projekt na 123 Field, ujistěte se, že kladou překážky zpět na místo pro další skupinu. Umístění překážek můžete označit značkou suchého vymazání na poli, abyste tento proces usnadnili.
Strategie usnadnění
- Take Turns - V celé laboratoři by se studenti měli střídat ve svých skupinách. Návrhy, jak to usnadnit, zahrnují:
- Střídejte sestavení kódu v kódu VEXcode 123 a umístění robota 123 na pole a zahájení projektu. Studenti si mohou se svým partnerem vyměnit role mezi částí hry 1 a částí hry 2, takže oba členové skupiny mají možnost používat počítač nebo tablet.
- Na začátku hry určete, jak bude střídání fungovat, aby se studenti mohli připravit na to, kdy budou mít střídání s počítačem nebo tabletem a kdy bude jejich střídání u konce.
- Vyzkoušejte novou výchozí pozici - Pokud studenti detekují překážku okamžitě v části hry 1, nechte je přesunout robota 123 na nové výchozí místo a zkuste to znovu, abyste mohli experimentovat s detekcí objektů více. Detekuje oční senzor stále stejnou překážku? Detekuje něco jiného? Proč si myslí, že tomu tak je?