
Engager
Lancer la section Engager
ACTES est ce que l'enseignant fera et DEMANDE comment l'enseignant facilitera.
| ACTES | DEMANDE |
|---|---|
|
|
Engager
-
InstruireInstruire
les élèves qu'ils vont aider l'enseignant à construire et à tester un projet VEXcode 123, pour que le capteur oculaire du robot 123 détecte un obstacle dans la zone d'atterrissage sur Mars. Pour ce faire, ils utiliseront le bloc [Drive until].
[Conduire jusqu'au] bloc -
DistribuezDistribuez
un robot 123, un ordinateur ou une tablette pour accéder au VEXcode 123 et un champ 123 avec l'emplacement de départ marqué et l'obstacle en place pour la démonstration. Utilisez un papier ou un objet de couleur claire ou blanche pour l '« obstacle ». Le capteur oculaire utilise la lumière infrarouge pour détecter les objets, et comme les objets de couleur foncée absorbent la lumière infrarouge, il est difficile pour le capteur oculaire de les détecter. Les élèves récupéreront leurs 123 robots et appareils une fois la démonstration terminée.
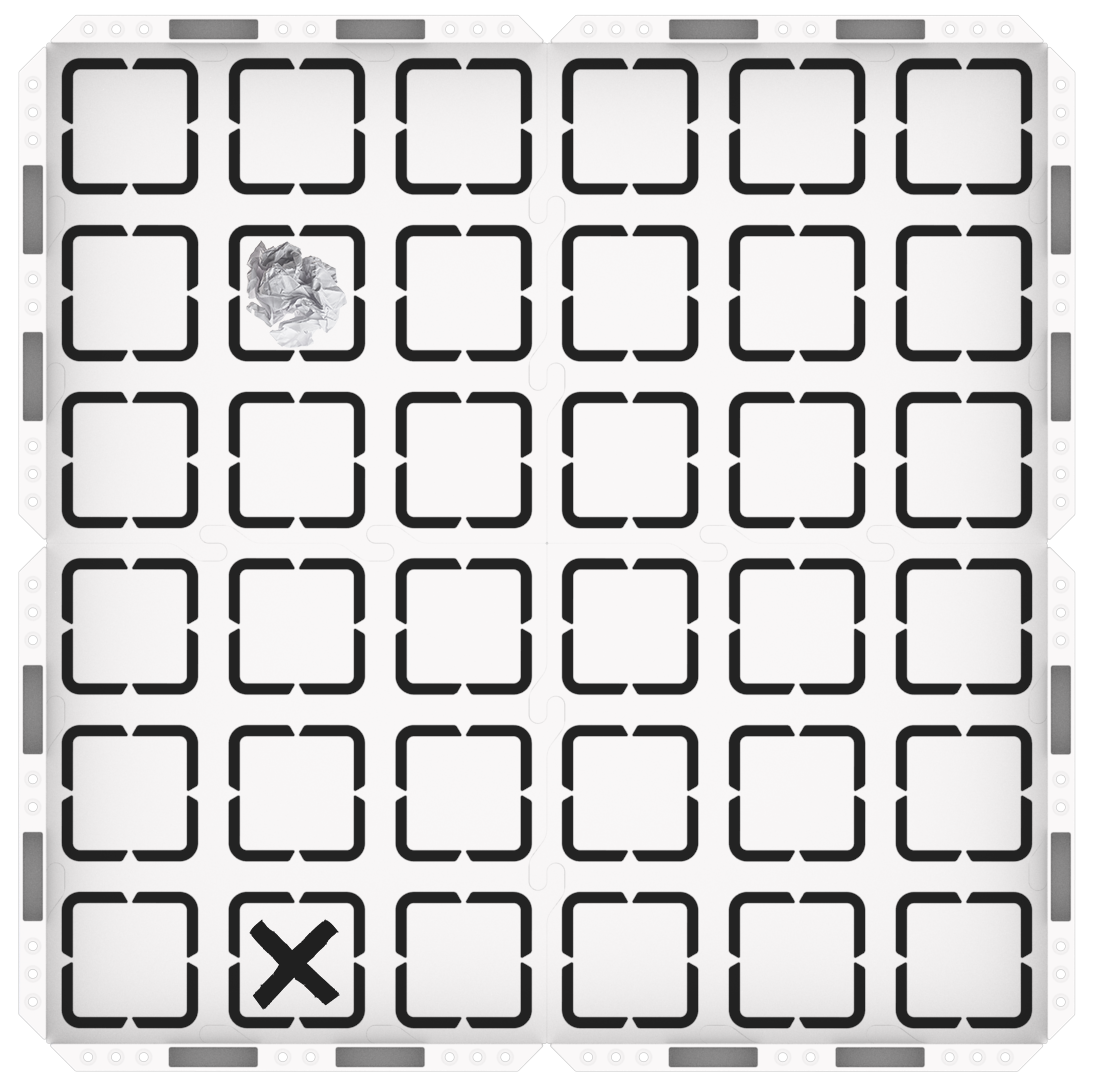
123 Configuration du champ -
Réveillez le robot 123, comme indiqué dans l'animation ci-dessous, et placez-le sur l'emplacement de départ, face à l'obstacle, sur le terrain 123. Notez que cette animation inclut le son.
Fichier vidéo - Connectez le robot 123 à l'ordinateur ou à la tablette. Pour obtenir de l'aide sur la connexion de votre robot 123 à votre ordinateur ou à votre tablette, consultez les articles spécifiques à l'appareil dans cette section de la bibliothèque VEX.
-
-
FaciliterFaciliter la
construction et le test du projet avec les étudiants, en utilisant VEXcode 123.
Faites glisser le bloc [Drive until] dans l'espace de travail et attachez-le au {When started} bloc.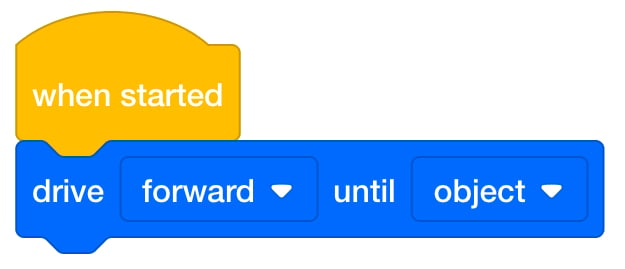
Ajouter le bloc [Drive until] -
Démarrez le projet et demandez aux élèves d'observer le comportement du robot 123. Regardez l'animation ci-dessous pour voir le robot conduire jusqu'à ce qu'il atteigne l'obstacle une fois le projet démarré.
Fichier vidéo - Pendant que vous testez le projet, posez des questions sur le fonctionnement du capteur oculaire dans cette situation. Comment pensez-vous que le capteur oculaire peut détecter l'obstacle ? Et si nous déplacions le robot 123, que pensez-vous qu'il se passerait ?
- Redémarrez le projet plusieurs fois et déplacez le robot 123 à différents endroits, plus près ou plus loin de l'obstacle, ou non sur le chemin de l'obstacle. Assurez-vous de souligner que le capteur oculaire doit faire face aux obstacles afin de les détecter avec succès.
-
- Offre Offrir un renforcement positif pour l'observation, l'écoute et l'autorégulation des élèves tout au long de la démonstration.

Dépannage de l'enseignant
- Si vous avez du mal à détecter un obstacle - Essayez d'utiliser du papier ou des objets de couleur claire comme obstacles. Le capteur oculaire utilise la lumière infrarouge pour détecter les objets, et comme les objets de couleur foncée absorbent la lumière infrarouge, il est très difficile pour le capteur oculaire de les détecter.
- Assurez-vous que les élèves réinitialisent les obstacles - Après que chaque groupe ait testé son projet sur le terrain 123, assurez-vous qu'ils remettent les obstacles en place pour le groupe suivant. Vous pouvez marquer l'emplacement des obstacles avec un marqueur effaçable à sec sur le terrain, pour faciliter ce processus.
Stratégies d'animation
- À tour de rôle - Tout au long du laboratoire, les élèves doivent se relayer dans leurs groupes. Voici quelques suggestions pour faciliter cela :
- Alternez entre la construction du code dans VEXcode 123 et le placement du robot 123 sur le terrain et le démarrage du projet. Les élèves peuvent échanger des rôles avec leur partenaire entre Play Part 1 et Play Part 2, afin que les deux membres du groupe aient une chance d'utiliser l'ordinateur ou la tablette.
- Identifiez au début de Play comment la prise de tour fonctionnera, afin que les élèves puissent être préparés au moment où ils auront un tour avec l'ordinateur ou la tablette, et au moment où leur tour sera terminé.
- Essayez une nouvelle position de départ - Si les élèves détectent l'obstacle tout de suite dans Play Part 1, demandez-leur de déplacer le robot 123 vers un nouvel emplacement de départ et essayez à nouveau, pour expérimenter davantage la détection d'objets. Le capteur oculaire détecte-t-il toujours le même obstacle ? Détecte-t-il quelque chose de différent ? Pourquoi pensent-ils que c'est le cas ?