
수업 2: 동작 반복하기
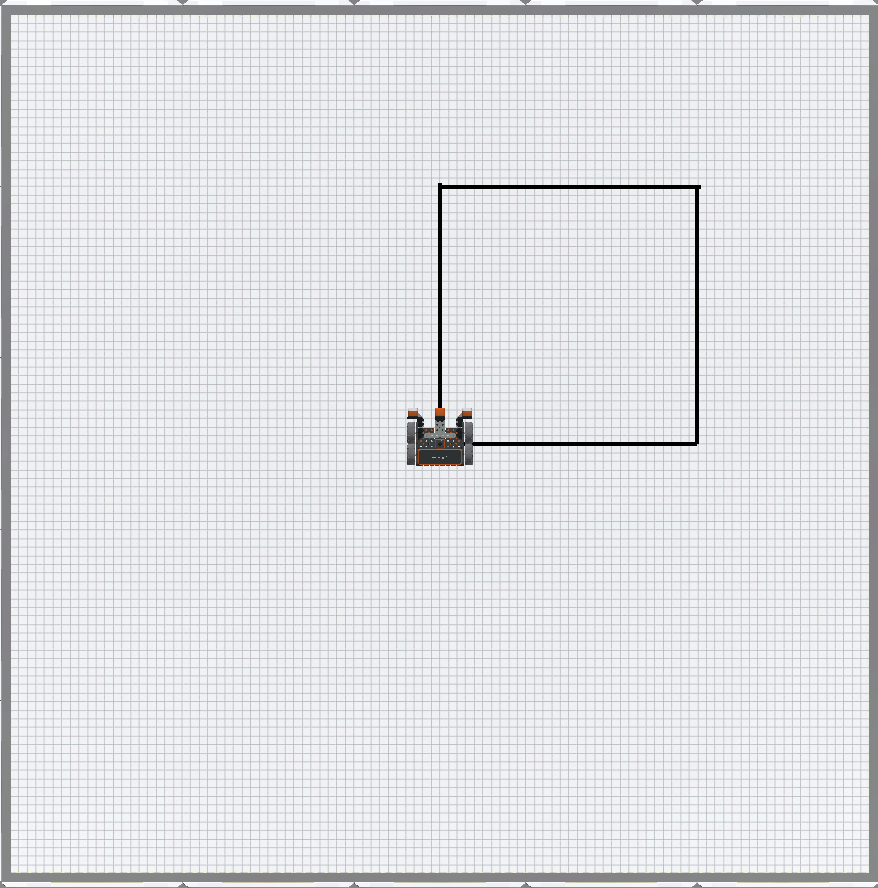
VR 로봇이 펜을 사용하여 아트 캔버스 놀이터 에 사각형을 그렸으므로 이제 블록을 반복하고 프로젝트를 단순화하는 방법을 배우게 됩니다. 이 수업에서는 [반복] 블록을 사용하여 아트 캔버스 놀이터 에 정사각형을 그리는 단계를 안내합니다.
학습 성과
- [반복] 블록을 사용하여 블록 안의 블록을 지정된 횟수만큼 반복하는 방법을 식별합니다.
- [반복] 블록이 정수를 매개변수로 받을 수 있다는 것을 확인하세요.
- [반복] 블록을 종료하는 데 조건이 사용된다는 것을 식별합니다.
- 프로젝트에서 [반복] 블록을 사용하는 이유를 설명하세요.
- [반복] 블록이 포함된 프로젝트의 흐름을 설명하세요.
프로젝트 이름 바꾸기
- 이전 수업의 프로젝트가 아직 로드되지 않았다면 Unit3Lesson1 프로젝트를 로드하세요.
-
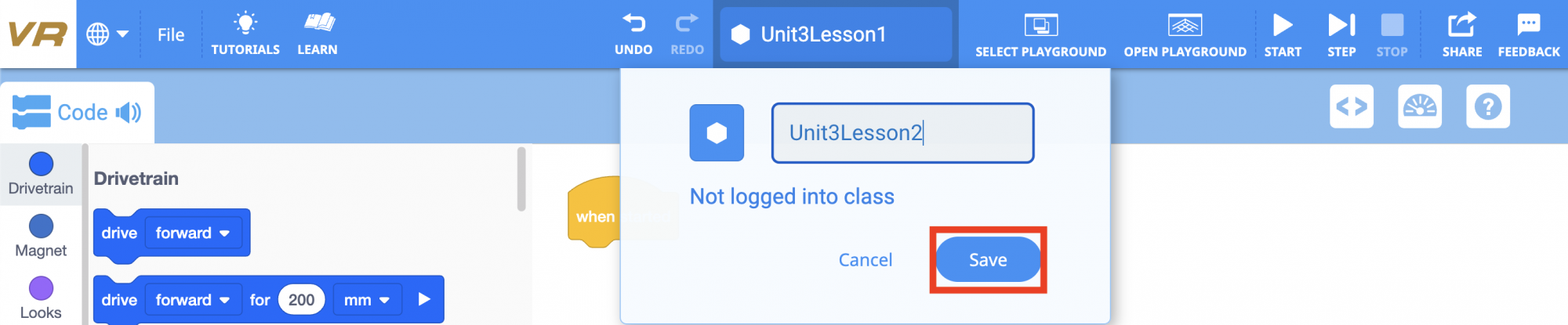
프로젝트 이름 상자를 선택하여 프로젝트 이름을 변경합니다.

-
새 프로젝트 이름 Unit3Lesson2입력하고 "저장"을 선택합니다.
반복되는 동작
[반복] 블록은 블록 내의 블록을 지정된 횟수만큼 반복하는 데 사용됩니다. [반복] 블록은 블록이 반복되는 프로젝트를 만들 때 시간과 노력을 절약해줍니다. 작업 공간에 추가 블록을 끌어다 놓거나 기존 블록을 복제하는 데 시간을 들이는 대신 [반복] 블록을 사용하면 공간과 시간을 절약할 수 있습니다.
-
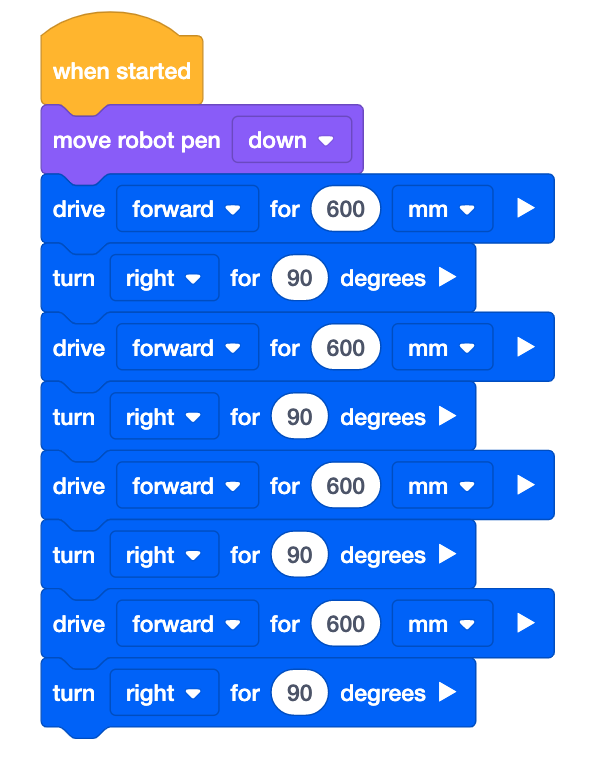
이전 프로젝트를 수정하거나 이 기본 프로젝트와 일치하도록 새 프로젝트를 만듭니다. 기존 블록, 스위치 블록을 사용하거나 두 가지를 조합하여 프로젝트를 만들 수 있습니다.
-
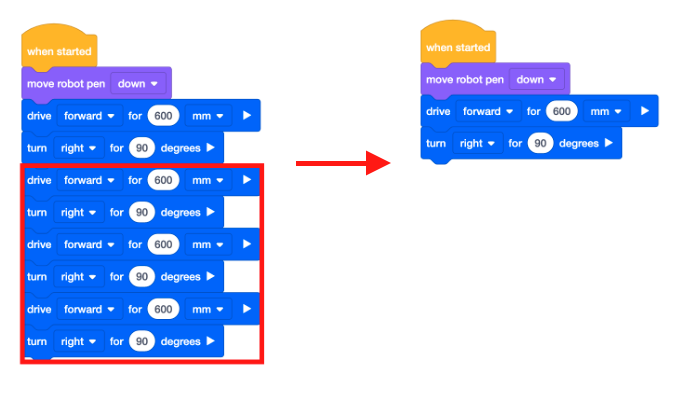
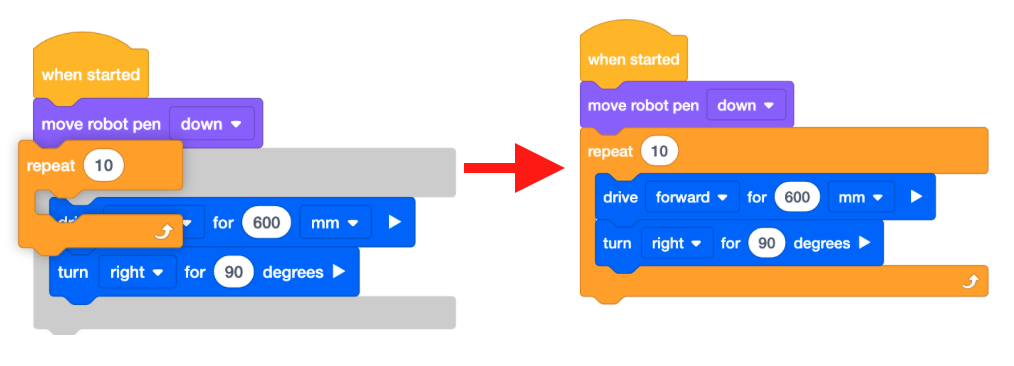
이 프로젝트에서 반복되는 블록은 [Drive for]와 [Turn for] 블록입니다. 프로젝트의 아래쪽 6개 블록을 제거하여 [로봇 펜 이동] 블록 아래에 [운전] 블록 1개와 [회전] 블록 1개만 남도록 합니다.
-
[반복] 블록을 드래그하세요. [반복] 블록은 작업 공간에 블록을 배치할 때 내부에 있을 블록 주위에 회색 그림자를 생성합니다.
-
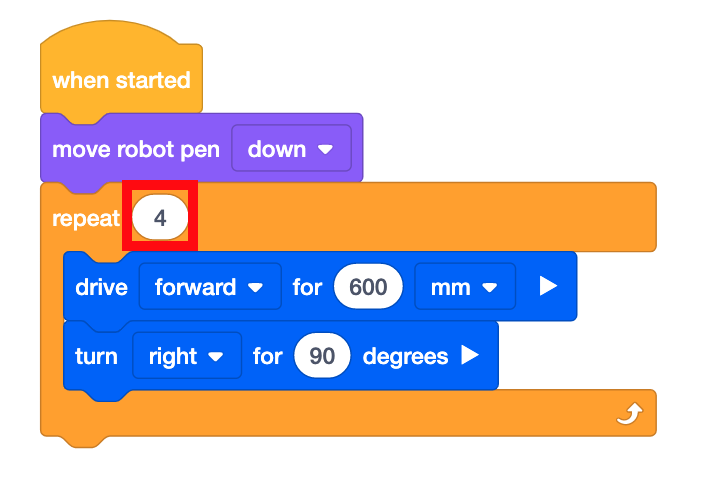
[반복] 블록의 매개변수를 “4”로 설정하면 VR 로봇이 정사각형의 네 변을 모두 그립니다.
스위치 블록 사용
[반복] 블록은 정수를 허용합니다. [반복] 블록의 매개변수로 소수점 이하 자릿수는 작동하지 않습니다.
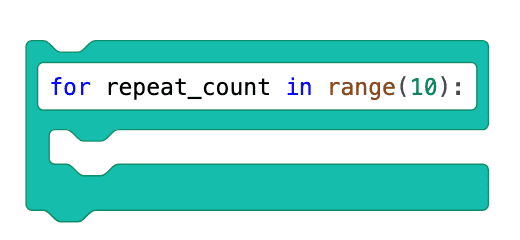
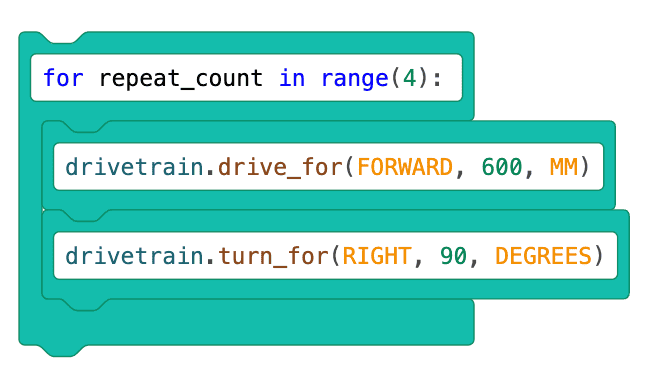
이것은 스위치[반복] 블록입니다. 이 예에서 [반복] 블록은 동작을 10번 반복하도록 설정되었습니다. 명령,for repeat_count in range(10)10번 반복되는 루프를 시작하는 코드입니다.
아래 이미지는 Switch [Repeat] C-블록 내부에 중첩된 Switch [Drive for] 및 [Turn for] 명령을 보여줍니다. Switch [Repeat] 블록의 매개변수는 "4"로 설정되어 C 블록 내에 중첩된 [Drive for] 및 [Turn for] 명령이 4번 반복됩니다.
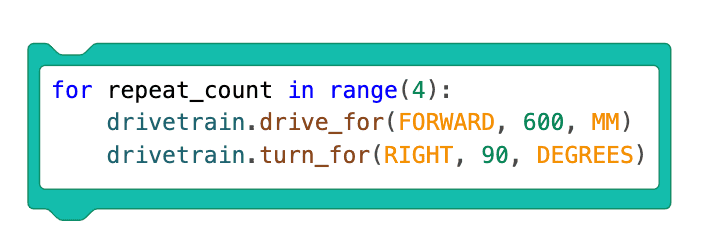
아래 이미지는 동일한 스위치 블록 스택을 하나의 스위치 블록으로 변환한 것을 보여줍니다.
for repeat_count in range(4): 은 이 명령 아래에 들여쓰기된 코드 줄을4 번 반복하도록 로봇에 지시하는 반복 루프를 만드는 Python 명령입니다.
다음 코드 줄은 반복될 동작이기 때문에 반복 명령 아래에 들여쓰기되어 있습니다. 들여쓰기는 기본적으로 4칸으로 설정됩니다. Python 명령어를 입력할 때는 들여쓰기할 때 항상 같은 수의 공백을 사용해야 합니다. 들여쓰기가 일관되지 않으면 프로젝트가 제대로 실행되지 않습니다.
명령 drivetrain.drive_for(FORWARD, 600, MM) 로봇에게 600mm 전진하라고 지시하고, 명령drivetrain.turn_for(RIGHT, 90, DEGREES)로봇에게 90도 오른쪽으로 회전하라고 지시합니다. 이러한 명령은 반복 명령 아래에 들여쓰기되어 있으므로 이러한 동작은 반복 루프의 일부이며 4번 반복됩니다.
-
아직 열려 있지 않으면 "놀이터 열기" 버튼을 선택하여 아트 캔버스 놀이터 을 엽니다.

-
프로젝트를 테스트하려면 "시작" 버튼을 선택하세요.

-
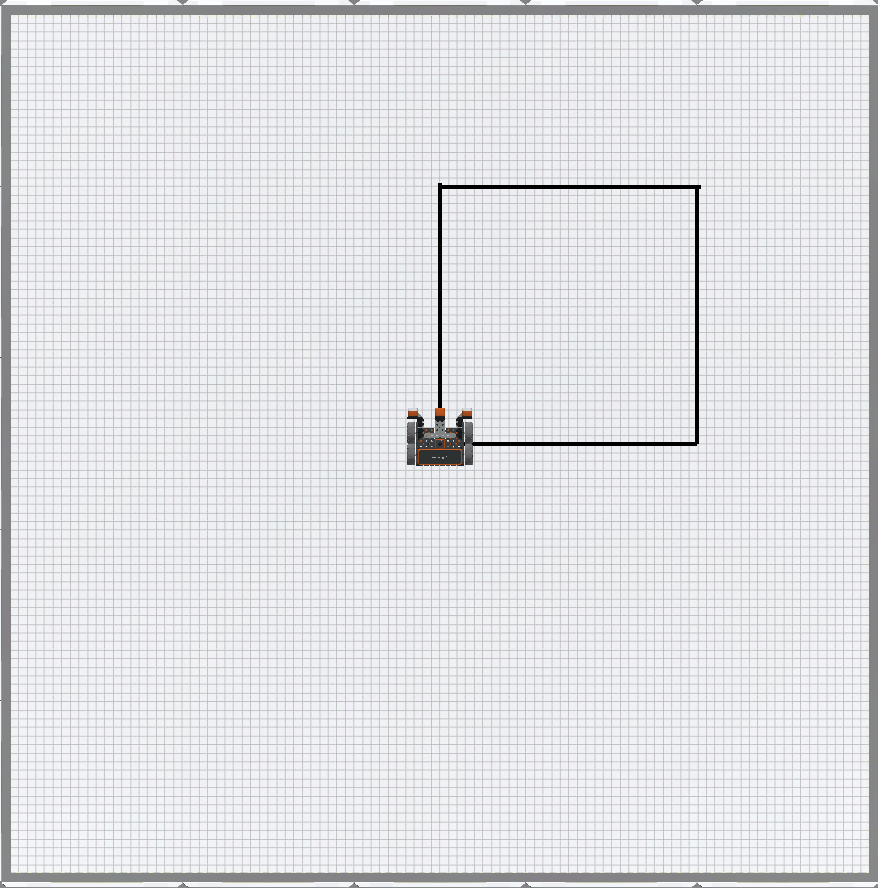
VR 로봇이 앞으로 주행하고 아트 캔버스 놀이터 에서 오른쪽으로 4번 돌아 펜으로 정사각형을 그리는 모습을 지켜보세요.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.