
บทที่ 2: การกระทำซ้ำ
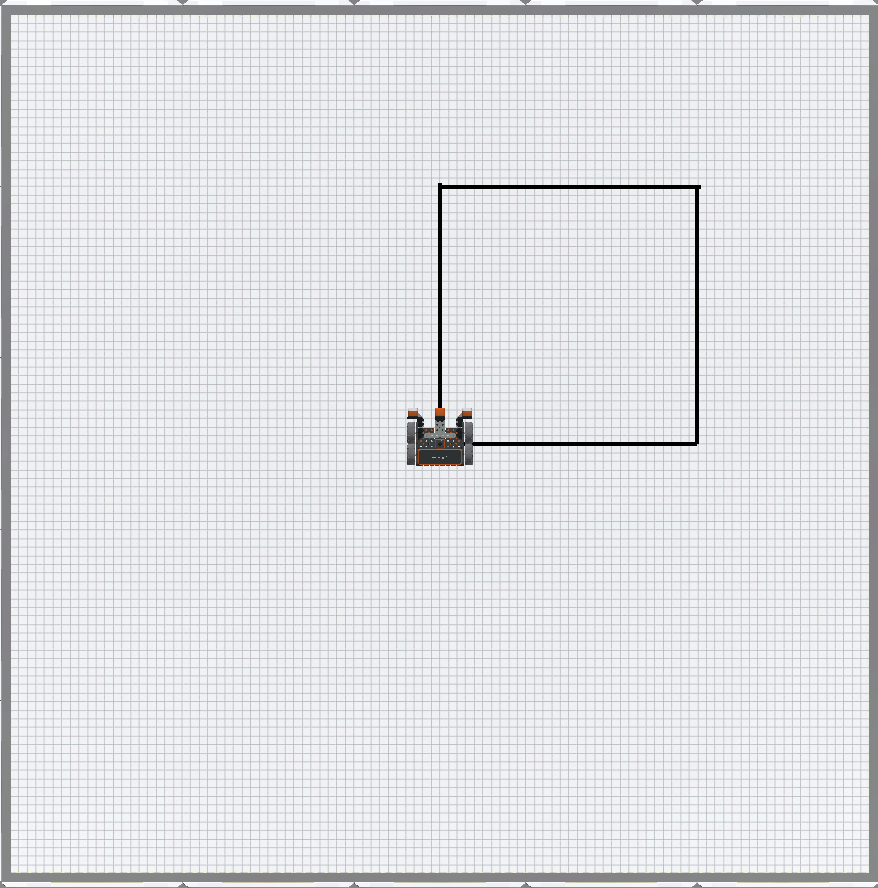
ตอนนี้ VR Robot ได้วาดสี่เหลี่ยมบน Art Canvas Playground โดยใช้ปากกาแล้ว คุณจะเรียนรู้การทำซ้ำบล็อกและทำให้โครงการของคุณง่ายขึ้น บทเรียนนี้จะแนะนำคุณเกี่ยวกับขั้นตอนในการวาดสี่เหลี่ยมบน Art Canvas Playground โดยใช้บล็อก [ทำซ้ำ]
ผลการเรียนรู้
- ระบุวิธีใช้บล็อก [ทำซ้ำ] เพื่อทำซ้ำบล็อกที่อยู่ข้างในเป็นจำนวนครั้งที่กำหนด
- ระบุว่าบล็อก [ทำซ้ำ] สามารถยอมรับจำนวนเต็มเป็นพารามิเตอร์ได้
- ระบุว่าเงื่อนไขถูกใช้เพื่อสิ้นสุดบล็อก [ทำซ้ำ]
- อธิบายว่าเหตุใดจึงต้องใช้บล็อค [Repeat] ในโปรเจกต์
- อธิบายลำดับงานของโครงการที่มีบล็อค [ทำซ้ำ]
เปลี่ยนชื่อโปรเจกต์
- หากยังไม่ได้โหลดโครงการของบทเรียนก่อนหน้าให้โหล ด โครงการ Unit3Lesson1
-
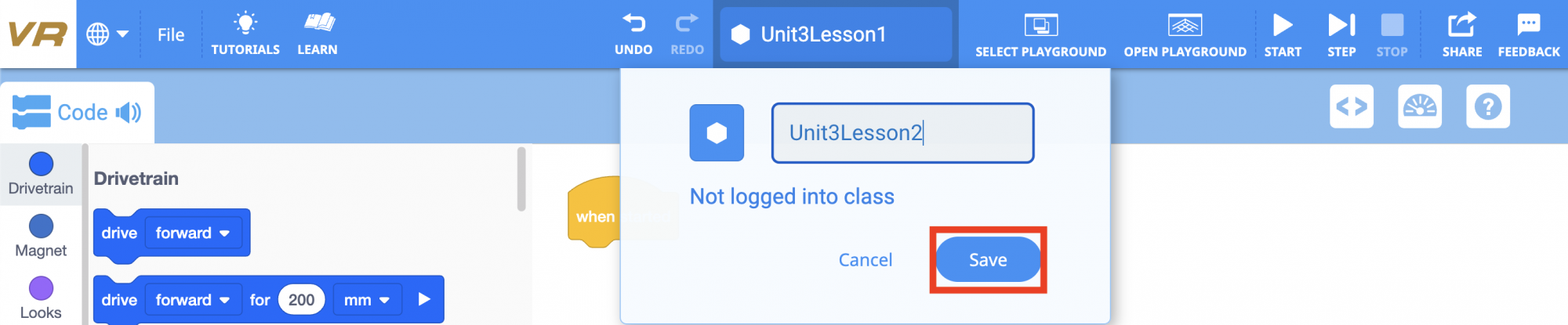
เปลี่ยนชื่อโปรเจกต์โดยเลือกกล่องชื่อโปรเจกต์

-
ป้อนชื่อโปรเจ กต์ใหม่Unit3Lesson2 และเลือก "บันทึก"
การกระทำซ้ำๆ
บล็อก [ทำซ้ำ] ใช้เพื่อทำซ้ำบล็อกภายในจำนวนครั้งที่กำหนด บล็อก [ทำซ้ำ] ช่วยประหยัดเวลาและความพยายามในขณะที่สร้างโปรเจกต์ที่บล็อกทำซ้ำ แทนที่จะใช้เวลาในการลากบล็อกเพิ่มเติมหรือทำซ้ำบล็อกที่มีอยู่ในพื้นที่ทำงานบล็อก [ทำซ้ำ] สามารถใช้เพื่อประหยัดพื้นที่และเวลา
-
เริ่มต้นด้วยการปรับเปลี่ยนโปรเจกต์ก่อนหน้าหรือสร้างโปรเจกต์ใหม่เพื่อให้ตรงกับโปรเจกต์ฐานนี้ คุณอาจใช้บล็อกแบบเดิมสลับบล็อกและทั้งสองอย่างรวมกันเพื่อสร้างโปรเจกต์ของคุณ

-
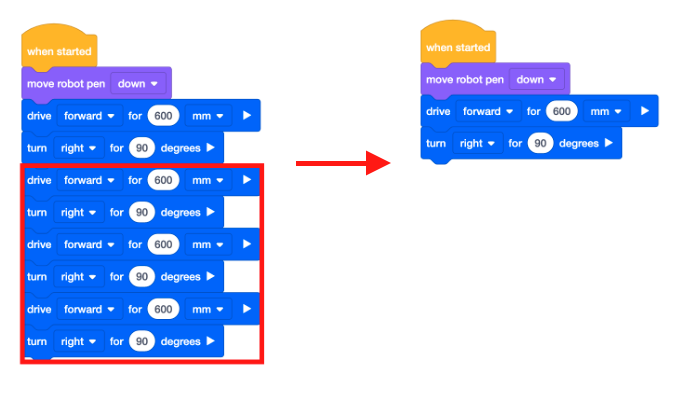
บล็อกที่ซ้ำกันในโครงการนี้คือบล็อก [Drive for] และบล็อก [Turn for] ลบหกบล็อกด้านล่างในโปรเจกต์เพื่อให้เหลือ [Drive for] เพียงหนึ่งบล็อกและ [Turn for] หนึ่งบล็อกใต้บล็อก [move robot pen]
-
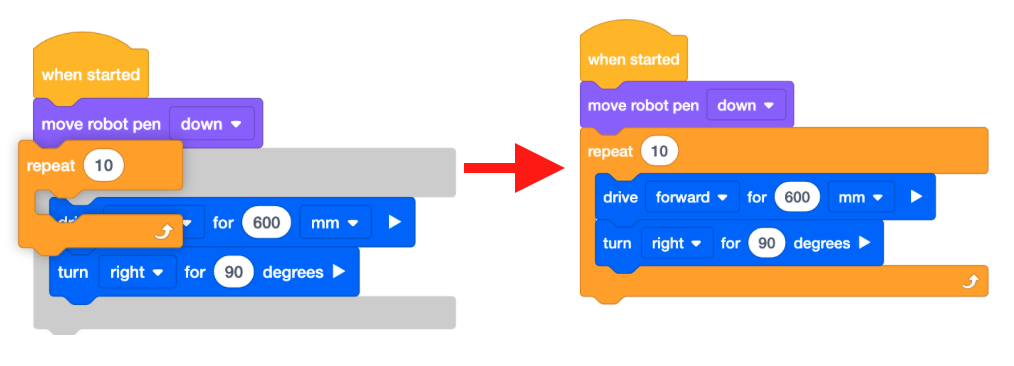
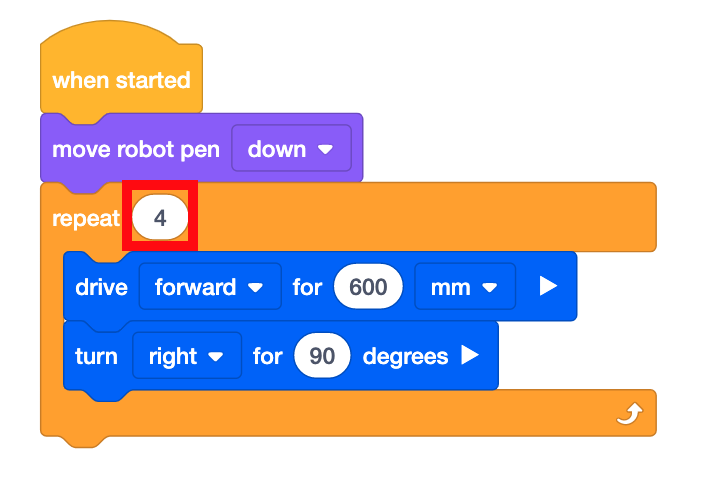
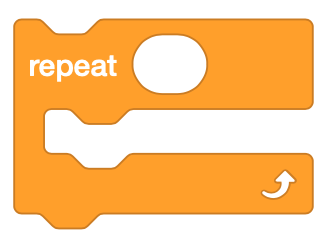
ลากในบล็อค [ทำซ้ำ] สังเกตว่าบล็อก [Repeat] จะสร้างเงาสีเทารอบๆบล็อกที่จะอยู่ด้านในเมื่อวางบล็อกในพื้นที่ทำงาน
-
ตั้งค่าพารามิเตอร์ของบล็อก [ทำซ้ำ] เป็น “4” เพื่อให้หุ่นยนต์ VR วาดสี่เหลี่ยมทั้งสี่ด้าน
การใช้สวิทช์บล็อก
บล็อก [ทำซ้ำ] สามารถรับจำนวนเต็มได้ ทศนิยมจะไม่ทำงานเป็นพารามิเตอร์สำหรับบล็อก [ทำซ้ำ]
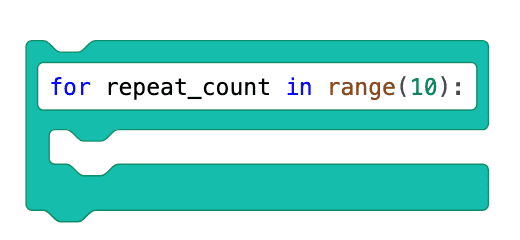
นี่คือบล็อค Switch [Repeat] ในตัวอย่างนี้บล็อก [ทำซ้ำ] ถูกตั้งค่าให้ทำซ้ำ พฤติกรรม 10 ครั้ง คำสั่ง สำหรับ REPEAT_COUNT ใน RANGE (10) คือรหัสที่เริ่มต้นลูปที่ทำซ้ำ 10 ครั้ง
ภาพด้านล่าง แสดงคำสั่ง Switch [Drive for] และ [Turn for] ที่ซ้อนอยู่ภายในสวิตช์ [Repeat] C-block พารามิเตอร์ของบล็อค Switch [Repeat] ถูกตั้งค่าเป็น "4" ซึ่งหมายความว่าคำสั่ง [Drive for] และ [Turn for] ที่ซ้อนอยู่ภายในบล็อค C จะถูกทำซ้ำสี่ครั้ง
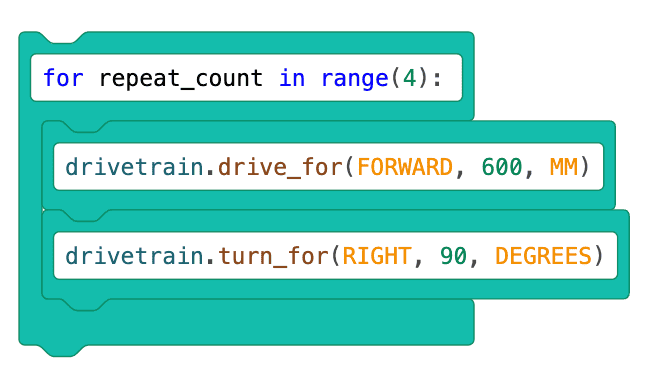
ภาพด้านล่างแสดงสแต็คเดียวกันของบล็อก สวิตช์ที่แปลงเป็นบล็อกสวิตช์เดียว
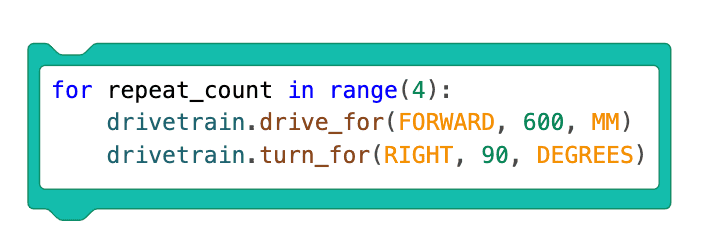
สำหรับ REPEAT_COUNT ในช่วง (4): เป็นคำสั่ง Python ที่สร้างลูปการทำซ้ำที่บอกให้หุ่นยนต์ทำซ้ำบรรทัดที่เยื้องกันของโค้ดภายใต้คำสั่งนี้ 4 ครั้ง
โค้ดบรรทัดถัดไปจะอยู่เยื้อง ใต้คำสั่งทำซ้ำ เนื่องจากเป็นพฤติกรรมที่จะทำซ้ำ ระยะเยื้องถูกตั้งค่าเป็นค่าเริ่มต้นของช่องว่าง 4 ช่อง เมื่อพิมพ์คำสั่ง Python ตรวจสอบให้แน่ใจว่าได้ใช้จำนวนช่องว่างเดิมเสมอเมื่อมีคำสั่งเยื้องเนื่องจากโปรเจกต์จะไม่ทำงานอย่างถูกต้องหากการเยื้องไม่สอดคล้องกัน
คำสั่ง drivetrain.drive_for ( ไปข้างหน้า 600 มม.) บอก ให้หุ่นยนต์ขับไปข้างหน้า 600 มม. และคำสั่ง drivetrain.turn_for (ขวา 90 องศา) บอกให้หุ่นยนต์ เลี้ยวขวา 90 องศา เนื่องจากคำสั่ง เหล่านี้ถูกเยื้องภายใต้คำสั่ง Repeat พฤติกรรมเหล่านี้จึงเป็นส่วนหนึ่งของลูปการทำซ้ำและจะทำซ้ำสี่ครั้ง
-
เลือกปุ่ม “เปิดสนามเด็กเล่น” เพื่อเปิด Art Canvas Playground หากยังไม่ได้เปิดอยู่

-
เลือกปุ่ม "เริ่ม" เพื่อทดสอบโปรเจกต์

-
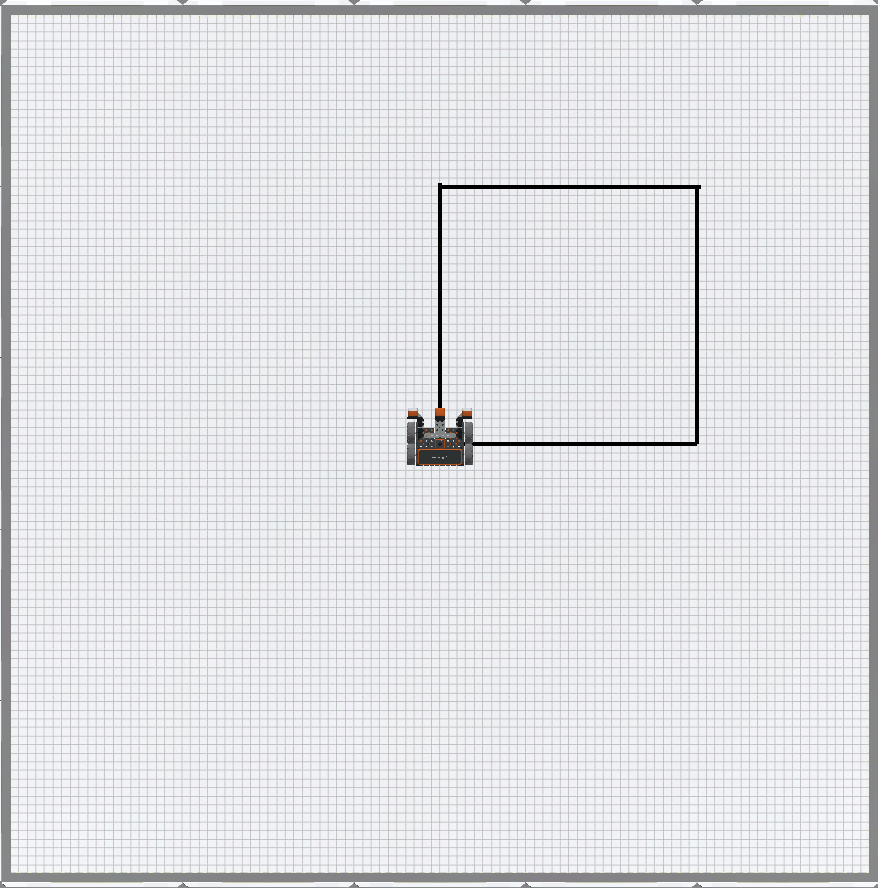
ชมหุ่นยนต์ VR ขับไปข้างหน้าและเลี้ยวขวาสี่ครั้งบน Art Canvas Playground เพื่อวาดรูปสี่เหลี่ยมด้วยปากกา
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป