
대회 연결: 크로스오버
로봇 기능
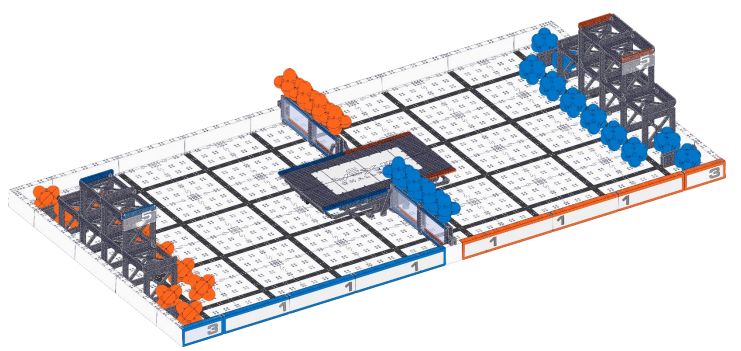
2016 - 2017 VEX Robotics Competition 게임 Crossover에서는 플레이어가 색색의 헥스볼을 득점 영역에 배치해야 했습니다. 총 28개의 헥스볼이 있습니다: 팀당 각 색상 (파란색과 주황색) 의 14개. 팀의 올바른 색상의 헥스볼을 골 존에 배치하여 포인트를 획득했습니다. 2016-2017년 VEX IQ Robotics Competition에서 Vision Sensor를 사용하는
것은 불법이었지만, 대회 팀은 Vision Sensor를 사용하여 팀별 색상의 Hexball을 감지함으로써 혜택을 볼 수 있었습니다. 로봇이 특정 색상의 물체를 향해 움직이고 잡도록 프로그래밍된 경우 자율 주행 기간 동안 로봇이 올바른 색상의 헥스볼을 집는 것이 더 쉬울 것입니다. 자율 주행 기간 동안 로봇이 잘못된 색상의 헥스볼을 선택하면 로봇이 많은 점수를 얻지 못할 가능성이 있습니다.
마찬가지로, 운전 기술 챌린지의 경우, 팀이 수동으로 로봇을 정렬하여 목표에 헥스볼을 배치하는 것이 어려울 수 있습니다. 비전 센서를 사용하여 로봇을 보다 정확하게 정렬할 수 있습니다.
전반적으로, 비전 센서는 숙련된 팀이 로봇이 비전 센서를 사용하여 헥스볼을 감지하고 로봇을 올바르게 정렬하여 헥스볼을 목표에 배치하도록 프로그래밍하는 데 크게 도움이 되었을 것입니다.
![]() 교사 팁
교사 팁
VEX IQ 로보틱스 대회에 참가하고자 하는 학생들에게 VEX IQ 로보틱스 대회에 비전 센서를 사용하는 것은 불법임을 알립니다. 결국 금지 조치가 해제될 수 있습니다. VEX EDR 로봇 대회는 이미 이를 허용하지만 VEX IQ 부문은 아직 허용하지 않습니다. 각 시즌이 시작될 때마다 VEX IQ Challenge의 게임 매뉴얼을 확인하여 비전 센서가 합법적인지 확인하십시오. 비전 센서가 합법화되는 경우, 팀은 비전 센서가 챌린지를 완료하는 데 도움을 줄 수 있는 방법을 브레인스토밍할 수 있습니다.
![]() 학습의 폭을 넓히세요
학습의 폭을 넓히세요
이 활동을 확장하려면 학생들에게 이 대회 게임에 잠재적으로 사용할 수 있는 파란색과 주황색 물체를 감지할 수 있는 프로젝트를 설계하고 개요를 작성하도록 요청하세요! 학생들에게 다음을 수행하도록
요청한다.

