
ロボットの機能
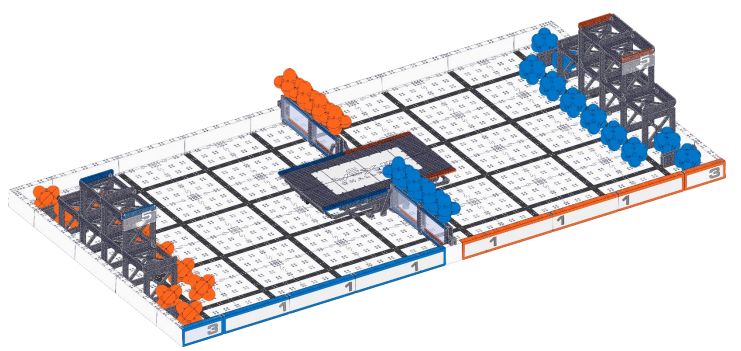
2016 ~ 2017 年の VEX Robotics Competition ゲーム Crossover では、プレイヤーは自分の色のヘックスボールを得点ゾーンに配置する必要がありました。 ヘックスボールは合計 28 個あり、チームごとに各色 (青とオレンジ) が 14 個ありました。 チームの正しい色のヘックスボールをゴールゾーンに置くと、ポイントが獲得できます。
2016 年から 2017 年の VEX IQ ロボット競技会でビジョン センサーを使用することは違法でしたが、競技チームがビジョン センサーを使用してチーム固有の色のヘックスボールを検出することで利益を得られた可能性があることは想像できます。 ロボットが特定の色の物体に向かって移動して掴むようにプログラムされていれば、ロボットが自律期間中に正しい色の六角球を拾いやすくなります。 ロボットが自律期間中に間違った色の六角球を選択した場合、ロボットはそれほど多くのポイントを獲得できない可能性があります。
同様に、ドライビング スキル チャレンジの場合、ヘクスボールをゴールに入れるのに十分なだけ手動でロボットを整列させるのはチームにとって難しい場合があります。 ビジョンセンサーを使用すると、ロボットをより正確に位置合わせすることができます。
全体として、視覚センサーは、熟練したチームが視覚センサーを使用して六角球を検出し、六角球をゴールに配置するためにロボットを適切に位置合わせするようにロボットをプログラムするのに非常に役立ちました。
![]() 教師へのヒント
教師へのヒント
VEX IQ ロボティクス コンペティションへの参加に興味のある学生には、VEX IQ ロボティクス コンペティションでビジョン センサーを使用することは依然として違法であることをアドバイスしてください。 最終的には禁止が解除される可能性があります。 VEX EDR Robotics Competitions ではすでに許可されていますが、VEX IQ 部門ではまだ許可されていません。 各シーズンの開始時に VEX IQ Challenge のゲーム マニュアルを確認して、ビジョン センサーの使用が合法かどうかを確認してください。 それが合法になった場合、チームはビジョンセンサーがチャレンジの完了を支援できる方法をブレインストーミングすることができます。
![]() 学習の幅を広げる
学習の幅を広げる
このアクティビティを拡張するには、生徒に、この競技ゲームで使用できる可能性のある青とオレンジのオブジェクトを検出できるプロジェクトをデザインして概要を説明するよう依頼してください。
生徒に次のことを行うように指示します。
-
オブジェクトの検出サンプル プロジェクトを開きます。
-
オレンジ色の物体を検出するようにビジョン センサーを設定します。 新しいオブジェクトの構成については、 ここ をクリックするか、ビジョン センサーの構成チュートリアル ビデオをご覧ください。

-
プロジェクトをダウンロードして実行 し、ロボットが青色とオレンジ色のオブジェクトを検出できるかどうかを観察します。 ヘルプが必要な場合は、「プロジェクトのダウンロードと実行」チュートリアル ビデオをご覧ください。
-
時間が許せば、クロスオーバー フィールドと同様のゲーム フィールドをセットアップします。 Detecting Objects プロジェクトの使用と変更を練習して、ポイントを獲得してください。