机器人能力
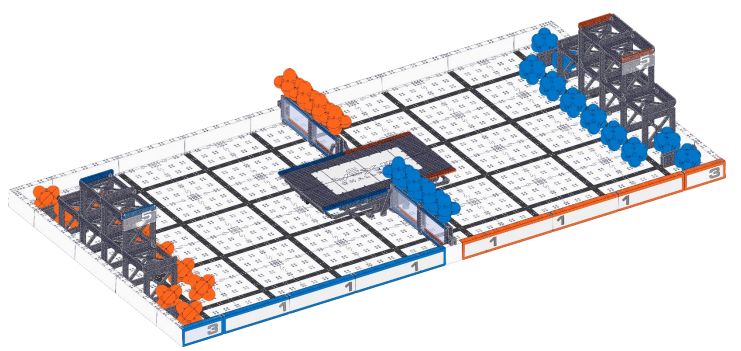
2016 - 2017 年 VEX 机器人竞赛游戏 Crossover 要求玩家将彩色六角球放入得分区。 总共 28 个六角球:每队每种颜色(蓝色和橙色)各 14 个。 将球队正确颜色的六角球放入球门区即可得分。
尽管在 2016-2017 年的 VEX IQ 机器人竞赛中使用视觉传感器是违法的,但您可以想象,竞赛团队可以通过使用视觉传感器来检测团队特定的彩色六角球而受益。 如果机器人被编程为移动并抓住特定颜色的物体,那么机器人在自主期间会更容易拾取正确颜色的六角球。 如果机器人在自主期间选择了错误颜色的六角球,则机器人有可能不会得分。
同样,对于驾驶技能挑战赛,团队可能很难手动排列机器人以将六角球放入球门。 视觉传感器可用于更准确地对准机器人。
总体而言,视觉传感器将极大地帮助熟练的团队对机器人进行编程,以使用视觉传感器检测六角球并正确对齐机器人,以便将六角球放入球门。
![]() 老师提示
老师提示
建议有兴趣参加 VEX IQ 机器人竞赛的学生,在 VEX IQ 机器人竞赛中使用视觉传感器仍然是非法的。 最终,禁令可能会被取消。 VEX EDR 机器人竞赛已经允许这样做,但 VEX IQ 部门还不允许。 在每个赛季开始时检查 VEX IQ 挑战赛的游戏手册,以确定视觉传感器是否可以合法使用。 如果/当它变得合法时,团队可以集思广益,讨论视觉传感器如何帮助完成挑战。