
การเชื่อมต่อการแข่งขัน: ครอสโอเวอร์
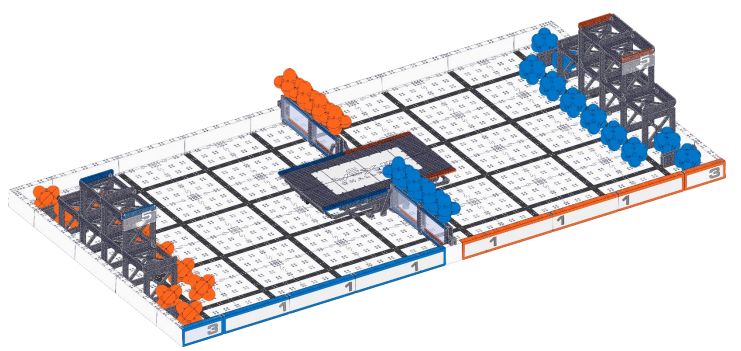 สนามครอสโอเวอร์
สนามครอสโอเวอร์ ความสามารถของหุ่นยนต์
ครอสโอเวอร์เกมการแข่งขันหุ่นยนต์ vex ปี 2016 - 2017
กำหนดให้ผู้เล่นวางลูกบอลหกเหลี่ยมสีของพวกเขาในโซนการให้คะแนน มีลูกบอลหกเหลี่ยมทั้งหมด 28 ลูก: สีละ 14
ลูก (สีน้ำเงินและสีส้ม) ต่อทีม คะแนนที่ได้รับจากการวาง Hexball
ที่มีสีถูกต้องของทีมในโซนเป้าหมายของพวกเขา
แม้ว่าการใช้ Vision Sensor ในการแข่งขันหุ่นยนต์ vex IQ
ในปี 2016 -2017 จะผิดกฎหมายแต่คุณสามารถจินตนาการได้ว่าทีมแข่งขันอาจได้รับประโยชน์จากการใช้ Vision Sensor
เพื่อตรวจจับ Hexball สีเฉพาะของทีม มันจะง่ายกว่าสำหรับหุ่นยนต์ที่จะหยิบ Hexball
ที่มีสีถูกต้องในช่วงเวลาอิสระหากหุ่นยนต์ถูกตั้งโปรแกรมให้เคลื่อนที่ไปหาและหยิบวัตถุที่มีสีบางอย่าง
หากหุ่นยนต์เลือก Hexball
ที่มีสีไม่ถูกต้องในช่วงเวลาอิสระมีความเป็นไปได้ที่หุ่นยนต์จะไม่ได้คะแนนมากเท่าที่ควร
ในทำนองเดียวกันสำหรับการท้าทายทักษะการขับขี่อาจเป็นเรื่องยากสำหรับทีมที่จะจัดเรียงหุ่นยนต์ด้วยตนเองให้เพียงพอที่จะวาง
Hexball ในเป้าหมาย
สามารถใช้เซ็นเซอร์ตรวจจับการมองเห็นเพื่อจัดตำแหน่งหุ่นยนต์ได้อย่างแม่นยำยิ่งขึ้น
โดยรวมแล้ว
Vision Sensor จะช่วยทีมงานที่มีทักษะในการตั้งโปรแกรมหุ่นยนต์เพื่อใช้ Vision Sensor เพื่อตรวจจับ Hexballs
และจัดตำแหน่งหุ่นยนต์อย่างถูกต้องเพื่อวาง Hexballs ไปสู่เป้าหมาย
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
ให้คำแนะนำแก่นักเรียนที่มีความสนใจในการแข่งขันหุ่นยนต์ vex IQ ว่าการใช้ Vision Sensors สำหรับการแข่งขันหุ่นยนต์ vex IQ ยังคงผิดกฎหมาย ในที่สุดการห้ามอาจถูกยกเลิก การแข่งขันหุ่นยนต์ VEX EDR อนุญาตแล้วแต่แผนก vex IQ ยังไม่อนุญาต ตรวจสอบคู่มือเกมของ vex IQ Challenge ในช่วงเริ่มต้นของแต่ละฤดูกาลเพื่อตรวจสอบว่า Vision Sensor ถูกกฎหมายในการใช้งานหรือไม่ หาก/เมื่อกลายเป็นกฎหมายทีมสามารถระดมความคิดเกี่ยวกับวิธีที่ Vision Sensor อาจสามารถช่วยในการทำสิ่งที่ท้าทายให้สำเร็จได้
![]() ขยายการเรียนรู้ของท่าน
ขยายการเรียนรู้ของท่าน
หากต้องการขยายกิจกรรมนี้ขอให้นักเรียนของคุณออกแบบและร่างโครงงานที่พวกเขาสามารถตรวจจับวัตถุสีน้ำเงินและสีส้มที่พวกเขาอาจใช้สำหรับเกมการแข่งขันนี้!
ขอให้นักเรียนทำสิ่งต่อไปนี้:
- เปิดโครงการตัวอย่าง Detecting Objects
- กำหนดค่าเซ็นเซอร์ตรวจจับการมองเห็นเพื่อตรวจจับวัตถุสีส้ม
สำหรับความช่วยเหลือในการกำหนดค่าวัตถุใหม่คลิก ที่นี่ หรือดูวิดีโอสอนการกำหนดค่า Vision Sensor

- ดาวน์โหลดและเรียก ใช้โครงการเพื่อสังเกตว่าหุ่นยนต์สามารถตรวจจับวัตถุสีน้ำเงินและสีส้มได้หรือไม่ หากต้องการความช่วยเหลือโปรดดูวิดีโอแนะนำการดาวน์โหลดและเรียกใช้โครงการ
- หากมีเวลาให้ตั้งค่าฟิลด์เกมที่คล้ายกับฟิลด์ครอสโอเวอร์ ฝึกฝนการใช้และปรับเปลี่ยนโครงการ Detecting Objects เพื่อทำคะแนน!